9 Еδ. Типовые звенья сау. Дифференцирующее звено
Для расчета различных систем автоматического управления они обычно разбиваются на динамические звенья. Под динамическим звеном понимают устройство любой физической природы и конструктивного оформления, но описываемое определенным дифференциальным уравнением.
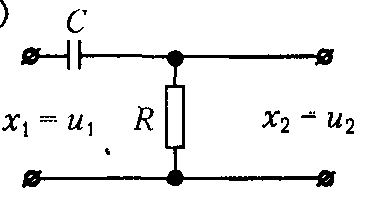
Х1-входная величина, х2-выходная.
Типовые звенья:
-усилительное звено
-интегрирующее звено
-колебательное звено
-форсирующее звено (инерционно-диффер.ИС
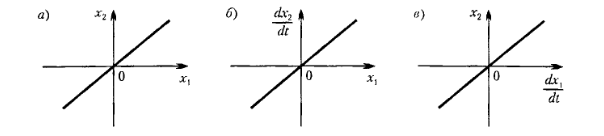
Статическая характеристика любого звена может быть изображена прямой линией
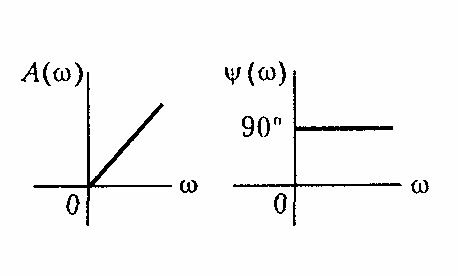
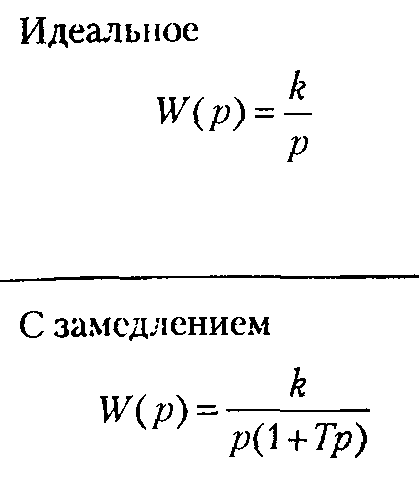
Идеальное
дифференцирующее звено. Звено описывается
уравнением
![]() Передаточная
функция звена W(p) = kp
Передаточная
функция звена W(p) = kp
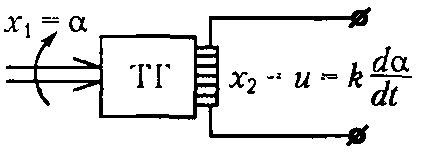 Единственным
идеальным дифференцирующим звеном,
является тахогенератор постоянного
тока, если в качестве входной величины
рассматривать угол поворота его ротора
а, а в качестве выходной — э. д. с. якоря
е.
Единственным
идеальным дифференцирующим звеном,
является тахогенератор постоянного
тока, если в качестве входной величины
рассматривать угол поворота его ротора
а, а в качестве выходной — э. д. с. якоря
е.
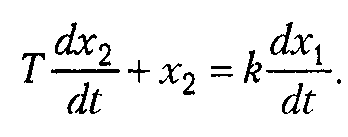
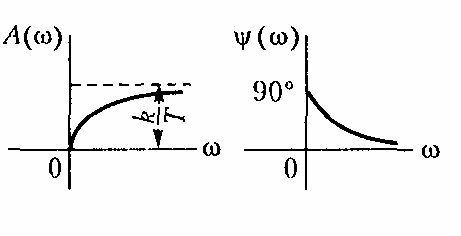
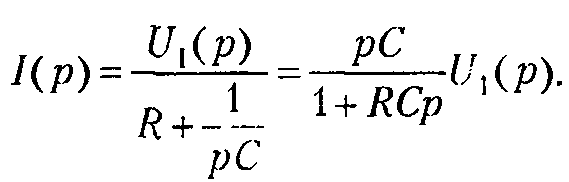
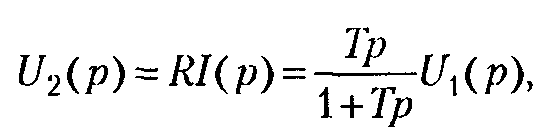
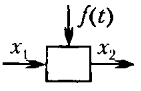
Дифференцирующее звено с замедлением описывается уравнением

10. Типовые звенья сау. Усилительное звено
Для расчета различных систем автоматического управления они обычно разбиваются на динамические звенья. Под динамическим звеном понимают устройство любой физической природы и конструктивного оформления, но описываемое определенным дифференциальным уравнением.
