

РГР / ТАУ практика / 5 Точность,астатизм.бр
.docМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОСИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНГИЮ
ЮЖНЫЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ
ЮЖНОГО ФЕДЕРАЛЬНОГО УНИВЕРСИТЕТА В
г. ТАГАНРОГЕ
Факультет автоматики и вычислительной техники
Кафедра систем автоматического управления__
© Тесленко О.А.
Практическое занятие 5
Дисциплина «Основы теории управления»
Тема: Точность систем автоматического управления. астатизм
Таганрог 2010г
Проработать материалы лекции Л10.
Оценка точности работы САУ
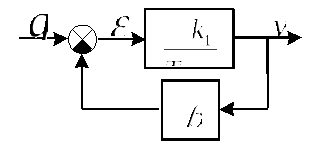
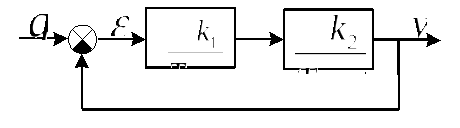
Рассмотрим пример оценки точности работы системы управления двигателем постоянного тока (ДПТ). Структурная схема САУ показана на рис.1.
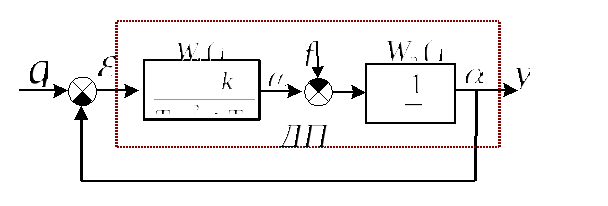
Рис.1. Структурная схема САУ ДПТ
САУ
состоит из ДПТ и понижающего редуктора,
с общим коэффициентом усиления
![]() .
Электромагнитная и электромеханическая
постоянные времени двигателя соответственно
равны:
.
Электромагнитная и электромеханическая
постоянные времени двигателя соответственно
равны:
![]() ,
,
![]() .
Двигатель и редуктор охвачены единичной
отрицательной ОС. На вход САУ действует
задающее воздействие
.
Двигатель и редуктор охвачены единичной
отрицательной ОС. На вход САУ действует
задающее воздействие
![]() ,
это полезный сигнал, который требуется
отработать с определенной точностью,
и возмущающее воздействие (помеха)
,
это полезный сигнал, который требуется
отработать с определенной точностью,
и возмущающее воздействие (помеха)![]() ,
который также влияет на точность работы
системы управления.
,
который также влияет на точность работы
системы управления.
Оценим
точность отработки сигнала задания
![]() и
и
![]() ,
и детерминированного возмущающего
воздействия
,
и детерминированного возмущающего
воздействия
![]() .
Для этого необходимо рассчитать
установившуюся ошибку работы САУ
.
Для этого необходимо рассчитать
установившуюся ошибку работы САУ
![]() и
и
![]() [Лекция 10]. Выполнить это можно разными
способами.
[Лекция 10]. Выполнить это можно разными
способами.
-
путем моделирования работы САУ.
-
Используя метод коэффициентов ошибки.
моделирование работы САУ
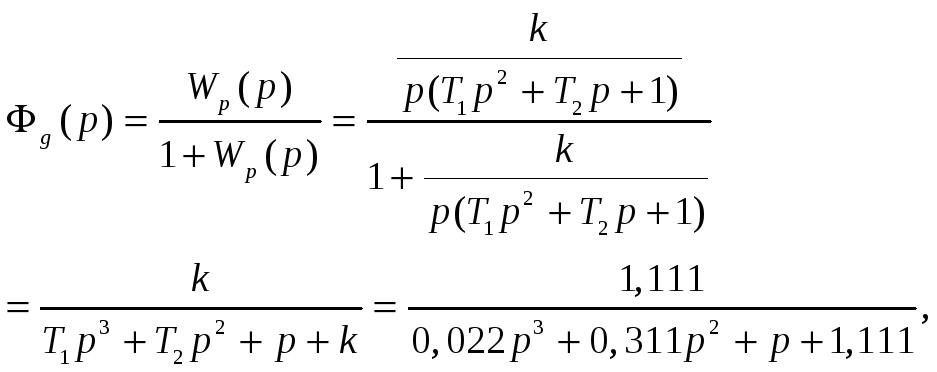
Для
того чтобы смоделировать работу САУ
необходимо определить следующие
