

РГР / Моделирование - расчетка
.docВведение
Совершенствование технологии и повышение производительности труда относятся к важнейшим задачам технического прогресса. Эффективное решение этих задач возможно при внедрении систем автоматического регулирования и управления как отдельными объектами и процессами, так и производством в целом. Поэтому изучение основ автоматического регулирования и управления предусматривается в настоящее время при подготовке студентов практически всех инженерных специальностей.
В результате изучения дисциплины «Теория управления» студент должен уметь анализировать производственный процесс с целью его автоматизации, определения управляемых и управляющих параметров, выбора отдельных элементов и устройств системы автоматического управления (САУ) объектом. Умение разделять САУ на основные функциональные элементы и составлять функциональные и структурные схемы способствует ясности представлений о физических процессах, происходящих в системе, и имеет большое значение для дальнейшего исследования и расчета систем.
Целью расчётно-графической работы по дисциплине «Моделирование процессов и объектов» является закрепление теоретических знаний и овладение навыками анализа и синтеза систем автоматического управления объектами на примере металлорежущих станков и промышленных роботов. При выполнении работы приобретается опыт разработки и расчета САУ производственными процессами и отдельными объектами в машиностроении.
Вариант 3 - Система автоматического управления приводом фрезерного станка с ЧПУ
САУ предназначена для стабилизации, либо изменения силы резания при фрезеровании за счет управления приводом подач.
Фрезерный станок с ЧПУ предназначен для обработки различных сложных поверхностей деталей машин.
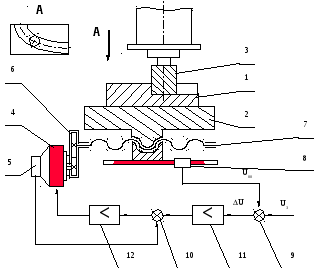
Деталь 1 устанавливается на столе 2 которому сообщаются движения подачи в двух взаимно перпендикулярных направлениях для формирования фрезой 3 требуемой формы паза (см. вид А). На рисунке показан только один
привод стола 2. Он состоит из приводного двигателя 4 постоянного тока с тахогенератором 5, редуктора 6 и винта 7. Кроме того, в систему автоматического управления входят также преобразователь перемещения 8, сравнивающие устройства 9 и 10, усилитель 11 и тиристорный
преобразователь 12.
САУ работает следующим образом. Сигнал, вырабатываемый системой ЧПУ, через цифро-аналоговый преобразователь (на схеме не показан) в виде напряжения UЗ поступает на вход сравнивающего устройства 9. На другой вход сравнивающего устройства 9 поступает сигнал UО преобразователя перемещения 8. Напряжение U ошибки через усилитель 11 поступает на вход сравнивающего устройства 10. На другой вход устройства 10 поступает напряжение, вырабатываемое тахогенератором 5. Таким образом, напряжение на входе тиристорного преобразователя 12 определяет скорость вращения двигателя 4, а следовательно, и величину подачи стола 2.
Система автоматического управления приводом подачи сообщает столу 2 и детали 1 движение по одной из управляемых координат в соответствии с напряжением UЗ задания. Аналогичным образом работает привод подачи по другой координате. В результате сложного движения детали 1 фрезой 3 формируется требуемый контур.
В качестве объекта управления в САУ приводом входят процесс резания и замкнутая технологическая система станка.
Значения данных приведены в таблице ниже.
|
ТЭУ, с |
КЭУ |
ТТП, с |
КТП |
КР |
КТГ, Вс |
К n, В/мм |
Тя, с |
ТМ, с |
KД 1/сВ |
|
|
0 |
80 |
0,04 |
15 |
0,01 |
0,05 |
4,5 |
0,07 |
0,29 |
2,4 |
|
|
ТР, с |
CР |
К |
SМ |
|
z |
Wо, 1/с |
|
С, Н/мм |
|
|
|
0,00 |
800 |
0,31 |
0,02 |
0,05 |
10 |
- |
- |
105 |
|
|
Примечание : глубина фрезерования 20 мм , угловая скорость фрезы 630 – 1/мин.