Х1-входная величина, х2-выходная.
Каждое звено имеет следующие динамические характеристики: уравнение состояния, передаточную и переходную функции, частотные характеристики
Усилительное безынерционное звено (пропорциональное, нулевого порядка) – наиболее просто звено САУ, без запаздывания. Статические и динамические уравнения этого звена совпадают:
![]()
Передаточная функция
![]() где
К – коэффициент усиления звена
где
К – коэффициент усиления звена
Примером такого звена являются механический редуктор, безынерционной (широкополосный) усилитель, делитель напряжения и т. п. Многие датчики сигналов, как, например, потенциометрические датчики, индукционные датчики, вращающиеся трансформаторы и т. п., также могут рассматриваться как безынерционные звенья.

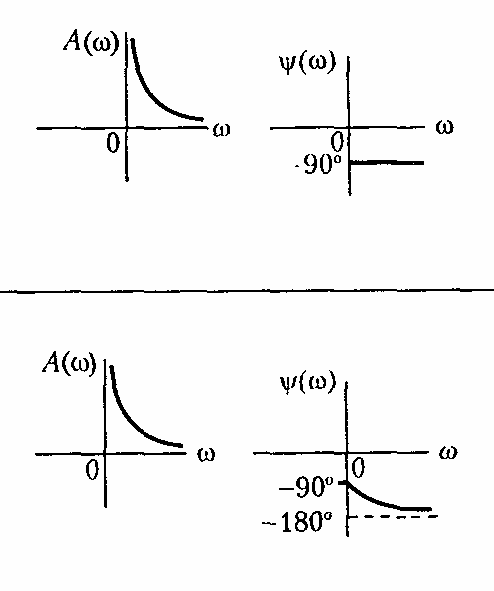
АЧХ и ФЧХ:
П ереходная
функция
ереходная
функция
11. Интегрирующее звено
Для расчета различных систем автоматического управления они обычно разбиваются на динамические звенья. Под динамическим звеном понимают устройство любой физической природы и конструктивного оформления, но описываемое определенным дифференциальным уравнением.
