

6. Реализация микропроцессора к580вм80 в системе
Универсальный программируемый контроллер "ЭЛЕКТРОНИКА 2702" построен на основе микропроцессора К580ВМ80, содержит в своем составе два контроллера ввода-вывода, два программируемых таймера, контроллер прямого доступа к памяти, контроллер прерываний, микросхемы постоянной и оперативной памяти, схемы логики управления. Управление контроллера осуществляется с клавиатуры, результаты отображаются на дисплее. Контроллер оперирует восьмибитным параллельным кодом, имеет сорок восемь двунаправленных программируемых каналов ввода-вывода. Контроллер может осуществлять следующие операции:
1. Опрос портов ввода-вывода и запись информации из них в ОЗУ.
2. Запись в порты ввода-вывода информации из ОЗУ.
3. Все операции с памятью характерные для процессора К580ВМ80 и определяемые набором его команд.
Подсистема памяти разрабатываемой МПС включает в себя модуль ОЗУ и модуль ПЗУ, доступ к которым осуществляется по системной магистрали.
Разработаны принципиальные схемы ОЗУ
и ПЗУ с учетом особенностей функционирования
заданных микросхем и схема селектора
адресов, вырабатывающая сигналы выборки
кристалла дл я
модулей памяти с учетом распределения
адресного пространства.
я
модулей памяти с учетом распределения
адресного пространства.
К средствам ввода/вывода можно отнести управляющие регистры и регистры состояния контроллеров прерываний, ПДП, последовательного обмена. Каждое из перечисленных выше устройств должно получить свой адрес в едином адресном пространстве или в пространстве ввода/вывода. В качестве средств ввода/вывода можно использовать многорежимные буферные регистры или специальные интерфейсные БИС, входящие в базовую серию или другие серии, совместимые с базовой (в нашем примере БИС КР580ВВ79).
Подсистема
прерываний должна обеспечивать реакцию
на системные запросы INT0 - INT3 и, кроме
того, если инициатором обмена может
выступать  ВУ,
то для этого организованы линии запросов
на прерывания от УВВ ОУ.
ВУ,
то для этого организованы линии запросов
на прерывания от УВВ ОУ.
При векторной подсистеме прерываний предусмотрен контроллер прерываний, который, анализируя все запросы, выбирает наиболее приоритетный и, получив подтверждение от ПМ, выставляет на линии данных вектор прерывания. В качестве контроллера прерываний использована БИС КР580ВН59.