передаточные функции:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,(1)
,(1)
 (2)
(2)
 (3)
(3)
 (4)
(4)
 . (5)
. (5)
Поскольку
![]() ,
то дифференциальное уравнение, описывающее
динамическое поведение САУ, согласно
(2), имеет вид
,
то дифференциальное уравнение, описывающее
динамическое поведение САУ, согласно
(2), имеет вид
![]() . (6)
. (6)
Решением
уравнения (6), с учетом
![]() и
и
![]() будут соответственно функции
будут соответственно функции
![]() , (7)
, (7)
![]() . (8)
. (8)
ошибка работы системы управления имеет вид
 (9)
(9)
 (10)
(10)
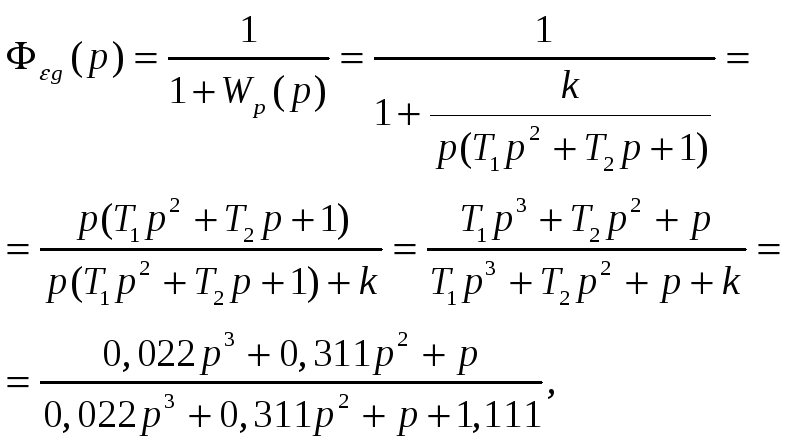
Установившаяся
ошибка системы управления определяется
после окончания переходного процесса,
т.е. при
![]() в (9) и (10), и соответственно равна
в (9) и (10), и соответственно равна
![]() . (11)
. (11)
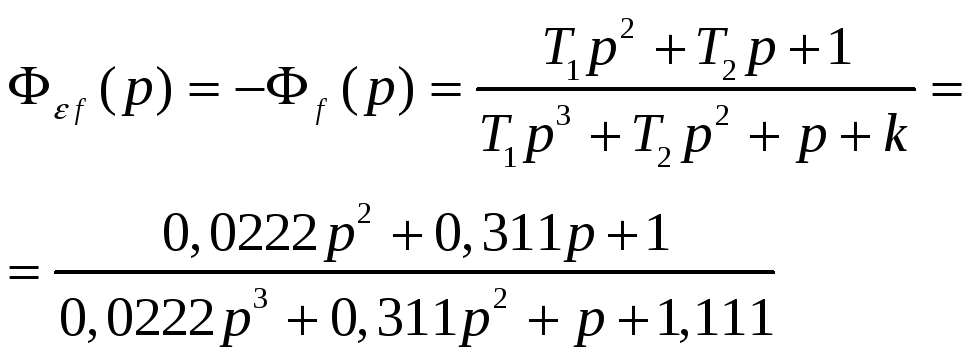
Аналогичным
образом определяется установившаяся
ошибка системы управления от возмущающего
воздействия
![]() .
В этом случае необходимо рассматривать
передаточную функцию для ошибки по
возмущению
.
В этом случае необходимо рассматривать
передаточную функцию для ошибки по
возмущению
![]() ,
решением будет выражение
,
решением будет выражение
![]() . (12)
. (12)
Суммарная ошибка определяется сложением (11) и (12) и равна:
-
при отработке
 и
и
![]() , (13)
, (13)
-
при отработке
 и
и
![]() . (14)
. (14)
Рассмотрим второй способ, используя метод коэффициентов ошибки
Для этого воспользуемся формулой
 (15)
(15)
 (16)
(16)
Коэффициенты
ошибки
![]() и
и
![]() в (15), (16) можно определить тремя способами
в (15), (16) можно определить тремя способами
-
Разложив соответствующую передаточную функцию в ряд Тейлора.
-
Воспользовавшись рекуррентной формулой.
-
Разделив полином числителя соответствующей передаточной функции на полином знаменателя.
Первый способ
Рассчитаем коэффициенты ошибки
 (17)
(17)
 (18)
(18)
 (19)
(19)
 (20)
(20)
Подставим
(18), (19), (20) в (15) с учетом
![]() ,
получим
,
получим
 . (21)
. (21)
Подставим
(18), (19), (20) в (15) с учетом
![]() ,
получим
,
получим
 (22)
(22)
Порядок
астатизма системы по задающему воздействию
равен
![]() ,
т.е. постоянные воздействия, вне
зависимости от уровня входного сигнала,
отрабатываются системой управления с
нулевой ошибкой. а
сигналы, содержащие скоростную
составляющую, с постоянной ошибкой. В
этом случае, величина ошибки зависит
от скорости изменения входного сигнала.