Х1-входная величина, х2-выходная.
Каждое звено имеет следующие динамические характеристики: уравнение состояния, передаточную и переходную функции, частотные характеристики
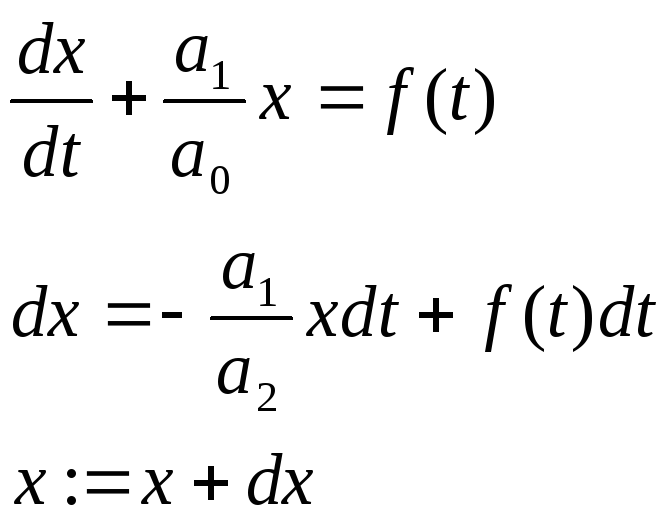
Аналоговый интегратор:
![]()
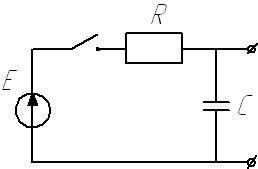
Схема решения этого диф. ур-ния

Схема, которая автоматически решает диф.ур.:
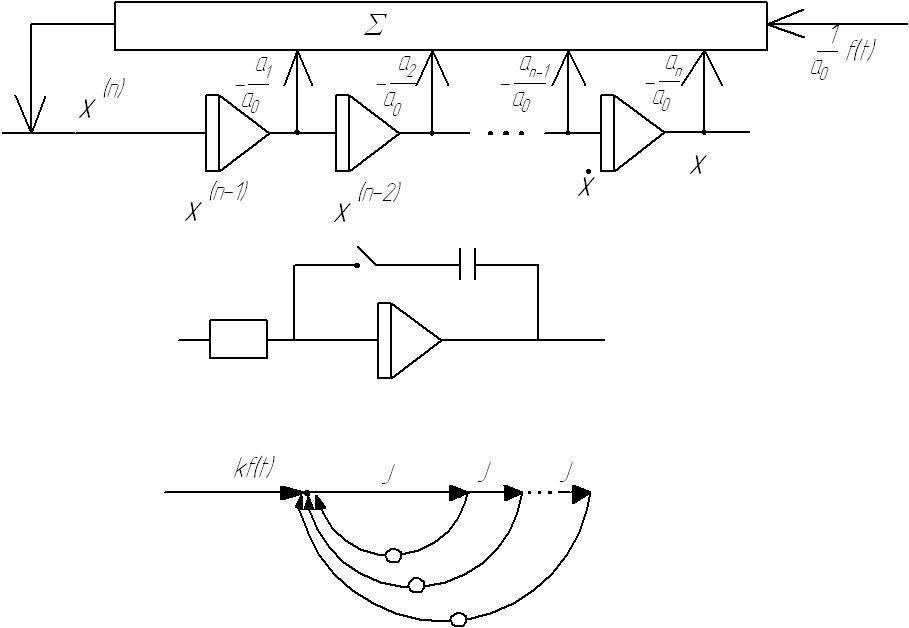
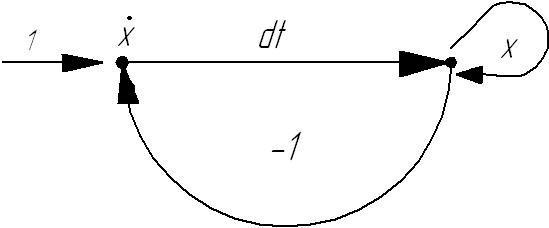
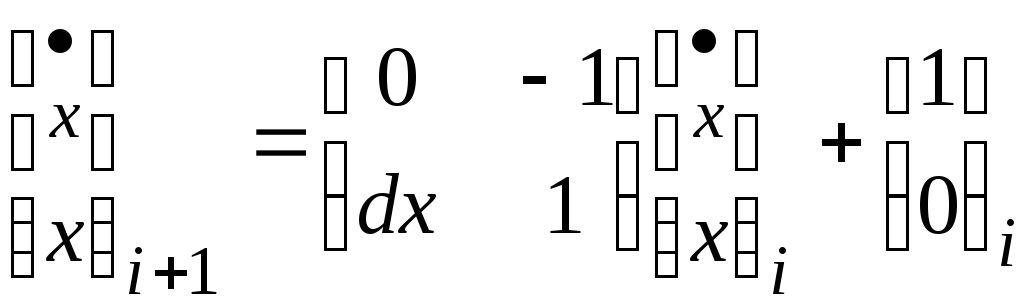
Ч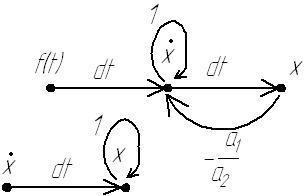 исленный
интегратор.
исленный
интегратор.

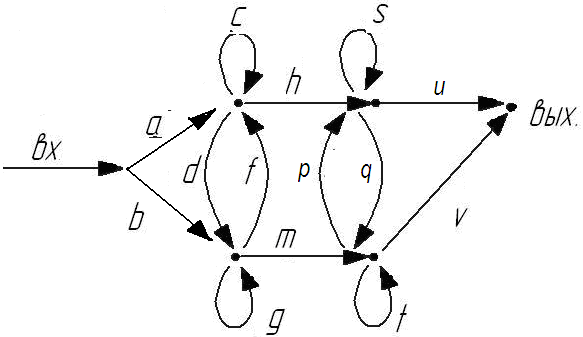
12. Топологическая формула Мезона
![]()
Δli – передачи всех прямых путей от входа к выходу
Δi – веса этих путей (определители)
Δг – определитель графа (вес)
![]()
![]() -передача
всех контуров
-передача
всех контуров
только те контура, которые не касаются данного прямого пути
Определители пути – это определитель подграфа, который можно получить из данного графа после исключения данного прямого пути вместе с рёбрами, которые этого пути касаются. Прямой путь – это путь дважды не проходящий одной вершины.
![]()