

Шина адреса.
При формировании
ША необходимо анализировать наличие
режима ПДП. Если ПДП не используется,
то в качестве формирователя можно
использовать однонаправленные буферные
элементы или обычные интегральные
схемы. При наличии большого числа
периферийных устройств наиболее
нагруженными разрядами являются разряды,
обеспечивающие обращение к внутренним
регистрам периферийных БИС. Как правило
это разряды А0 и А1. Поэтому особенно
тщательно нужно анализировать нагрузку
на эти разряды. Так как адрес внешнего
устройства дублируется в старшем и
младшем байтах, то можно не использовать
формирователь А0, А1, а распределить
нагрузку между разрядами (А0 А1)![]() (A8
A9). Это справедливо для К580. В тех случаях,
когда необходимо фиксировать адрес во
внешнем регистре, рекомендуется
использовать микросхемы: К580ИР82(83),
1533ИР23,33,34,...
(A8
A9). Это справедливо для К580. В тех случаях,
когда необходимо фиксировать адрес во
внешнем регистре, рекомендуется
использовать микросхемы: К580ИР82(83),
1533ИР23,33,34,...
ША, как правило, полностью не используется. Ее надо проектировать под конкретный объем памяти и внешних устройств.
Обобщенная схема регистра.
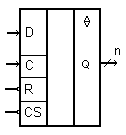
CS - сигнал выборки корпуса;
D - входные сигналы;
Q - выходные сигналы.
Шина управления.
В ШУ входят сигналы
записи, чтения, записи внешних устройств,
сигналы прерывания, ПДП и синхронизации.
При работе с памятью и внешними
устройствами возможны два способа
обращения к внешним устройствам: с
помощью команд IN и OUT(раздельное обращение
к памяти и внешним устройствам), с помощью
команд чтение и запись памяти. В первом
случае операционные возможности
обработки входных данных уменьшаются,
так как весь обмен информацией выполняется
через аккумулятор и несколько упрощается
дешифрация адреса, но требуется четыре
сигнала управления:
![]() ,
,![]() ,
,![]() ,
,![]() .
А во втором случае приемником или
передатчиком информации может быть
любой регистр МП и достаточно двух
сигналов
.
А во втором случае приемником или
передатчиком информации может быть
любой регистр МП и достаточно двух
сигналов![]() и
и![]() .
Формирование этих сигналов зависит от
особенностей МП. Для К580 сигналы
записи/чтения формируются в системном
контроллере К580ВК28, на вход которого
поступает информация с байта состояния
и сигналы чтение/запись МП. В МП 1821
требуется внешняя схема формирования
сигнала с помощью дешифратора (это
наиболее простой способ).
.
Формирование этих сигналов зависит от
особенностей МП. Для К580 сигналы
записи/чтения формируются в системном
контроллере К580ВК28, на вход которого
поступает информация с байта состояния
и сигналы чтение/запись МП. В МП 1821
требуется внешняя схема формирования
сигнала с помощью дешифратора (это
наиболее простой способ).
Если обращение идет как к ячейке памяти, то достаточно сделать следующее:
Приведенные схемы используются в тех случаях, когда нет режима ПДП. При наличии ПДП они должны быть с тремя состояниями или открытым коллектором. В качестве сигналов синхронизации обычно используются входы кварцевого генератора с частотой МП, усиленной по мощности, либо сигналы синхронизации, формируемые в МП.
Для К580 - сигнал F2T.
Для задания требуемой частоты МП, кварц на входы генератора ГФ24 должен иметь собственную частоту в 9 раз больше, чем требуемая (9:1).
Для 1821 соотношение 2:1. В качестве сигнала синхронизации используют выход SINC.
Особенности мп к1812вм85(intel 80185).
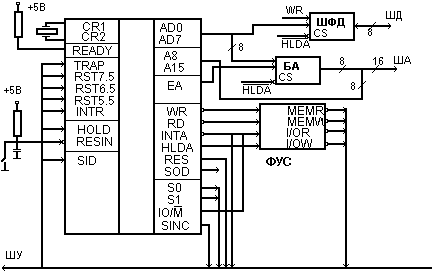
Рис.1.1. Структура процессорного блока на основе К1821 ВМ85:
TRAP - вход запроса не маскируемого прерывания;
RST7.5-RST5.5 - входы запроса прерывания повторного запуска;
INTR - вход запроса прерывания общего назначения;
RESIN - вход сигнала сброса;
SID - вход данных в последовательном коде;
SOD - выход данных в последовательном коде;
AD7-AD0 - мультиплексная шина адреса/данных;
А15-А8 - старшие разряды ША;
ЕА - стробирующий сигнал фиксации адреса;
S0, S1, IO/![]()
![]() -
сигналы состояния машинного цикла,(IO/
-
сигналы состояния машинного цикла,(IO/![]() )
является идентификатором обращения к
памяти (IO/
)
является идентификатором обращения к
памяти (IO/![]() = 0) или УВВ (IO/
= 0) или УВВ (IO/![]() = 1);
= 1);
SYNC - выход импульсов системной синхронизации, период сигнала SYNC и вдвое большее периода входных сигналов на входах CR1, CR2; CR1, CR2 - входы синхроимпульсов, могут присоединяться к кварцевому резонатору, LC или RC - цепочке, к внешнему генератору синхроимпульсов;
ШФД - шинный формирователь данных; БА - буферный регистр адреса;
ФУС - схема формирования управляющих сигналов.
