

Формула, характеризующая блок умножения имеет вид:
∆V0*Sп1+∆S0*V1=∆b;
Отсюда, получаем линеаризованный блок умножения:
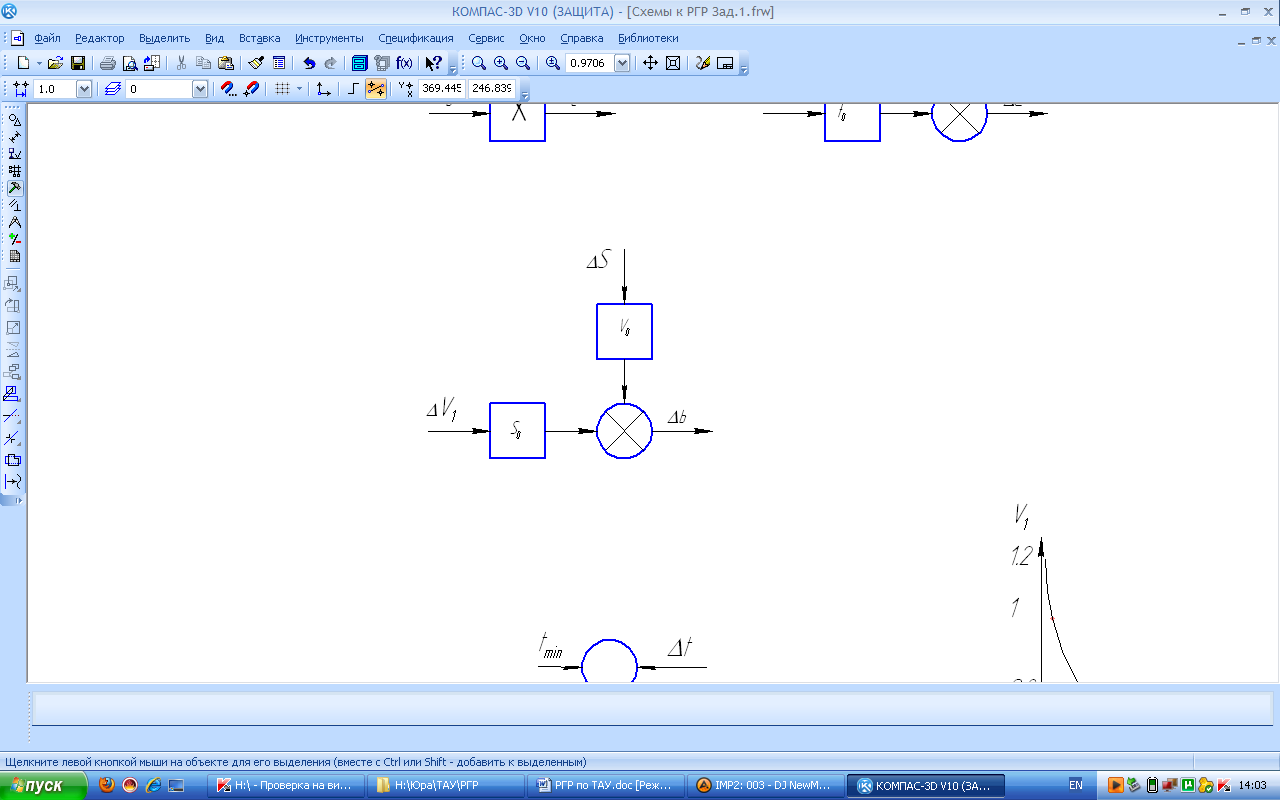
Рисунок 3.6 – Линеаризованная схема блока умножения 1.
