

3.8 Разработка принципиальной схемы микро-эвм
Подсистема памяти разрабатываемой МПС включает в себя модуль ОЗУ и модуль ПЗУ, доступ к которым осуществляется по системной магистрали.
Разработаны принципиальные схемы ОЗУ и ПЗУ с учетом особенностей функционирования заданных микросхем и схема селектора адресов, вырабатывающая сигналы выборки кристалла для модулей памяти с учетом распределения адресного пространства.
К средствам ввода/вывода можно отнести
управляющие регистры и регистры
состояния контроллеров прерываний,
ПДП, последовательного обмена. Каждое
из перечисленных выше устройств должно
получить свой адрес в едином адресном
пространстве или в пространстве
ввода/вывода. В качестве средств
ввода/вывода можно использовать
многорежимные буферные реги стры
или специальные интерфейсные БИС,
входящие в базовую серию или другие
серии, совместимые с базовой. Подсистема
прерываний должна обеспечивать реакцию
на системные запросы INT0 - INT3 и, кроме
того, если инициатором обмена может
выступать ВУ, то для этого организованы
линии запросов на прерывания от УВВ
ОУ.
стры
или специальные интерфейсные БИС,
входящие в базовую серию или другие
серии, совместимые с базовой. Подсистема
прерываний должна обеспечивать реакцию
на системные запросы INT0 - INT3 и, кроме
того, если инициатором обмена может
выступать ВУ, то для этого организованы
линии запросов на прерывания от УВВ
ОУ.
 При
векторной подсистеме прерываний
предусмотрен контроллер прерываний,
который, анализируя все запросы, выбирает
наиболее приоритетный и, получив
подтверждение от ПМ, выставляет на
линии данных вектор прерывания. В
качестве контроллера прерываний
использована БИС КР580ИК59.
Система ПДП реализована на базе
контроллера ПДП КР580ВТ57 и буферного
регистра К580ИР12. В МПС предусмотрен
канал ПДП, так как МПС реализована на
однокристальном микропроцессоре. КПДП
должен обеспечить передачу массива
данных только в одном направлении - из
памяти к ВУ. Для реализации канала
можно воспользоваться серийным
контроллером ПДП, что в данном случае
существенно избыточно, или разработать
собственный упрощенный контроллер на
один канал.
При
векторной подсистеме прерываний
предусмотрен контроллер прерываний,
который, анализируя все запросы, выбирает
наиболее приоритетный и, получив
подтверждение от ПМ, выставляет на
линии данных вектор прерывания. В
качестве контроллера прерываний
использована БИС КР580ИК59.
Система ПДП реализована на базе
контроллера ПДП КР580ВТ57 и буферного
регистра К580ИР12. В МПС предусмотрен
канал ПДП, так как МПС реализована на
однокристальном микропроцессоре. КПДП
должен обеспечить передачу массива
данных только в одном направлении - из
памяти к ВУ. Для реализации канала
можно воспользоваться серийным
контроллером ПДП, что в данном случае
существенно избыточно, или разработать
собственный упрощенный контроллер на
один канал.
О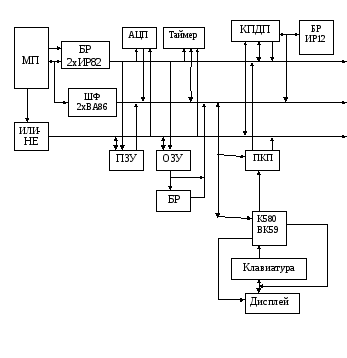 бщая
схема управляющей МПС представлена на
рисунке 30.
бщая
схема управляющей МПС представлена на
рисунке 30.
