

Министерство образования и науки Российской Федерации
Федеральное агентство по образованию
ИРКУТСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Факультет кибернетики
Кафедра Автоматизированных Систем
ОТЧЁТ
к лабораторной работе по дисциплине
«Теория оптимального управления»
|
|
|
«Настройка ПИД-регулятора» |
наименование темы
|
Выполнил |
|
АСУ-06-1 |
|
|
|
Семигузов Е.Ю. |
|
|
|
шифр группы |
|
подпись |
|
Ф.И.О. |
|
Проверил |
|
|
|
|
|
|
|
|
|
должность |
|
подпись |
|
Ф.И.О. |
Иркутск
Оглавление:
1. Цель работы. 3
2. Структурная схема исследуемой автоматической системы. 3
3. Моделирование звена с помощью метода разложения на уравнения первого порядка. 3
4. Выбор шага интегрирования Δt и величины интервала интегрирования. 4
5. Интегральный критерий оптимизации. 4
6. Вывод выражений для получения функций чувствительности. 4
7. Алгоритм оптимизации настраиваемых параметров. 5
8. Картины сходимости настраиваемых параметров. 6
9. Листинг фрагмента программы, относящегося к моделированию заданной автоматической системы. 7
10. Зависимости с выводом о выполнении необходимого условия оптимальности. 12
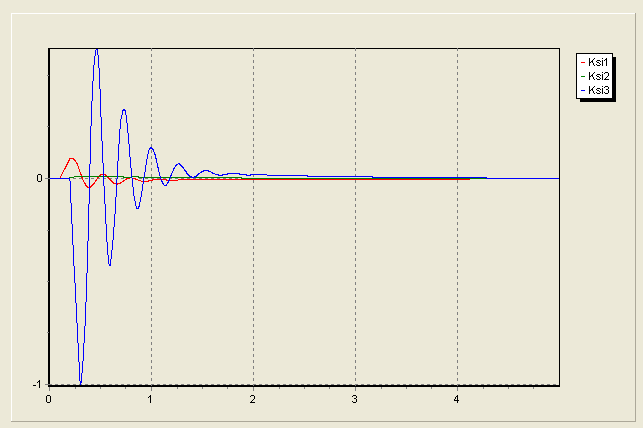
11. Зависимости . 13
12. Графики переходных процессов в начальных и конечных точках работы алгоритма параметрической оптимизации. 14
13. Список литературы. 15
Цель работы.
Ознакомление с методикой расчета оптимальных параметров регулятора при заданной структурной автоматической системы регулирования и заданных параметрах объекта регулирования по интегральным критериям качества процесса регулирования с использованием средств вычислительной техники.
Структурная схема исследуемой автоматической системы.
Объект регулирования:
![]()
Значения параметров звена: k = 1; T = 1; τ=0,1. Где T— постоянная времени, k – постоянный коэффициент, τ – время запаздывания. Данный объект можно представить в виде 2-х последовательно соединенных звеньев: сам объект и звено запаздывания

Далее подключаем ПИД-регулятор и охватываем звенья обратной связью. Структурная схема примет вид:

Моделирование звена с помощью метода разложения на уравнения первого порядка.
Запишем дифференциальное уравнение
![]()
![]()
(*)
![]()
Дифференциальное уравнение (*) может быть представлено в виде совокупности линейных дифференциальных уравнений первой степени
![]() ,
,
![]() .
.
Составим
выражения для определения коэффициентов
![]() .
.
![]()
![]()
![]()
![]()
Подставив полученные коэффициенты получим:
![]() ,
,
![]() .
.
Выбор шага интегрирования Δt и величины интервала интегрирования.
Шаг интегрирования и величина интервала интегрирования были выбраны экспериментальным путем:
Δt = 0,002
L = 8.
Интегральный критерий оптимизации.
– модульный критерий качества оптимизации.
Алгоритм оптимизации – метод наискорейшего спуска.
Вывод выражений для получения функций чувствительности.
Функция
чувствительности характеризует влияние
![]() го
настраиваемого параметра на выходную
координату объекта регулирования. По
определению: . Учитывая, что выходной
сигналy(t)
получается при подаче сигнала управленияu(t) на вход
объекту регулированияWоб(p).
Поэтому можем записать:
го
настраиваемого параметра на выходную
координату объекта регулирования. По
определению: . Учитывая, что выходной
сигналy(t)
получается при подаче сигнала управленияu(t) на вход
объекту регулированияWоб(p).
Поэтому можем записать:
![]()
Возьмем частные производные по каждому из настраиваемых параметров qj:
![]()
![]()
Учитывая определение функции чувствительности, получим:
![]()
![]()
Алгоритм оптимизации настраиваемых параметров.
1. Задание начальных qj.
2. Вычисление при заданных qjкритерия качества (всегда), функций чувствительности и составляющих градиента (только в случае неудачного предыдущего шага).
3. Если критерий качества уменьшился, то изменение шага оптимизации в 1,2 раза и на следующем шаге не вычисляются функции чувствительности и составляющие градиента, в противном случае – возвращаются предыдущие значения qj, шаг оптимизации меняется в 0,5 раз, а на следующем шаге вычисляются функции чувствительности и составляющие градиента.
4. Вычисление новых qjпо формуле:

5. Если выполнилось условие останова, то заканчиваем работу программы, иначе на пункт 2.