Линеаризируем второй блок умножения:
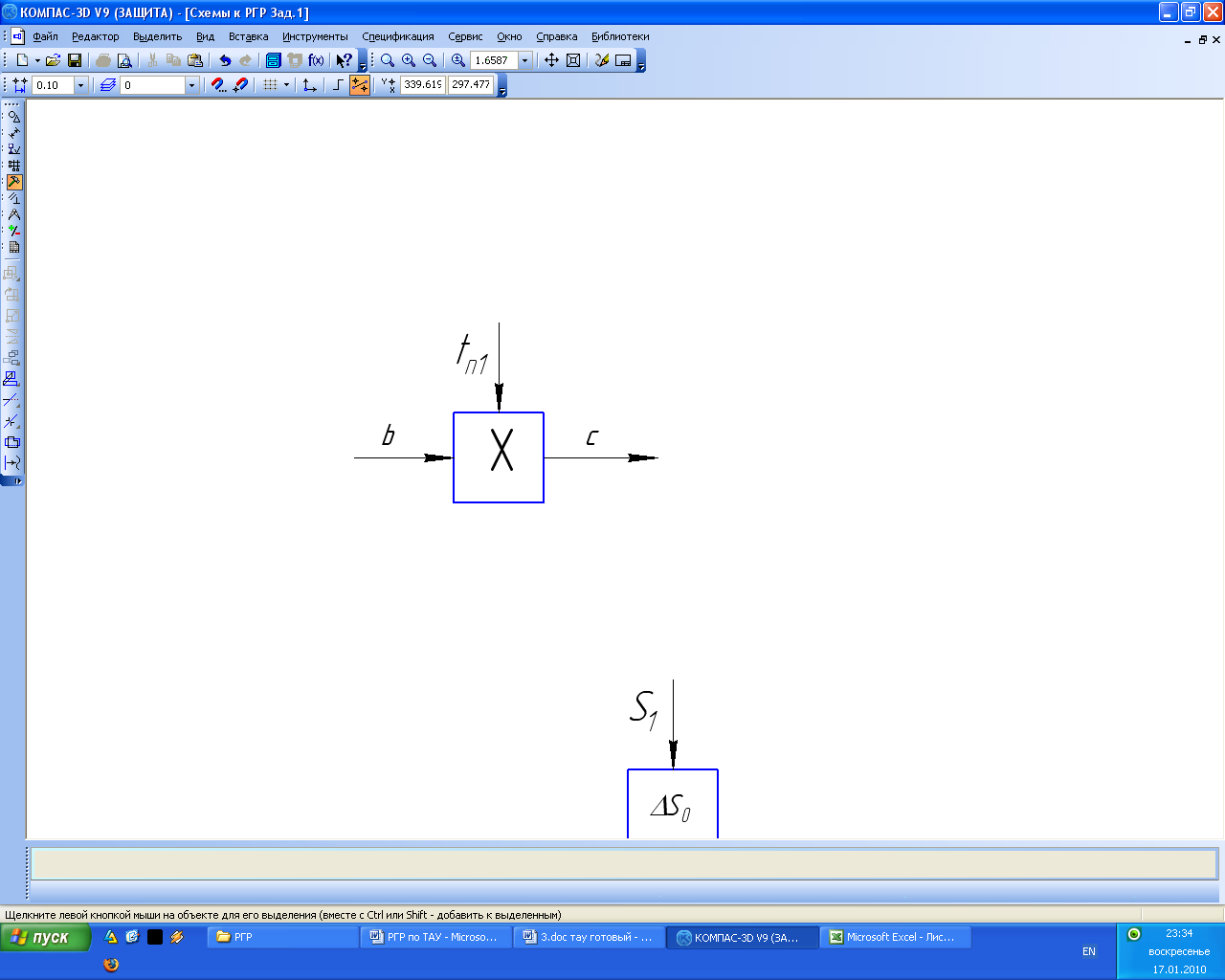
Рисунок 3.7 – Схема блока умножения 2.