В МПС предусмотрен канал ПДП, так как МПС реализована на однокристальном микропроцессоре. КПДП должен обеспечить передачу массива данных только в одном направлении - из памяти к ВУ. Для реализации канала можно воспользоваться серийным контроллером ПДП (например, КР580ВТ57), что в данном случае существенно избыточно, или разработать собственный упрощенный контроллер на один канал.
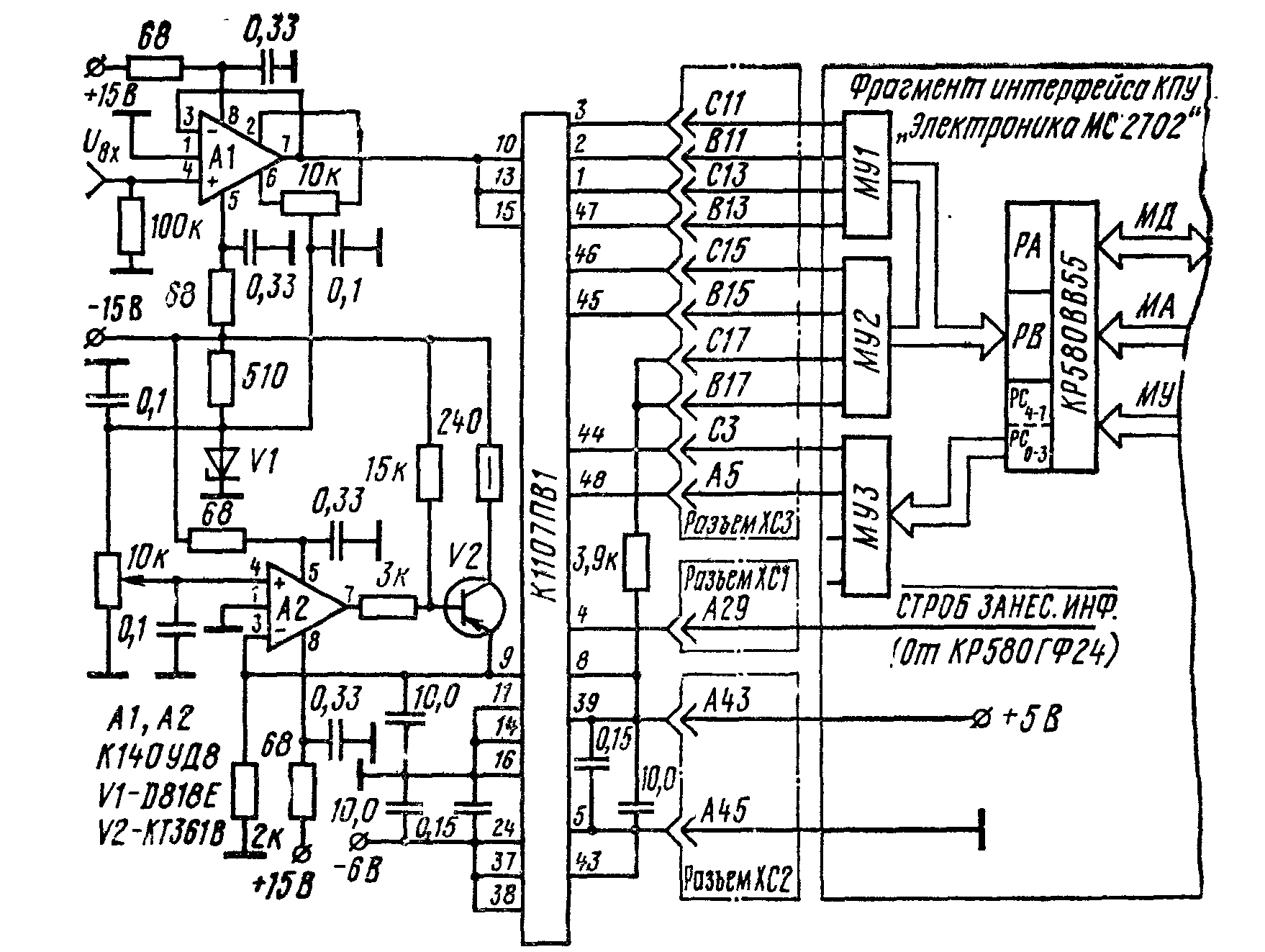
Рисунок 25 – Принципиальная схема микро-ЭВМ
 6
РАЗРАБОТКА БЛОК-СХЕМЫ УПРАВЛЯЮЩЕЙ
ПРОГРАММЫ
6
РАЗРАБОТКА БЛОК-СХЕМЫ УПРАВЛЯЮЩЕЙ
ПРОГРАММЫ
Обработка информации от цифровых датчиков и выдача управляющего воздействия у1 производится путем ввода значений х1, х2, х3, х4 и вычисления буферной функции f1(х1, х2, х3,х4), у1 = х1vх2vх3vх4.
При единичном значении f1 вырабатывается управляющий сигнал у1 = 1 длительностьюt1 = 90 мкс.
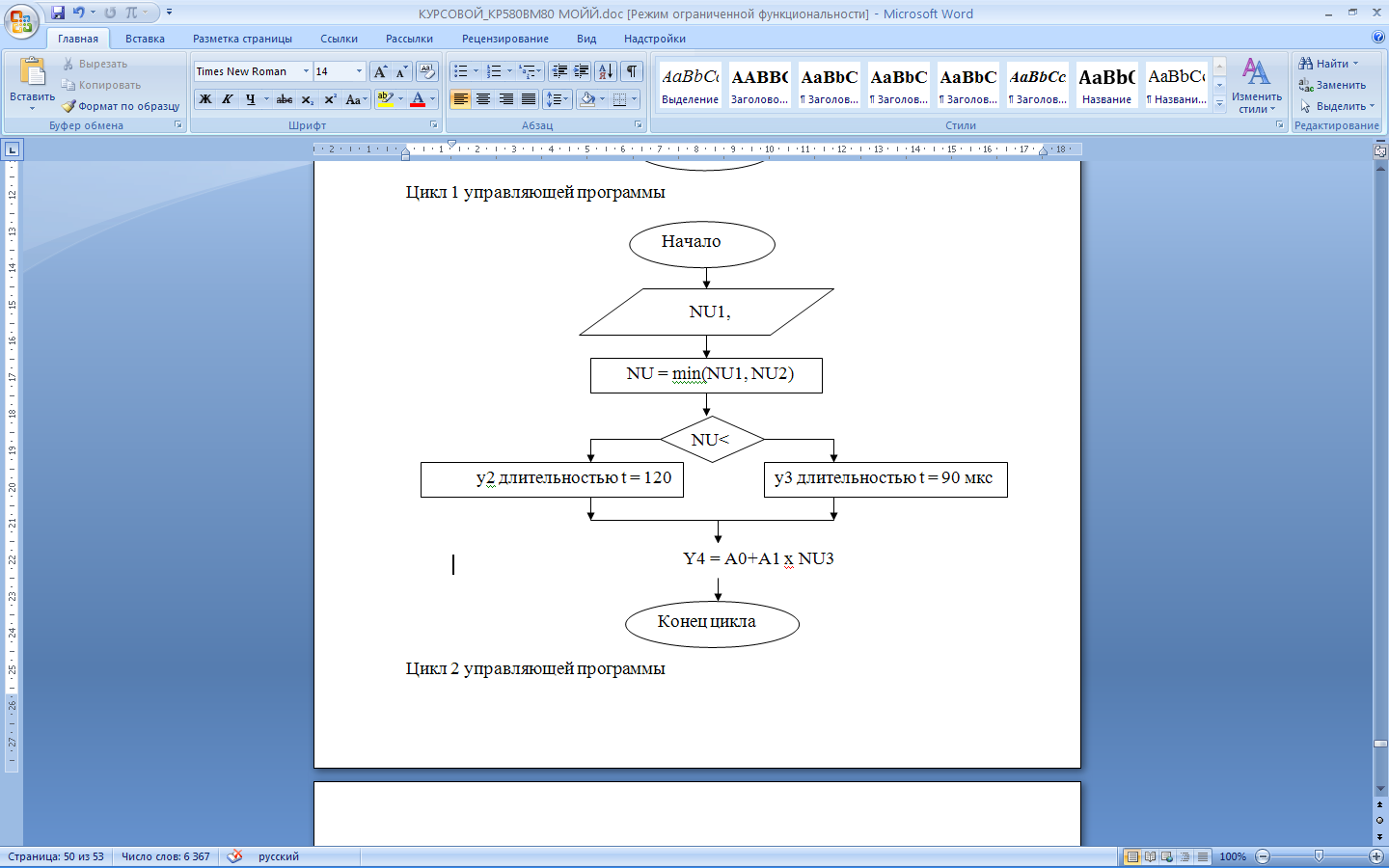
При обработке информации с аналоговых датчиков МП принимает коды NU1,NU2 с выходов АЦП и код константы К с регистра пульта управления. Далее вычисляется значение функцииNU=min(NU1,NU2) и сравнивается с константойQ, хранящейся в ПЗУ. В