Уравнения элементов систем автоматического управления
Механический редуктор
![]() или
или
![]() ,
,
где wВЫХ , aВЫХ - соответственно угловая скорость и угол поворота выходного звена редуктора ;
wВХ , aВХ - соответственно угловая скорость и угол поворота входного звена редуктора ;
КР - коэффициент передачи.
W=KP; W=0.01;
Электронный усилитель
 ,
,
где ТЭУ - постоянная времени электронного усилителя, с ;
UВЫХ - выходное напряжение, В ;
UВХ - входное напряжение, В ;
КЭУ - коэффициент усиления .
WЭУ= KЭУ/(TЭУ+1);WЭУ=80;
Тиристорный усилитель-преобразователь
 ,
,
где ТТП - постоянная выхода тиристорного преобразователя, с ;
UВЫХ - выходное напряжение, В ;
UВХ - входное напряжение, В ;
KТП - коэффициент передачи (усиления) .
Wтуп=Kтп/(Tтп+1);
Wтуп=![]()
Электродвигатель постоянного тока
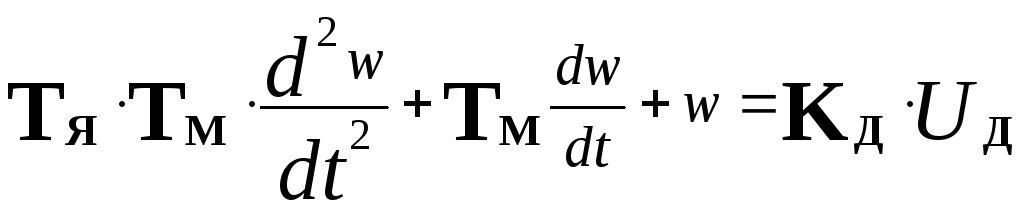 ,
,
где ТЯ - электромагнитная постоянная времени якоря, с ;
ТМ - электромеханическая постоянная двигателя, с ;
w - угловая скорость, с-1 ;
KД - коэффициент передачи электродвигателя, 1/сВ ;
UД - напряжение якоря, В.
Wдпт=![]() ;
Wдпт=
;
Wдпт=![]() ;
;
Тахогенератор
![]() ,
,
где UВЫХ - выходное напряжение тахогенератора, В ;
КТГ - коэффициент передачи, В·с ;
d/dt - угловая скорость входного вала, рад/с .
Wтг=Ктг; Wтг=0,05
Преобразователь линейного перемещения
![]() ,
,
где UВЫХ - выходное напряжение преобразователя, В ;
Кn - коэффициент передачи, В/мм ;
SВХ - входное перемещение, мм .
Wn=Kn; Wn=4,5
Структурная схема исследуемого объекта, реализованная на ЭВМ.
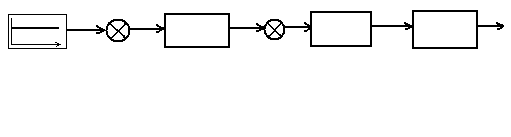














График переходного процесса системы (реализован с помощью программы “SIAM”)
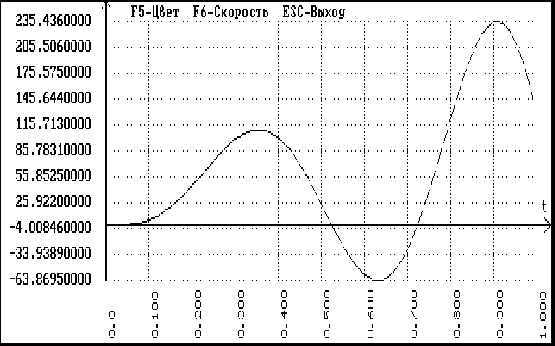
Из графика видно, что система неустойчива. Для того чтобы система была устойчивой, изменим параметры элементов системы подвергающихся настройке и время регулирования.