Формула, характеризующая блок умножения имеет вид:
∆b0*tп1+∆t0*b1=∆c;
Получаем линеаризованный блок умножения
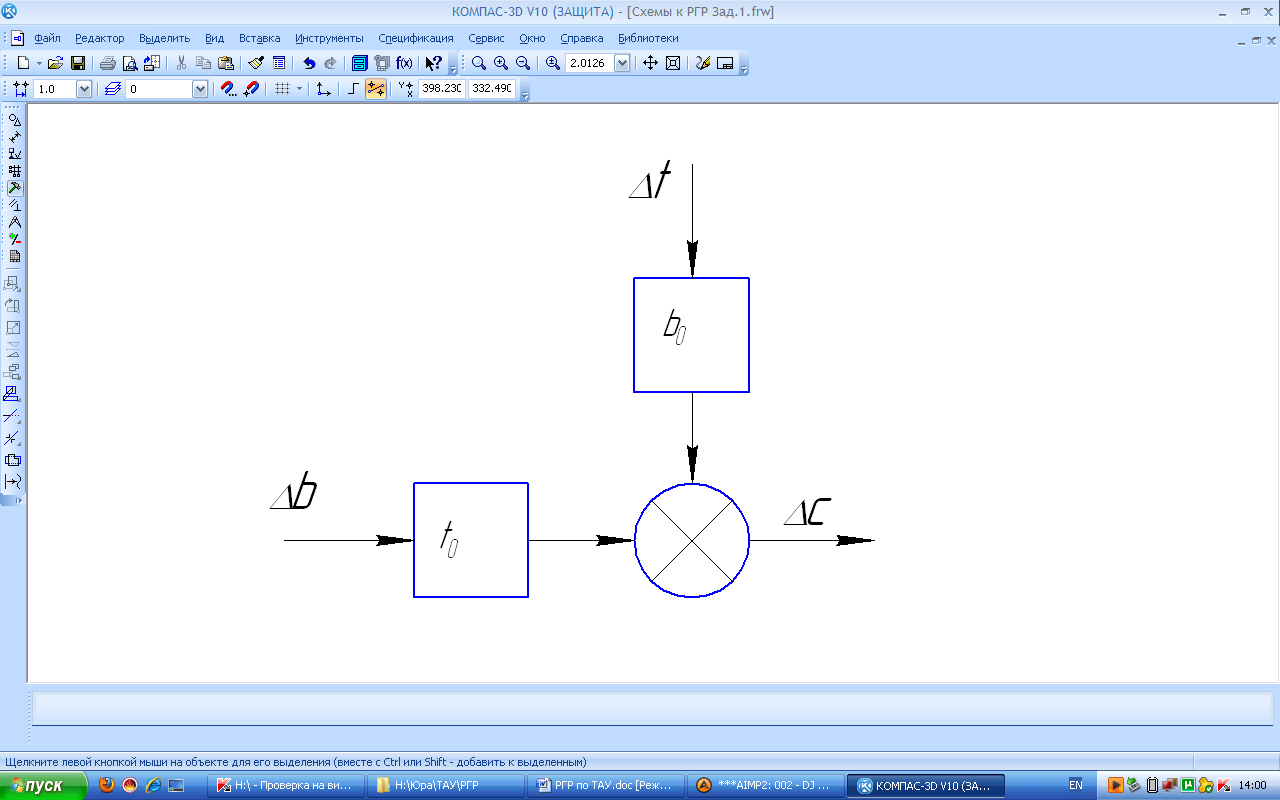
Рисунок 3.8– Линеаризованная схема блока умножения 2.
Соединив все линеаризованные блоки, получили линеаризованную функциональную схему процесса резания как объекта управления:

Рисунок 3.9 – Линеаризованная схема процесса резания как объекта управления.
4 Разработка структурной схемы САР
Изображение системы регулирования в виде совокупности динамических звеньев с указанием связей между ними и направления прохождения сигнала носит название структурной схемы.
С
Wку(p) kус Wду(p) Wпэ(p) Wд(p) Wпу(p) Wпр(p)











 труктурная
схема САР.
труктурная
схема САР.