зависимости от результатов сравнения вырабатывается (аналогично у1) один из двух двоичных управляющих сигналов у2 или у3 заданной длительности по следующему правилу: еслиNU<Q, то выдать у2 длительностьюt2 = 120 мкс, иначе выдать у3 длительностьюt3 = 90 мкс.
Далее формируется управляющее воздействие Y4 для чего вводится значениеNU3 и производится вычисление по формуле:
Y4 =A0+A1 хNU3
Значение Y4 в виде 8-разрядного кода выдается на вход ЦАП.
Все двоичные переменные и константы, учитываемые в вычислениях: NU1,NU2,NU3, К,Q, А0, А1,Y4 рассматриваются как целые без знака.
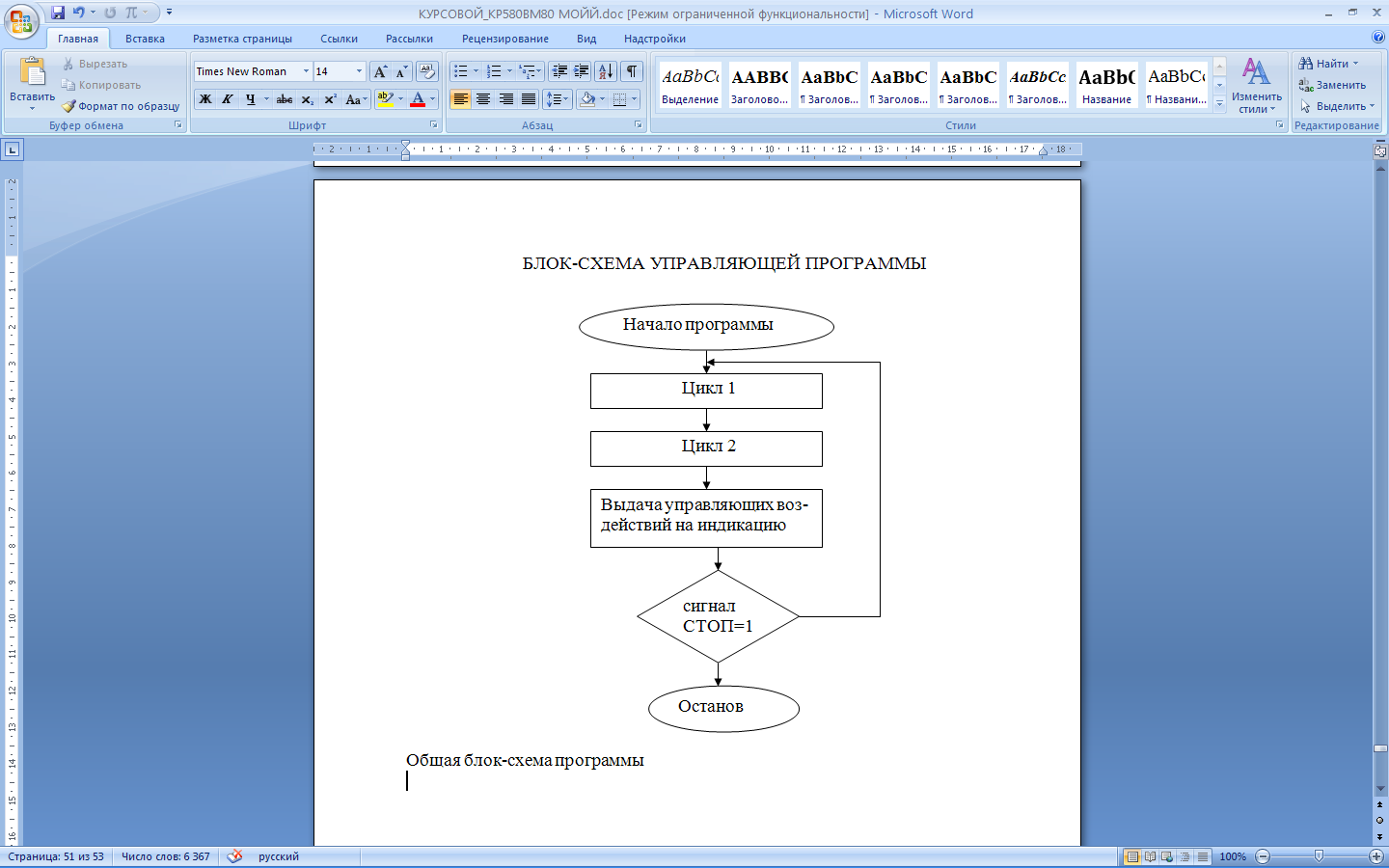
После выдачи всех управляющих воздействий проверяется состояние тумблера «СТОП» на пульте управления. Если «СТОП» = 0, цикл управления начинается сначала, иначе выполняется процедура останова системы, включающая следующие действия: формируется сигнал установки системы в исходное состояние путем подачи на линию начальной установки интерфейса двух прямоугольных импульсов, выполняется команда процессора «СТОП».
Блок-схема заданного цикла управления разбита на две части (рисунок 32 и 33), общая блок-схема представлена на рисунке 34.