 Рисунок
30 – Общая схема управляющей МПС
Рисунок
30 – Общая схема управляющей МПС
 4
РАЗРАБОТКА ЭЛЕКТРИЧЕСКОЙ ПРИНЦИПИАЛЬНОЙ
СХЕМЫ
4
РАЗРАБОТКА ЭЛЕКТРИЧЕСКОЙ ПРИНЦИПИАЛЬНОЙ
СХЕМЫ
ИНДИКАТОРА ШИН
Как с технической, так и с экономической стороны индикатор шин удовлетворяет большинству критериев идеального индикатора шин: он простой, высоко-интегрированный, с малыми габаритами. Многие параметры ИШ программно -управляемые, что позволяет заложить в устройство новые возможности. Все это делает индикаторы очень перспективными приборами.
Индикатор шин применяют при настройке и ремонте аппаратных устройств на базе МП К1810ВМ86. Индикатор состоит из микропульта, платы процессора и сорокаштырьковой вилки.
При начальной настройке устройства, когда нет готовых программ в ПЗУ, с помощью подстановки данных можно запрограммировать предусмотренные на плате ВУ и проверить ОЗУ.
Режим подстановки данных позволяет использовать индикатор шин как оценочное устройство при работе с МП К1810ВМ86.
Технические характеристики индикатора шин определяются характеристиками применяемого микропроцессора. Таким образом, индикатор обладает следующими параметрами:
- допустимый диапазон температур -10° С до + 70° С;
- напряжение (питание индикатора шин осуществляется через соответствующие контакты вилки) + 5 В;
- максимальная тактовая частота 5МГц ;
- максимальная потребляемая мощность 15Вт.
Индикатор шин предназначен для аппаратной настройки устройств на основе МП К1810ВМ86.
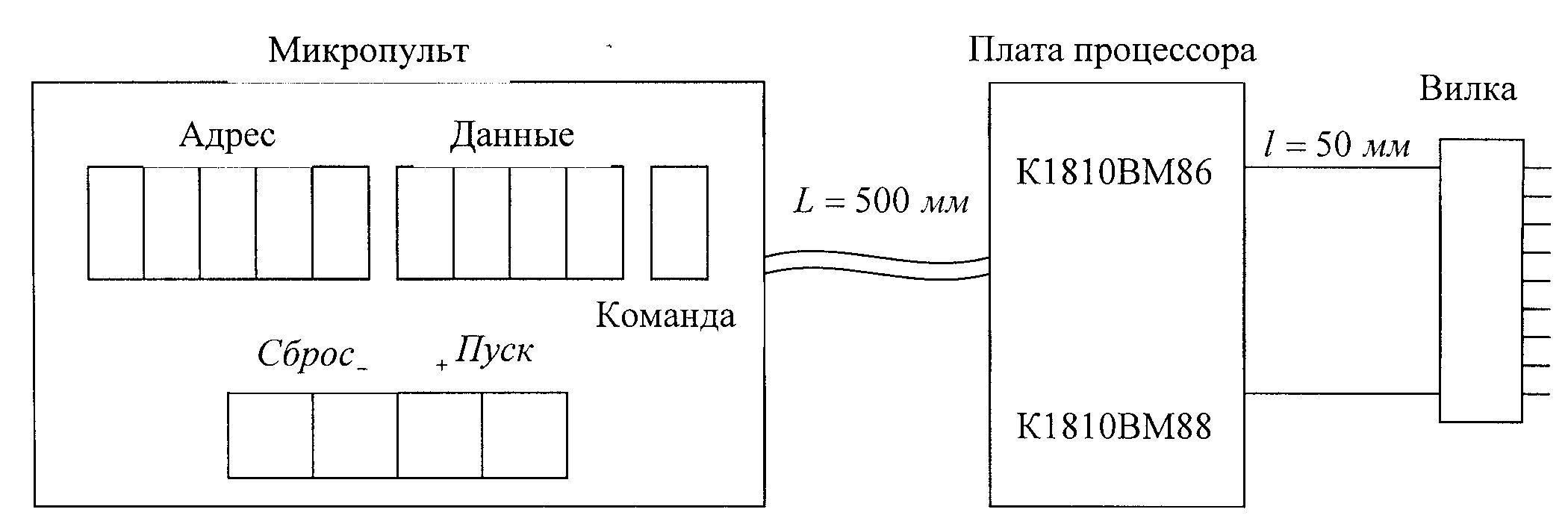
Рисунок 31 - Общая структура индикатора шин
Вилка устанавливается в розетку МП настраиваемого устройства. Питание индикатора осуществляется через соответствующие контакты вилки. Плата процессора содержит эмулирующий МП К1810ВМ86, который всеми выводами, за исключением RDY, подключен через плоский кабель длиной 50 мм к вилке индикатора шин. Сигнал RDY, поступающий с платы пользователя, «перехватывается» индикатором для обеспечения пошагового режима работы.