График переходного процесса системы после изменения параметров элементов системы подвергающихся настройке
(реализован с помощью программы “Mathcad”)
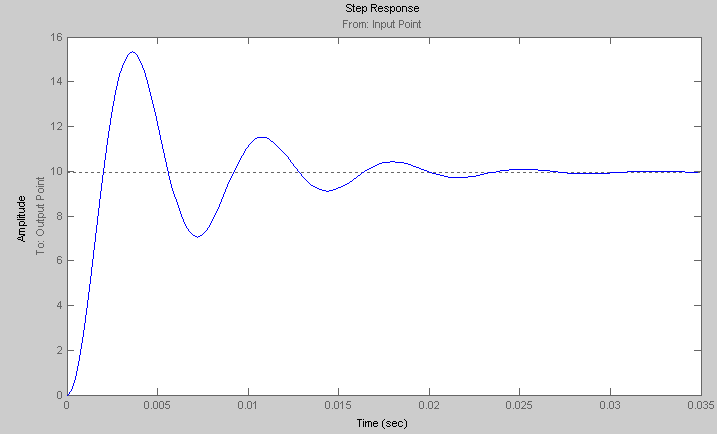
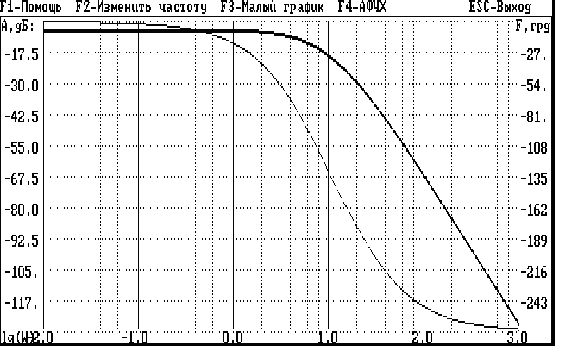
График ЛЧХ.
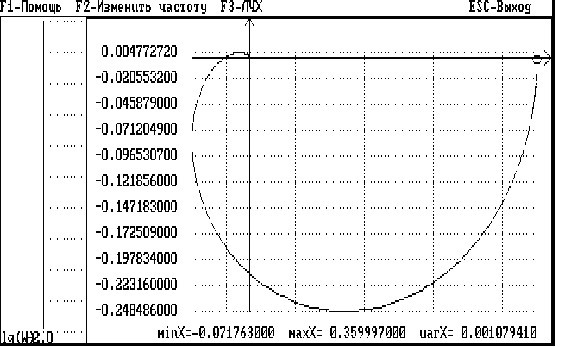
График АФЧХ.
Показатели качества системы.
-
Максимальное перерегулирование:

-
Время регулирования: tP:=0.03 c.
-
Число колебаний NP регулируемой величины в течение времени tP: NP:=4
-
Собственная частота колебаний системы:
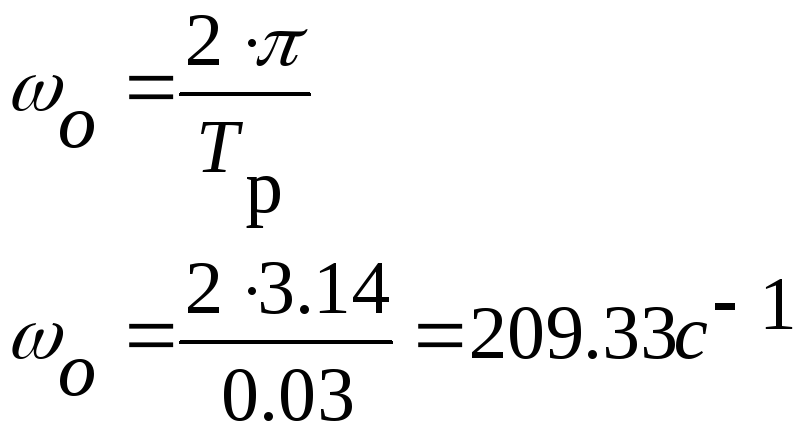
-
Логарифмический декремент затухания системы d0:
![]()
-
Максимальная скорость отработки регулируемой величины:
