

лабораторная работа / metodicheskie_ukazaniya_po_vypolneniyu_laboratornyh_rabot_po
.pdf
|
|
|
|
|
|
|
|
|
Окончание табл. 1 |
|||
123452674869 3 |
|
|
|
|
|
|
2 296 3 6 |
|
|
|
||
|
|
4 96 |
|
|
8 86 39 96 |
|
||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
1111 |
|
111 |
1 |
|
2 1 |
|
|
|
|
|
|
|
2 1 |
|
|
|
||||
1232456 789 2328 |
|
11 |
1 |
1 1 |
|
|
|
2 1 |
1 |
|
||
67 53 232 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
11 |
1 |
2 1 |
1 |
12 |
1 |
1 |
111 |
||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
11 |
1 |
|
1 |
|
|
11 |
1 |
|
1 |
|
|
|
|
|
2 |
||
1232456 789 2328 |
|
|
|
|
|
1 |
|
2 |
||||
1 |
|
|
|
1 |
|
|
||||||
67 53 4 8 |
|
|
|
2 1 |
2 |
2 1 |
2 |
12 |
1 |
|||
|
|
|
|
|
|
|
||||||
|
|
|
12 |
1 |
|
|
||||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||
в преобразованной схеме образовались новые типовые соединения звеньев. Эти соединения опять заменяются эквивалентными звенья) ми, затем вновь может потребоваться перенос точек разветвления и сумматоров и т. д.
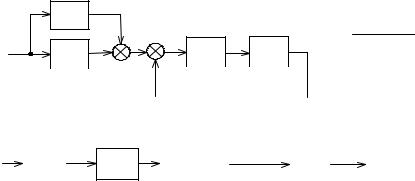
Пример. Пусть необходимо получить эквивалентное представле) ние для структуры, приведенной на рис. 1.
13
11
1 |
1 |
12 |
1 |
5 |
1 |
6 |
12
17 
14
Рис. 1. Исходная структура САУ
Преобразованиевключаетнесколькоэтапов,показанныхнарис.2–5.
13 
|
1 |
1 |
|
11 |
12 |
15 |
16 |
|
1 |
2 |
|
|
|
|
17 
14 2316
Рис. 2. Перенос узла через сумматор
11
13 |
|
|
W5W6 |
|
|
|
|
W9 = |
|
|
|
|
1 + W7W6W5 |
|
1 |
1 |
12 |
15 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W8 = |
W4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W6 |
|||
|
|
|
|
|
|
|
|
|
|
14 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
Рис. 3. Свертывание обратной связи и последовательного соединения |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
111 |
|
|
112 |
|
|
|
|
|
|
|
|
|
1123 |
|
|
|
||||
|
W10 = |
|
W3W9 |
|
Wэкв |
= W10W11 |
= |
W1W3W5W6 + W2W3W5W6 |
|||||||||||||
|
−W8W3W9 |
1 −W5W6W7 − W3W4W5 |
|||||||||||||||||||
1 |
|
|
|
|
|
|
|
|
|||||||||||||
|
W11 = W1 + W2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Рис. 4. Свертывание обрат7 |
|
Рис. 5. Свертывание последователь7 |
|||||||||||||||||||
ной связи и параллельного |
|
|
|
|
|
ного соединения |
|||||||||||||||
|
соединения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Таким образом, первый способ преобразования структурных схем заключается в непосредственном использовании правил, приведенных в табл.1. Неудобство использования этого подхода заключается в том, чтопорядокпримененияформулздесьдостаточнопроизволен,возмож) ны ошибочные шаги, усложняющие поиск решения.
Второй способ для получения ПФ многоконтурной системы заклю) чается в использовании модели системы в виде сигнального графа.
Сигнальный граф позволяет графически описать линейные связи между переменными, он состоит изузлов (вершин) и соединяющих их направленных ветвей.
Ветвь соответствует блоку структурной схемы, она отражает зави) симость между входной и выходной переменными. Сумма всех сигна) лов, входящих в узел, образует соответствующую этому узлу перемен) ную.
Последовательностьветвеймеждудвумяузламиназываетсяпутем. Контуром называется замкнутый путь, который начинается и за)
канчивается в одном и том же узле, причем ни один узел не встречается наэтомпутидважды.Коэффициентпередачиконтура–этопроизведе) ние всех входящих в него дуг.
Контурыназываютсянекасающимися,еслионинеимеютобщихуз) лов.
Сигнальный граф однозначно соответствует структурной схеме.
12

Пусть X(s) и Y(s) – входная и выходная переменные системы. Тог) да для вычисления ПФ системы управления по ее графу можно вос) пользоваться формулой Мейсона:
|
|
N |
|
|
X(s) |
|
∑Pi∆i |
|
|
= W(s) = |
i=1 |
|
, |
|
|
|
∆ |
||
Y(s) |
|
|||
где Pi – i й путь от входа к выходу; N – количество путей; ∆– опреде) литель графа; ∆i – дополнительный множитель для пути.
Определитель графа получается по формуле:
K |
M,Q |
R,S,L |
|
∆ =1− ∑Lk + |
∑ LmLq − |
∑ |
Lr LsLl +..., |
k=1 |
m=1,q=1 |
r=1,s=1,l=1 |
|
K
где ∑Lk – сумма коэффициентов передачи всех отдельных конту)
k=1 |
|
|
|
M,Q |
|
||
ров; |
∑ |
LmLq – сумма произведений всех возможных комбинаций |
|
m=1,q=1 |
|
||
|
|
R,S,L |
|
из двух некасающихся контуров; ∑ |
Lr LsLl – сумма произведе) |
||
r =1,s=1,l=1
ний всех возможных комбинаций из трех некасающихся контуров. Дополнительный множитель для i го пути равен определителю графа, в котором приравнены нулю коэффициенты передачи конту)
ров, касающихся этого пути.
Рассмотрим пример получения ПФ многоконтурной системы с ис) пользованием формулы Мейсона для структуры рис. 1, которой соот) ветствует граф, показанный на рис. 6.
От входа к выходу ведут два пути:
11
X(S) |
12 |
13 |
14 |
15 |
2678 |
319 31
Рис. 6. Описание системы управления сигнальным графом
13
P1=W1W3W5W6.
P2= W2W3W5W6
В графе есть два контура:
L1=–W3W5W4
L2=–W5W6W7 .
Контур L1 касается контура L2, поэтому определитель графа вы) числяется по формуле:
∆ =1−(L1 + L2 ) .
Контуры в этом примере касаются всех путей, поэтому дополни) тельные множители путей
|
|
∆1 = ∆2 =1. |
|
|
|
|
|
||
Окончательно можно записать: |
|
|
|
|
|
|
|||
|
2 |
|
|
|
|
|
|
|
|
|
∑Pi∆i |
|
W1W3W5W6 +W2W3W5W6 |
|
|||||
W(s) = |
i=1 |
= |
. |
||||||
∆ |
|
1−W W W +W W W |
|
||||||
|
|
3 |
5 |
4 |
5 |
6 |
7 |
|
|
Таким образом, использование сигнальных графов и применение формулы Мейсона позволяет алгоритмизировать процесс упрощения структурной схемы.