нет у1 = Х1
у1 = х1
да у1 = Х1
у1 длительностью t=90 мкс








да
Рисунок 26 – Цикл 1 управляющей программы

NU = min(NU1,NU2)


да у1 = Х1
нет у1 = Х1

у3длительностьюt=90мкс
Y4 = A0+A1х NU3










у2длительностьюt=120мкс
Рисунок 27 - Цикл 2 управляющей программы


Цикл 1

Цикл 2
Выдача управляющих воздействий на
индикацию
нет у1 = Х1
да






Рисунок 28 – Общая блок-схема программы
Таблица истинности:
-
Х1
Х2
Х3
Х4
Y
0
0
0
1
1
0
0
1
0
1
0
1
0
0
1
1
0
0
0
1
1
1
0
0
0
1
1
1
0
1
1
1
1
1
0
0
1
1
1
1
0
0
1
1
0
0
0
0
1
1
1
0
1
0
0
0
1
0
1
0
0
0
0
0
0
1
0
0
1
0
0
1
1
0
0
0
1
0
1
0
 ЗАКЛЮЧЕНИЕ
ЗАКЛЮЧЕНИЕ
В результате курсового проектирования в соответствии с заданным вариантом разработана микропроцессорная система на базе микроконтроллера КР580ВМ80. На основании анализа функционирования данного микроконтроллера разработан процессорный модуль и интерфейс МПС.
В соответствии с техническим заданием разработана система памяти на базе БИС ОЗУ К565РУ6 и БИС ПЗУ К541РЕ1.
Для обеспечения полноценного и бесперебойного функционирования микропроцессорной системы разработана подсистема ввода-вывода и прерываний.
На основании анализа структурных схем устройств, входящих в разрабатываемую микропроцессорную систему, а также на основании выбранного способа подключения данных устройств к магистралям составлена структурная схема микропроцессорной системы.
Создана блок-схема цикла управления, по которой можно написать программу на языке Assemblerдля данного типа микропроцессора.
 СПИСОК
ИСПОЛЬЗУЕМЫХ ИСТОЧНИКОВ
СПИСОК
ИСПОЛЬЗУЕМЫХ ИСТОЧНИКОВ
1 Пеструхин Л.Н. Архитектура и проектирование микроЭВМ. Организация вычислительных процессов. – М.: Высшая школа, 1988.
