

лабораторная работа / Лабораторна_работа_1
.doc
Лабораторна робота №1
Варіант № 13
«Дослідження імпульсних систем»
Мета роботи – навчитися формувати імпульсні сигнали різної форми та дослідити реакцію системи на дані вхідні сигнали.
Теоретичні відомості
Система автоматичного керування називається дискретною, якщо до її складу входить хоча б одна ланка дискретної дії. Ланка дискретної дії, або дискретний елемент, – це ланка, вихідна величина якої змінюється дискретно, тобто стрибками, навіть при плавному змінюванні вхідної величини. Дискретний елемент перетворює безперервний сигнал на дискретний за рахунок квантування сигналу за рівнем, за часом або за рівнем і часом.
При квантуванні за рівнем безперервний вхідний сигнал перетворюється на ступінчастий, тобто значення квантованого сигналу може дорівнювати тільки визначеним значенням х0, х1, х2, ..., хn, а зміна рівня сигналу відбувається стрибкоподібно при досягненні вхідним сигналом чергового дискретного рівня хі (див. рис. 1а).
При квантуванні за часом безперервний вхідний сигнал перетворюється на дискретний шляхом фіксування значення вхідного сигналу в дискретні моменти часу t0, t1, t2, ..., tn (див. рис. 1б).
При одночасному квантуванні безперервного вхідного сигналу за рівнем і за часом значення вихідного сигналу змінюється лише в дискретні моменти часу t0, t1, t2, ..., tn, причому вихідний сигнал може набувати тільки тих значень, які визначаються дискретними рівнями х0, х1, х2, ..., хn (див. рис. 1в).
Внаслідок квантування за часом у САУ інформація між двома або більше елементами передається послідовністю імпульсів.
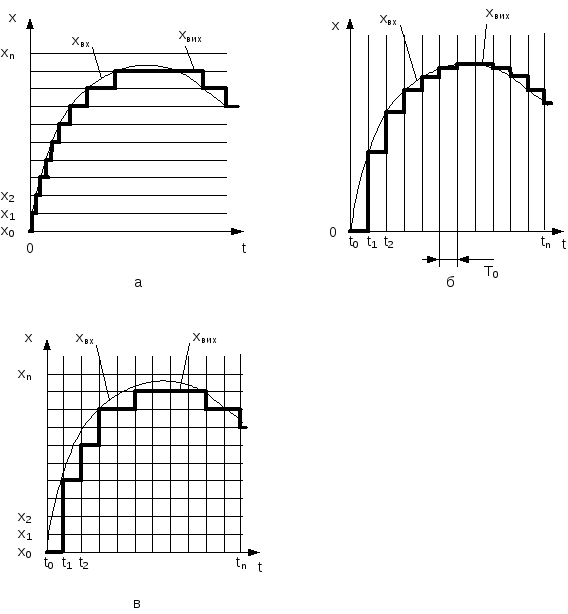
Рисунок 1 – Види квантування сигналів
Така послідовність імпульсів містить корисну інформацію лише в тому разі, якщо вона промодульована яким-небудь сигналом. Функцію модуляції в імпульсних САУ виконують модулятори, які перетворюють безперервні сигнали у послідовність імпульсів, один з параметрів яких (модульований параметр) змінюється за законом змінювання вхідного безперервного сигналу.
Основними параметрами послідовності імпульсів є амплітуда імпульсів, тривалість (ширина) імпульсів, період повторення та положення імпульсу всередині періоду (часовий зсув, або фаза імпульсу). Залежно від того, який з параметрів послідовності імпульсів змінюється при змінюванні вхідного сигналу, розрізняють такі види імпульсної модуляції: амплітудно-імпульсну (АІМ), широтно-імпульсну (ШІМ), часово-імпульсну (ЧАІМ). Часово-імпульсна модуляція, в свою чергу, поділяється на два види: фазоімпульсну (ФІМ) і частотно-імпульсну (ЧІМ). Крім того, розрізняють два роди модуляції залежно від того, чи змінюється модульований параметр протягом часу існування імпульсу. Якщо модульований параметр не змінюється, то імпульсна модуляція належить до першого роду модуляції (ІМ І), якщо ж модульований параметр змінюється відповідно до поточного значення вхідного сигналу, – до другого роду модуляції (ІМ ІІ).
Залежно від виду і роду модуляції імпульсні САУ бувають трьох типів: амплітудно-імпульсні (АІС), широтно-імпульсні (ШІС) і часово-імпульсні (ЧАІС).
Слід зазначити, що в імпульсних системах відбувається часткова втрата інформації про безперервний вхідний сигнал через те, що безперервний сигнал перетворюється на послідовність імпульсів, а в проміжках часу між імпульсами сигнал відсутній. Однак імпульсні системи мають низку переваг, які зумовили їх використання в САУ, зокрема в автоматизованому електроприводі. Серед основних переваг імпульсних САУ виділимо такі:
1 У зв’язку з тим, що імпульсні керуючі пристрої підключені до об’єкта управління лише незначну частину періоду квантування, є можливість використовувати одну систему управління для керування кількома однотипними об’єктами, які по черзі (впродовж періоду квантування) підключаються до керуючого пристрою.
2 Імпульсні системи менш чутливі до перешкод. Це пов’язано з тим, що імпульсні САУ передають інформацію протягом короткого часу, а більшу частину періоду квантування САУ залишаються розімкнутими і не сприймають перешкод.
Хід роботи
Таблиця 1 – Параметри інтегруючої, аперіодичної та коливальної ланок
|
Номер варіанта |
Ті |
Та |
Ка |
Тк1 |
Тк2 |
Кк |
|
13 |
0,28 |
0,62 |
20 |
0,07 |
0,6 |
38 |
1. Запускаемо програму MATLAB, додаток Simulink
2. Збираемо схему для дослідження імпульсної системи (рис. 2)
W(p)
Рисунок 2– Схема імпульсної системи
Для формування вхідного сигналу використовуємо блок Step (сигнал прямокутної форми) з бібліотеки блоків Sources.
Імпульсний вхідний сигнал формуємо за допомогою трьох блоків: Pulse Generator (бібліотека Sources), Switch (бібліотека Signal Routing), Ground (бібліотека Sources).
Робота цих блоків зводиться до наступного. В блоці Switch встановлюється умова, при виконанні якої сигнал проходить через вхід 1 (вхід 3 відімкнений), якщо умова не виконується, то сигнал проходить через вхід 3 (вхід 1 відімкнений). Як правило, в блоці Switch встановлюється така умова (критерій): u2>=Threshold, де Threshold – значення, що встановлюється користувачем. Тобто, коли на вході 2 блока Switch присутній сигнал, значення якого більше значення Threshold, на виході перемикача присутній сигнал з першого входу; інакше на виході перемикача присутній сигнал з третього входу.
До другого входу перемикача підключається генератор імпульсів, за допомогою якого і формується послідовність імпульсів (тобто визначається, коли сигнал проходить через вхід 1 внаслідок виконання умови u2>=Threshold).
2.1. Як
досліджуваний об’єкт використовуємо
інтегруючу ланку
![]()
Графік вхідного сигналу (рис. 3):