2.Использование пакета MatLab
Впакете MatLab имеется ряд функций, с помощью которых мож) но выполнять структурные преобразования:
– series(w1,w2) – последовательное соединение динамических зве) ньев;
– parallel(w1,w2) – параллельное соединение динамических зве) ньев;
– feedback(w1,w2) – включение звена w2 в контур отрицательной обратной связи к w1;
– feedback(w1,w2) – включение звена w2 в контур отрицательной обратной связи звена w1;
– feedback(w1,w2,sign) – включение звена w2 в контур обратной связи звена w1 с указанием знака + или – (очевидно, feedback(w1,w2)= =feedback(w1,w2,)1));
Пример:
>>w=tf([1 2],[1 2 2])
Transfer function: s + 2
14
——————
s^2 + 2 s + 2
>>w1=tf([1 2 3],[1 2 2])
Transfer function: s^2 + 2 s + 3
——————
s^2 + 2 s + 2
>>w2=series(w,w1)
Transfer function: s^3 + 4 s^2 + 7 s + 6
——————————————
s^4 + 4 s^3 + 8 s^2 + 8 s + 4
>>w3=parallel(w,w1)
Transfer function:
s^4 + 5 s^3 + 13 s^2 + 16 s + 10
————————————————
s^4 + 4 s^3 + 8 s^2 + 8 s + 4
>>w4=feedback(w,w1)
Transfer function:
s^3 + 4 s^2 + 6 s + 4
————————————————
s^4 + 5 s^3 + 12 s^2 + 15 s + 10
Дляпроверкиправильностипроведенныхпреобразованийнеобходимо собратьсхемуисходнойСАУисоответствующуюейэквивалентнуюсхемув MatLabSimulink.Задачасчитаетсярешенной,еслиприподаченавходобо) ихсхемодинаковыхтестовыхвоздействийнаблюдаютсяодинаковыевы) ходныесигналы.
3.Заданиеналабораторнуюработу
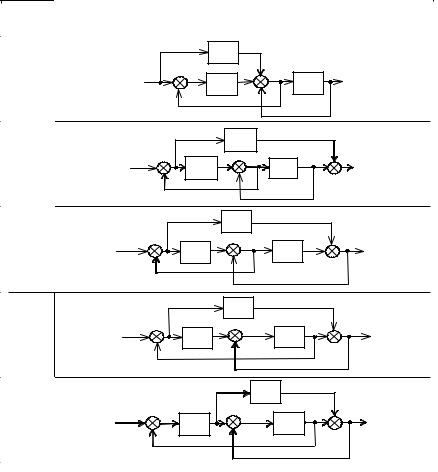
ВыполнитьпреобразованиезаданноговариантаструктурнойсхемыСАУ
вэквивалентнуюПФдвумяспособами:
–непосредственноиспользуяправилатабл.1;
–используяпредставлениеввидесигнальногографаиформулуМейсо)
на.
Вариантызаданийприведенывтабл.2.
ВкачествезвеньевW1–W3использоватьтиповыединамическиезвенья спараметрами,выбраннымивлабораторнойработе№1.
Отчетполабораторнойработедолженсодержать:
–описаниевсехэтаповпреобразованияисходнойсхемыиполучающих) сяпромежуточныхрезультатов,включающеемоделированиереакциисхе) мынатиповоевоздействие(скачок)доипослепреобразования;
15
1
212
3
4
5
6
7
Таблица 2
Варианты структур САУ
3456789 45 9
22
|
|
1 |
|
21 |
1 |
23 |
|
|
1 |
2 |
|
2 |
3 |
||
|
|
|
|
||||
|
|
|
|
22 |
|
|
|
|
1 |
|
21 |
1 |
23 |
|
1 |
1 |
|
|
2 |
|
3 |
||
2 |
|
|
|
|
|||
|
|
|
|
|
|||
|
|
|
|
22 |
|
|
|
|
1 |
|
21 |
1 |
23 |
|
1 |
1 |
2 |
|
2 |
1 |
|
||
|
|
|
3 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
22 |
|
|
|
|
1 |
|
21 |
1 |
23 |
|
1 |
1 |
2 |
|
2 |
1 |
3 |
||
|
|
|
|||||
|
|
|
|
|
22 |
|
|
|
1 |
|
|
1 |
23 |
|
1 |
|
|
|
21 |
|
|
||
1 |
2 |
|
2 |
1 |
3 |
||
|
|
|
|||||
|
|
|
|
–сигнальный граф системы, описание путей, контуров и расчет ПФ по формуле Мейсона;
–схемы экспериментов в Simulink MatLab и протокол команд MatLab.
–графики переходных процессов при подаче на вход исходной и эквивалентной схемы типовых тестирующих воздействий воздей) ствий (импульс, скачок, синусоида).