Выполнен на
КМОП-технологии. Младший байт ША
передается в режиме с разделением
времени по ШД. Передача адреса
сопровождается сигналом ALE(EA). В МП
содержится встроенный генератор, поэтому
необходим только кварцевый резонатор,
подключенный ко входам CR1, CR2. Частота
кварца должна быть в 2 раза больше
необходимой частоты. Частота МП выводится
через выход SYNC. МП имеет встроенную
подсистему прерываний , которая
обрабатывает сигналы немаскируемого
прерывания NMI(TRAP), 3 векторных прерываний
RST 7.5, RST 6.5, RST 5.5 и вход INTR внешних прерываний
для обслуживания внешних контроллеров
прерываний. В составе МП есть входы и
выходы для реализации последовательных
каналов SID, SOD. Эти входы могут использоваться
для ввода/вывода битовых сигналов или
для реализации последовательного
обмена, который требует программных
затрат. Байт состояния, аналогично К580,
не формируется. Для контроля машинных
циклов используются выходы S0, S1, IO/![]() .
Формирование внешних сигналов для
работы с памятью и внешними устройствами
выполняются на основе сигналов
.
Формирование внешних сигналов для
работы с памятью и внешними устройствами
выполняются на основе сигналов![]() ,
,![]() ,
IO/
,
IO/![]() .
В отличии от К580, тактовая частота в 1,5
раза больше, а для питания используется
один источник в +5В. Циклы выполнения
команд аналогичны К580
.
В отличии от К580, тактовая частота в 1,5
раза больше, а для питания используется
один источник в +5В. Циклы выполнения
команд аналогичны К580![]() 1
такт.
1
такт.
Методология построения подсистемы прерывания аналогично ВМ80, однако число уровней прерывания увеличено с 1 до 5.
ТАБЛИЦА
|
ИМЯ ПРЕРЫВАНИЯ |
ПРИОРИТЕТ |
СТАРТОВЫЙ АДРЕС |
ВИД ЗАПРЕТА |
|
TRAP (NMI) |
1 |
24h |
|
|
RST 7.5 |
2 |
3Ch |
|
|
RST 6.5 |
3 |
34h |
уровень |
|
RST 5.5 |
4 |
2Ch |
уровень |
|
INTR |
5 |
ввод от внешнего устройства |
уровень |
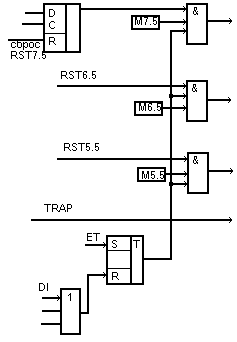
Особенностью немаскируемых прерываний является то, что запрос прерываний вызывается фронтом сигнала с последующим удержанием "1" на время более 400нсек. Это позволяет защитить вход запроса от действий возможных помех. Наиболее удобным является RST7.5. Для работы с этим уровнем в схеме предусмотрен триггер запроса ТЗ. Если прерывание не разрешено, то запрос RST7.5 будет запомнен, остальные запросы пропадают. Внутренний триггер запроса может быть сброшен командой SIM, по которой вектору прерываний P:=A.
Формат команды:
![]()
А(7) - данные последовательного вывода;
Х - разряд не используется;
IE - разрешение установки масок;
MRST7.5-MRST5.5 - маски прерываний.
Особенностью формата является возможность раздельного управления подсистемы обработки прерываний и последовательного вывода. Это управление выполняется разрядами 6 и 3.
Команда RIM - чтение регистра прерываний, выполняет обратные действия
(А):=(IP)
Формат команды:

Рис.1.3. Формат регистра масок прерываний при чтении командой RIM
Управляются уровнем сигнала.
Достоинства способа: большая помехоустойчивость.
Недостаток способа: необходимость управлять длительностью сигнала запроса.
Запрос должен быть снят в процедуре подпрограммы обработки.