Рисунок 3 – Графік вхідного сигналу
(Графік вхідного сигналу для всіх об’єктів 2-го розділу однаковий)
Графік вихідного сигналу (рис. 4):

Рисунок 4 – Графік вихідного сигналу
2 .2.
Як досліджуваний об’єкт використовуємо
аперіодичну ланку
.2.
Як досліджуваний об’єкт використовуємо
аперіодичну ланку
![]() Графік вихідного сигналу (рис. 5):
Графік вихідного сигналу (рис. 5):
Рисунок 5
– Графік вихідного сигналу
2.3. Як досліджуваний об’єкт використовуємо коливальну ланку
![]()
Графік вихідного сигналу (рис. 6):

Рисунок 6 – Графік вихідного сигналу
3. Збираємо схему для дослідження імпульсної системи (рис. 7).
W(p)
Рисунок 7– Схема імпульсної системи
Для формування вхідного сигналу використовуємо блок Sine Wave (сигнал синусоїдальної форми) з бібліотеки блоків Sources.
3.1. Як
досліджуваний об’єкт використовуємо
інтегруючу ланку
![]()
Графік вхідного сигналу (рис. 8):

Рисунок 8 – Графік вхідного сигналу
(Графік вхідного сигналу для всіх об’єктів 3-го розділу однаковий)
Графік вихідного сигналу (рис. 9):

Рисунок 9 – Графік вихідного сигналу
3.2. Як
досліджуваний об’єкт використовуємо
аперіодичну ланку
![]() Графік вихідного сигналу (рис. 10):
Графік вихідного сигналу (рис. 10):

Рисунок 10 – Графік вихідного сигналу
3.3. Як досліджуваний об’єкт використовуємо коливальну ланку
![]()
Графік вихідного сигналу (рис. 11):
Рисунок
11 – Графік вихідного сигналу
4. Збираємо схему для дослідження імпульсної системи (рис. 12)
W(p)
Рисунок 12– Схема імпульсної системи
Досліджуємо реакцію системи з екстраполятором нульового порядку (Zero-Order Hold) на прямокутний вхідний сигнал.
4.1. Як
досліджуваний об’єкт використовуємо
інтегруючу ланку
![]()
Графік вхідного сигналу (рис. 13):