16

Лабораторная работа №3
ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ДИНАМИЧЕСКИХ ЗВЕНЬЕВ
1. Методические указания
Сущность метода частотных характеристик заключается в том, что на вход исследуемой системы подается гармонический сигнал (си) нусоидальные колебания) в широком диапазоне частот. Реакция си) стемы при разных частотах позволяет судить о ее динамических свой) ствах.
Пусть входной сигнал системы имеет амплитуду a и частоту ω, т. е. описываетсяформулой
x = asin(ωt).
Выходной сигнал будет иметь амплитуду А1 и отличаться от вход) ного по фазе на величину ψ(фазовый сдвиг):
y = A1 sin(ωt +ψ).
Таким образом, можно рассчитать усиление по амплитуде
A = A1 . a
Для каждой частоты входного сигнала ωбудут свои A и ψ. Изменяя ω в широком диапазоне, можно получить зависимость
A(ω) – амплитудную частотную характеристику (АЧХ) и ψ(ω) – фазо) вую частотную характеристику (ФЧХ).
Главное достоинство метода частотных характеристик заключа) ется в том, что АЧХ и ФЧХ объекта могут быть получены экспери) ментально. Для этого необходимо иметь генератор гармонических колебаний, который подключается к входу объекта, и измеритель) ную аппаратуру для измерения амплитуды и фазового сдвига колеба) ний на выходе объекта.
Частотные характеристики САУ могут быть получены по ее ПФ W(s). Для суждения о реакции звена на синусоидальный сигнал дос) таточно исследовать его реакцию на гармонический сигнал вида [1]
x(jω) = ejωt.
Тогда выходной сигнал
y(jω) = A(ω)ej(ωt+ψ(ω)),
17

и частотная ПФ
W(jω) = y(jω) = A(ω)ejψ(ω). x(jω)
Формально для получения частотной ПФ надо сделать в W(s) под) становку s = jω , и тогда полученная W(jω) является комплексным выражением, которое можно представить в виде:
W(jω) = a1(ω) + jb1(ω) . a2 (ω) + jb2(ω)
Для нахождения вещественной и мнимой частей частотной пере) даточной функции необходимо домножить числитель и знаменатель на сопряженную знаменателю величину, а затем провести разделе) ние:
W(jω) = |
a1(ω) + jb1(ω) |
= |
(a1(ω) + jb1(ω)) (a2 (ω) − jb2 (ω)) |
= |
|||||||||||||||||||||
a (ω) + jb (ω) |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
(a (ω) + jb (ω)) (a (ω) − jb (ω)) |
|
|||||||||||||||||||||
|
|
|
2 |
|
2 |
|
1 |
|
|
2 |
|
|
|
2 |
|
|
2 |
|
|
|
|||||
= |
a1(ω)a2 (ω) +b1(ω)b2 (ω) |
+ j |
a2 (ω)b1(ω) −a1(ω)b2 (ω) |
= |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
a2 |
(ω) +b2 |
(ω) |
|
|
|
|
|
|
a2 |
(ω) +b2 |
(ω) |
|
||||||||||||
2 |
2 |
|
|
|
|
|
|
|
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|||||
=U(ω) + jV(ω) = A(ω) ejϕ(ω), |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a2 |
+b2 |
|
||||||
|
A(ω) = |
W(jω) |
= U2 (ω) +V2 |
(ω) = |
|
|
|
1 |
1 |
, |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a2 |
+b2 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V(ω) |
|
b |
|
|
|
|
b |
|
||||||||
ψ(ω) = arg(W(jω)) = arctg |
|
|
= arctg |
|
1 |
|
|
−arctg |
2 |
. |
|||||||||||||||
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
U(ω) |
|
a1 |
|
|
a2 |
|||||||||||
Графики функций U(ω) и V(ω) называют соответственно веще ственной и мнимой частотной характеристиками.
В практических расчетах удобно применять графики частотных характеристик, построенных в логарифмическом масштабе – лога рифмические частотные характеристики (ЛЧХ).
Логарифмическая амплитудная частотная характеристика
(ЛАЧХ) определяется следующим выражением:
L(ω) = 20 lgA(ω).