,
т.е. постоянные воздействия, вне
зависимости от уровня входного сигнала,
отрабатываются системой управления с
нулевой ошибкой. а
сигналы, содержащие скоростную
составляющую, с постоянной ошибкой. В
этом случае, величина ошибки зависит
от скорости изменения входного сигнала.
Рассчитаем коэффициенты ошибок для возмущающего воздействия.
 (23)
(23)
 (24)
(24)
 . (25)
. (25)
Подставим
(24), (25), в (16) с учетом
![]() ,
получим
,
получим
![]() (26)
(26)
Порядок
астатизма системы по возмущающему
воздействию равен
![]() ,
т.е. любой постоянный возмущающий сигнал
приведет к возникновению ошибки в работе
САУ. Если же
,
т.е. любой постоянный возмущающий сигнал
приведет к возникновению ошибки в работе
САУ. Если же
![]() будет содержать скоростную составляющую,
то ошибка в системе управления станет
увеличиваться после окончания переходного
процесса.
будет содержать скоростную составляющую,
то ошибка в системе управления станет
увеличиваться после окончания переходного
процесса.
пример.
Предположим, что сигнал возмущения
имеет вид
![]() ,
тогда, согласно (26)
,
тогда, согласно (26)

Длительность
переходного процесса системы
![]() ,
следовательно
,
следовательно
![]() .
При увеличении длительности процесса
управления, например до
.
При увеличении длительности процесса
управления, например до
![]() ,
ошибка от возмущающего воздействия
увеличится и станет равной
,
ошибка от возмущающего воздействия
увеличится и станет равной
![]() .
.
Поскольку
системы управления, в рассматриваемом
случае является системой стабилизации,
работающей длительное время непрерывно,
то ошибка
![]() будет неограниченно возрастать, что
может привести к сбою в работе системы
управления.
будет неограниченно возрастать, что
может привести к сбою в работе системы
управления.
Второй способ
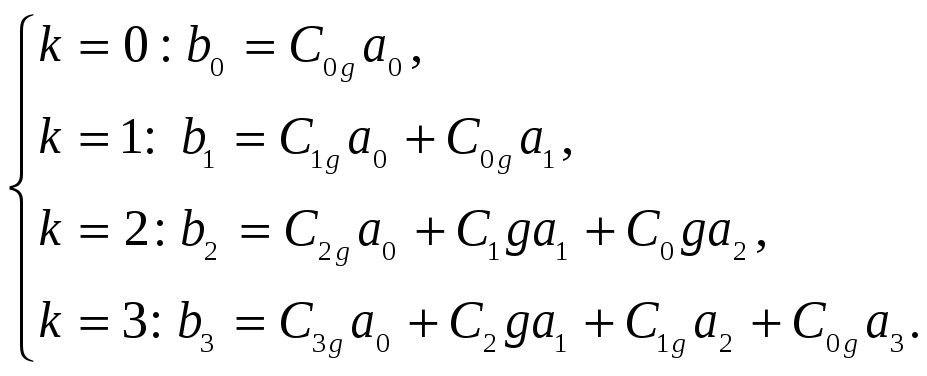
Воспользовавшись рекуррентной формулой (5.11).
![]() ,
,![]() ,
,
при
![]() и
и
![]() ,
при
,
при
![]() . (27)
. (27)
Введем в передаточную функцию для ошибки по задающему воздействию соответствующие обозначения
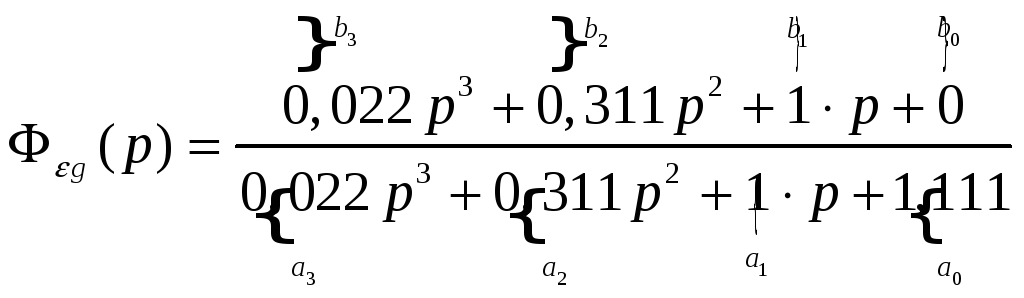 ,
,
тогда
изменяя
![]() от 0 до
от 0 до
![]() ,
получим систему уравнений
,
получим систему уравнений
Если
в полученной системе уравнений учесть
численные значения
![]() и
и
![]() из
из
![]() ,
то можно вычислить искомые коэффициенты
ошибок следующим образом.