2 Гуртовцев А.Л., Гудыменко С.В., Программы для микропроцессоров : справ. пособие. - Минск. Высшая школа, 1989.
3 Корнеев В., Киселев А. Современные микропроцессоры, 3-е издание. - Санкт-Петербург, 2003.
4 Новиков Ю.В., Скоробогатов П.К. Основы микропроцессорной техники. - М.: ИНТУИТ.РУ, 2003.
5 Федорков Б.Г., Телец В.А. Микросхемы ЦАП и АЦП: функционирование, параметры, применение – М.:Энергоатомиздат, 1990.
6 Хвощ С.Т., Варленческий Н.Н., Попов В.А. Микропроцессоры и микроЭВМ в системах автоматического управления: справочник – Л.: Машиностроение, 1987.
7 Новаченко И.В., Петухов В.М., Блудов И.П., Юровский А.В. Справочник полупроводниковые приборы. – Кубк-а, 1996.
8 http://jeans.invaders.com.ua/users/69557/blogs/150602
9 http://tochnie.uchilka.ru/view/2968-350.htm
10 http://pokrovsk.info/referat/ref36268.html
11 http://beda.stup.ac.ru/psf/ziss/wmaster/books/frolov/bsp/V02/ch8.htm
12 http://kazus.ru/lenta/view/0_6595_0.htmlъ
13 http://jtdigest.narod.ru/kollection/ut88/mikrosx.htm#KR580VK38
14 http://olddos.narod.ru/doc/comp/bsp/v33/ch5.htm
ПРИЛОЖЕНИЕ А:
(обязательное)
Графическая часть
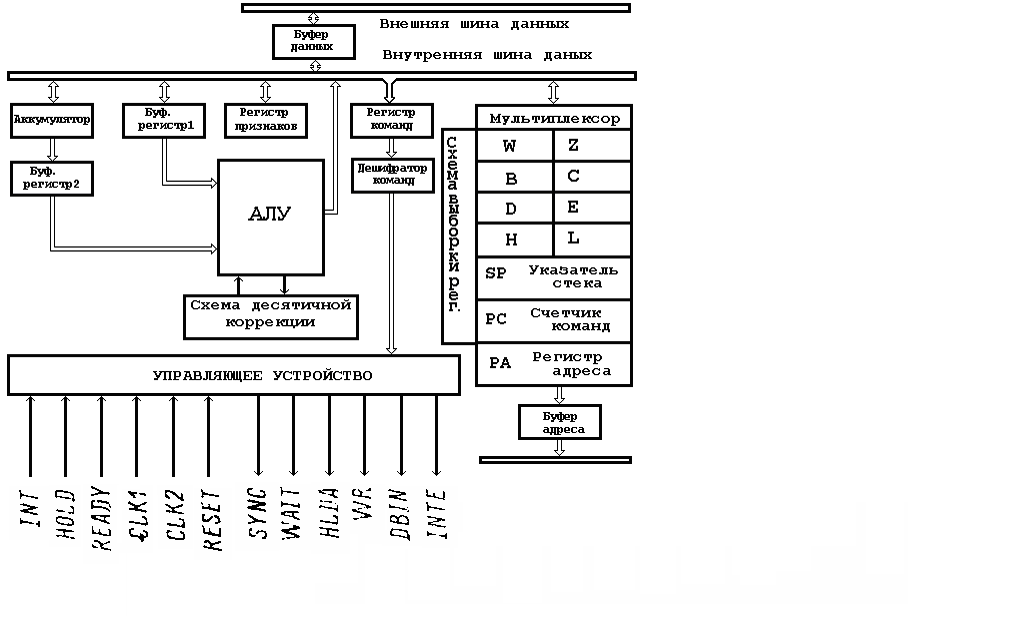
1 Структурная схема микропроцессора К580ВМ80
2 Блок-схема управляющей программы
3 Принципиальная схема универсального программируемого контроллера "ЭЛЕКТРОНИКА 2702"
4 Функциональная схема микропроцессорной
системы 
Структурная схема микропроцессора К580ВМ80
Принципиальная схема универсального программируемого контроллера "ЭЛЕКТРОНИКА 2702"



нет у1 = Х1
у1 = х1
да у1 = Х1
у1 длительностью t=90 мкс








i
да
Цикл 1 управляющей программы

NU = min(NU1,NU2)


да у1 = Х1
нет у1 = Х1

у3длительностьюt=90мкс
Y4 = A0+A1х NU3










у2длительностьюt=120мкс
Цикл 2 управляющей программы
БЛОК-СХЕМА управляющей программы


i