18
Логарифмической фазовой частотной характеристикой(ЛФЧХ) называется график зависимости ψ(ω), построенный в логарифмичес) ком масштабе частот.
Единицей L(ω) является децибел (дБ), а единицей логарифма часто) ты – декада. Декадой называют интервал частот, на котором частота изменяется в 10 раз. При изменении частоты в 10 раз говорят, что она измениласьнаоднудекаду.ОсьординатприпостроенииЛЧХпроводят через произвольную точку, а не через точкуω= 0. Частоте ω= 0 соответ) ствует бесконечно удаленная точка: lgω→–∞при ω→0.
Основное преимущество использования ЛЧХ заключается в том, что приближенные (асимптотические) ЛАЧХ типовых динамических звеньев изображаются отрезками прямых.
Пример. Построим ЛЧХ апериодического звена первого порядка. Передаточная функция звена
|
W (s) |
= |
|
k |
|
. |
|
|
|||
|
Ts +1 |
|
|
|
|||||||
Частотная передаточная функция |
|
|
|
|
|||||||
W(jω) = |
k |
|
|
= |
k(1−Tjω) |
, |
|||||
|
|
|
|
|
|||||||
|
|
Tjω+1 |
(Tω)2 +1 |
||||||||
U = |
k |
|
, |
V = − |
|
kTω |
. |
||||
(Tω)2 |
|
|
|
||||||||
|
+1 |
|
|
|
|
(Tω)2 +1 |
|||||
Следовательно, АЧХ описывается формулой
A(ω) = |
k |
, |
(Tω)2 +1 |
ФЧХ строится по формуле
ψ(ω) = −arctg(Tω).
ЛАЧХ апериодического звена 1)го порядка
L(ω) =20lgk −20lg (Tω)2 +1.
По этой формуле можно построить две асимптоты – прямые, к которым стремится ЛАЧХ при ω→ 0 и ω→ ∞. Так, при ω→ 0 второе слагаемое близко к нулю, и этот участок ЛАЧХ представляет собой горизонтальную прямую
L(ω) =20lgk.
19
При ω →∞получаем наклонную прямую:
L(ω) ≈ −20lg (Tω)2 +1 → −∞.
Для определения наклона этой прямой можно рассмотреть грани) цы декады:
ω= 1 и ω= 10.
T T
Изменение ЛАЧХ между этими точками:
|
10 |
2 |
|
|
1 2 |
|
|||
∆L(ω) ≈ −20lg T |
|
|
+1 |
+20lg |
T |
|
|
+1 |
≈ −20 (дБ/дек). |
|
|
||||||||
|
T |
|
|
|
T |
|
|
||
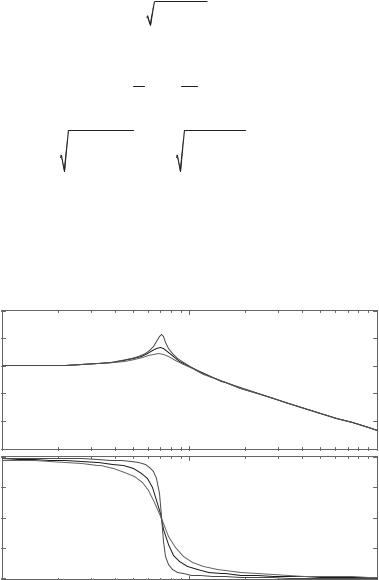
ЛЧХ часто называют диаграммами Боде.
2.Использование пакета MatLab
Впакете MatLab ЛЧХ объекта, заданного с помощью ПФ, можно получить с командой bode.
|
|
|
43 |
|
|
53 |
|
8 |
|
|
|
|
|
9 |
3 |
8 |
|
7 |
|
6 |
|
5 |
|
4 |
|
153 |
|
3 |
|
2 |
|
1 |
|
143 |
|
123 |
|
|
3 |
149
3
9
8
91 3
2
1689
1673 |
|
|
6312 |
631 |
632 |
Рис. 1. Частотные характеристики динамических звеньев
20