,
то можно вычислить искомые коэффициенты
ошибок следующим образом.
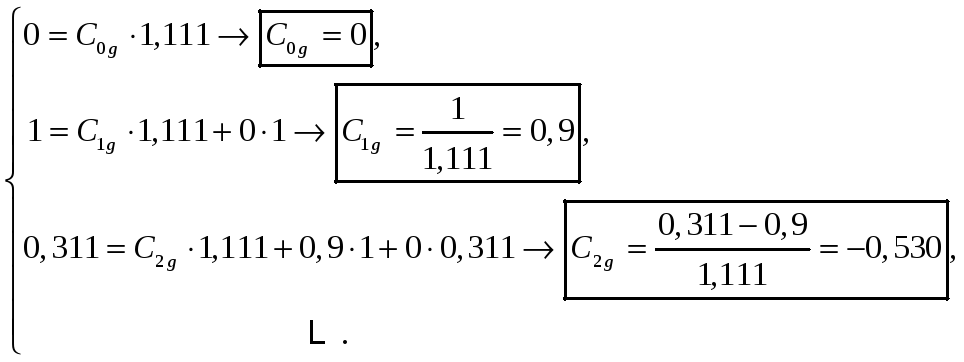 Результат
аналогичен (18), (19), (20).
Результат
аналогичен (18), (19), (20).
Вычислите
коэффициенты
![]() ,
,
![]() вторым способом самостоятельно.
вторым способом самостоятельно.
Третий способ
Перепишем
полиномы числителя и знаменателя
![]() в порядке возрастания степени
в порядке возрастания степени
![]() .
.
![]() .
.
И разделим полином числителя на полином знаменателя
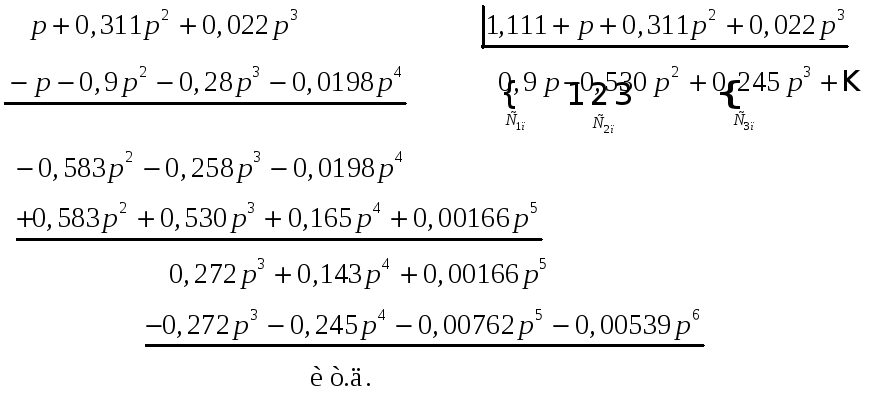 Результат
аналогичен (18), (19), (20).
Результат
аналогичен (18), (19), (20).
вычислите
коэффициенты
![]() ,
,
![]() третьим способом самостоятельно.
третьим способом самостоятельно.
Графики
переходных процессов, при отработке
задающего воздействия
![]() и
и
![]() представлены на рис.2 и рис.3, соответственно.
представлены на рис.2 и рис.3, соответственно.

Рис.2.
Реакция САУ на
![]()

Рис.3.
Реакция САУ на
![]()
Домашнее задание
-
Определите
 ,
используя все методы, (не менее двух-трех
коэффициентов разложения). Нарисуйте
качественный график
,
используя все методы, (не менее двух-трех
коэффициентов разложения). Нарисуйте
качественный график
 .
Определите
.
Определите
 – порядок астатизма системы
– порядок астатизма системы
где
![]() ,
,
![]() .
.
-
Определите
 ,
используя все методы, (не менее двух-трех
коэффициентов разложения). Нарисуйте
качественный график
,
используя все методы, (не менее двух-трех
коэффициентов разложения). Нарисуйте
качественный график
 .
Определите порядок астатизма системы
.
Определите порядок астатизма системы

где
![]() ,
,
![]() .
.
-
Определите
 ,
используя все методы, (не менее двух-трех
коэффициентов разложения). Нарисуйте
качественный график
,
используя все методы, (не менее двух-трех
коэффициентов разложения). Нарисуйте
качественный график
 .
Определите порядок астатизма системы
.
Определите порядок астатизма системы
 для САУ п.2., если на вход системы подается
задающий сигнал
для САУ п.2., если на вход системы подается
задающий сигнал
 .
.