Рисунок 13 – Графік вхідного сигналу
(Графік вхідного сигналу для всіх об’єктів 4-го розділу однаковий)
Графік вихідного сигналу (рис. 14):

Рисунок 14 – Графік вихідного сигналу
4.2. Як
досліджуваний об’єкт використовуємо
аперіодичну ланку
![]() Графік вихідного сигналу (рис. 15):
Графік вихідного сигналу (рис. 15):

Рисунок 15 – Графік вихідного сигналу
4.3. Як досліджуваний об’єкт використовуємо коливальну ланку
![]()
Графік вихідного сигналу (рис. 16):

Рисунок 16 – Графік вихідного сигналу
5. Збираємо схему для дослідження імпульсної системи (рис. 17)
W(p)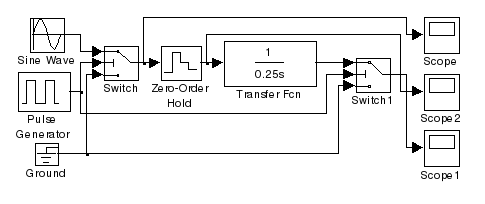
Рисунок 17– Схема імпульсної системи
Досліджуємо реакцію системи з екстраполятором нульового порядку (Zero-Order Hold) на синусоїдальний вхідний сигнал.
5.1. Як
досліджуваний об’єкт використовуємо
інтегруючу ланку
![]()
Графік вхідного сигналу (рис. 18):

Рисунок 18 – Графік вхідного сигналу
(Графік вхідного сигналу для всіх об’єктів 5-го розділу однаковий)
Графік вихідного сигналу (рис. 19):

Рисунок 19 – Графік вихідного сигналу
5 .2.
Як досліджуваний об’єкт використовуємо
аперіодичну ланку
.2.
Як досліджуваний об’єкт використовуємо
аперіодичну ланку
![]() Графік вихідного сигналу (рис. 20):
Графік вихідного сигналу (рис. 20):
Рисунок 20
– Графік вихідного сигналу
5.3. Як досліджуваний об’єкт використовуємо коливальну ланку
![]()
Графік вихідного сигналу (рис. 21):

Рисунок 21 – Графік вихідного сигналу
6. Збираємо схему для дослідження імпульсної системи (рис. 22)
W(p)
Рисунок 22– Схема імпульсної системи
Досліджуємо реакцію системи з екстраполятором першого порядку (First-Order Hold) на прямокутний вхідний сигнал.
6.1. Як досліджуваний об’єкт використовуємо інтегруючу ланку
![]()
Графік вхідного сигналу (рис. 23):

Рисунок 23 – Графік вхідного сигналу
(Графік вхідного сигналу для всіх об’єктів 6-го розділу однаковий)
Графік вихідного сигналу (рис. 24):

Рисунок 24 – Графік вихідного сигналу
6.2. Як
досліджуваний об’єкт використовуємо
аперіодичну ланку
![]() Графік вихідного сигналу (рис. 25):
Графік вихідного сигналу (рис. 25):

Рисунок 25 – Графік вихідного сигналу
6.3. Як досліджуваний об’єкт використовуємо коливальну ланку
![]()
Графік вихідного сигналу (рис. 26):

Рисунок 26 – Графік вихідного сигналу
7. Збираємо схему для дослідження імпульсної системи (рис. 27)
W(p)
Рисунок 27– Схема імпульсної системи
Досліджуємо реакцію системи з екстраполятором першого порядку (First-Order Hold) на синусоїдальний вхідний сигнал.
7.1. Як досліджуваний об’єкт використовуємо інтегруючу ланку
![]()
Графік вхідного сигналу (рис. 28):

Рисунок 28 – Графік вхідного сигналу
(Графік вхідного сигналу для всіх об’єктів 7-го розділу однаковий)
Графік вихідного сигналу (рис. 29):

Рисунок 29 – Графік вихідного сигналу
7.2. Як
досліджуваний об’єкт використовуємо
аперіодичну ланку
![]() Графік вихідного сигналу (рис. 30):
Графік вихідного сигналу (рис. 30):

Рисунок 30 – Графік вихідного сигналу
7.3.Як досліджуваний об’єкт використовуємо коливальну ланку
![]()
Графік вихідного сигналу (рис. 31):

Рисунок 31 – Графік вихідного сигналу
ВИСНОВОК:
Навчилися формувати імпульсні сигнали різної форми та дослідили реакцію системи на дані вхідні сигнали.
М іністерство
освіти і науки України
іністерство
освіти і науки України
Сумський державний університет
Лабораторних робота № 1
з дисципліни
“Теорія автоматичного управління”
В иконав
студент
иконав
студент
Групи
Перевірив
Суми 2007