Uку 10В Uн w Sz Px
Uз
Uос
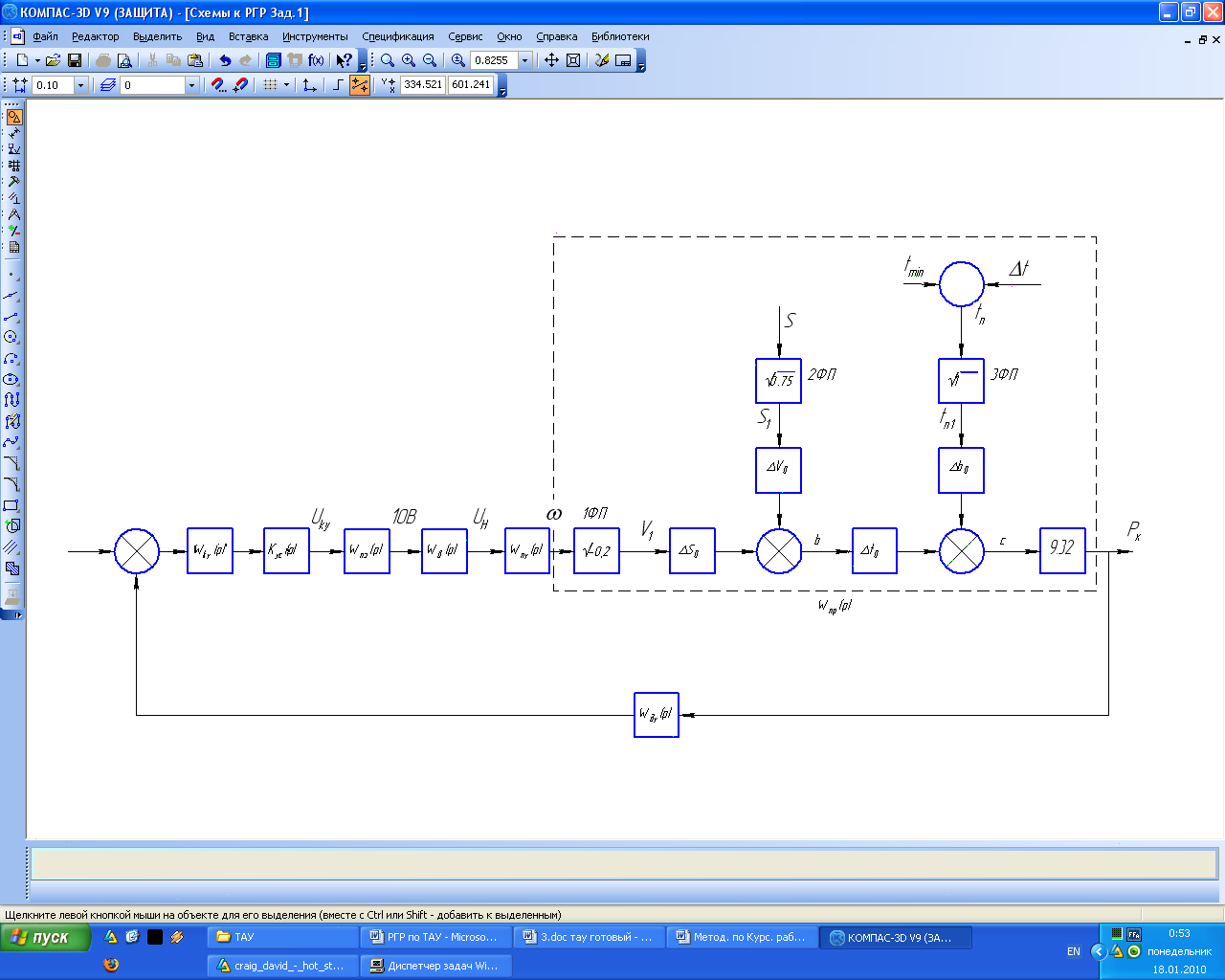
Рисунок 4.1 – Структурная схема САР.
Список литературы
1. Бесекерский В.А. «Сборник задач по теории автоматического регулирования и управления» - М.: Наука, 1978г.
2. Топчеев Ю.И. «Атлас для проектирования систем автоматического регулирования» - М.: Машиностроение, 1989г.
3. Копылов И. П. Справочник по электрическим машинам, том 1. Москва Энергоатомиздат, 1988.
4. А.А.Воронов «Основы теории автоматического регулирования и управления», М., Высшая школа, 1997.
Изм.
Лист
№докум. Подп. Дата Лист