Микропульт соединен с платой процессора пятипроводным кабелем длиной 500 мм. С него в плату процессора поступают в последовательном коде соответствующие команды, а с платы также в последовательном коде выдается в микропульт информация о состоянии шины адреса, данных и управляющих сигналов эмулирующего МП.
Микропульт имеет 10-разрядный цифровой дисплей для отображения адреса, данных и управляющих сигналов МП и четыре клавиши управления работой индикатора шин.
Клавиша «Сброс» предназначена для физического сброса микропульта и платы процессора.
Клавиши «-» и «+» необходимы для перемещения запятой по разрядам цифрового дисплея влево и вправо соответственно, а также для увеличения и уменьшения шестнадцатеричной цифры соответствующего индикатора. Кратковременное нажатие на клавишу «-» или «+» (менее 1/3 с) изменяет значение шестнадцатеричной цифры, а более длительное - перемещает запятую.
Клавиша «Пуск» служит для запуска индикатора шин в работу в выбранном режиме. По сбросу индикатор переходит в исходное состояние и на его правом крайнем индикаторе появляется символ выбранного режима. По нажатию клавиши «-» или «+» последовательно перебираются все возможные режимы работы индикатора шин. После выбора соответствующего режима можно нажать клавишу «Пуск» и перевести индикатор на работу в этом режиме.
Среди возможных режимов работы индикатора шин: Т - пошаговый, G - автоматический, q - полуавтоматический с остановом на контрольной точке, Р - установки контрольной точки, А - перехода по заданному адресу, Н - полуавтоматический с остановом на контрольной точке и подстановкой данных, U - пошаговый с подстановкой данных.
Опрос клавиатуры, управление индикацией и связь с платой процессора по двухпроводной линии осуществляет однокристальная ЭВМ (ОЭВМ) К1810ВМ86 под управлением монитора микропульта «зашитого» в РПЗУ К573РФ2.
Выдачу всех необходимых управляющих сигналов на плату процессора и связь с микропультом по двухпроводной линии обеспечивает ОЭВМ под управлением монитора процессорной платы.
Регистры D12 и D14
предназначены для сохранения адреса
по сигналу ALE МП и данных
по сигналу ALE35 ОЭВМ, регистр
D17 - для сбора информации
с управляющих выводов МП, регистры D19
и D20 - для управляющих
сигналов в максимальном режиме. На
триггере D16 собрана  схема
управления готовностью в пошаговом
режиме.
схема
управления готовностью в пошаговом
режиме.
 При
установке эмулирующего МП К1810ВМ86
выключатель SA2 необходимо
перевести в соответствующее положение.
Индикатор шин удобно применять при
настройке и ремонте устройств на базе
МП К1810ВМ86, прогоняя «зашитую» в РПЗУ
программу в автоматическом, пошаговом
или полуавтоматическом режиме с
остановом на контрольной точке.
При
установке эмулирующего МП К1810ВМ86
выключатель SA2 необходимо
перевести в соответствующее положение.
Индикатор шин удобно применять при
настройке и ремонте устройств на базе
МП К1810ВМ86, прогоняя «зашитую» в РПЗУ
программу в автоматическом, пошаговом
или полуавтоматическом режиме с
остановом на контрольной точке.
Если неисправность заключается в «залипании» отдельных сигналов адреса, данных или управляющих сигналов, то ее удается локализировать за первые же несколько шагов в пошаговом режиме.

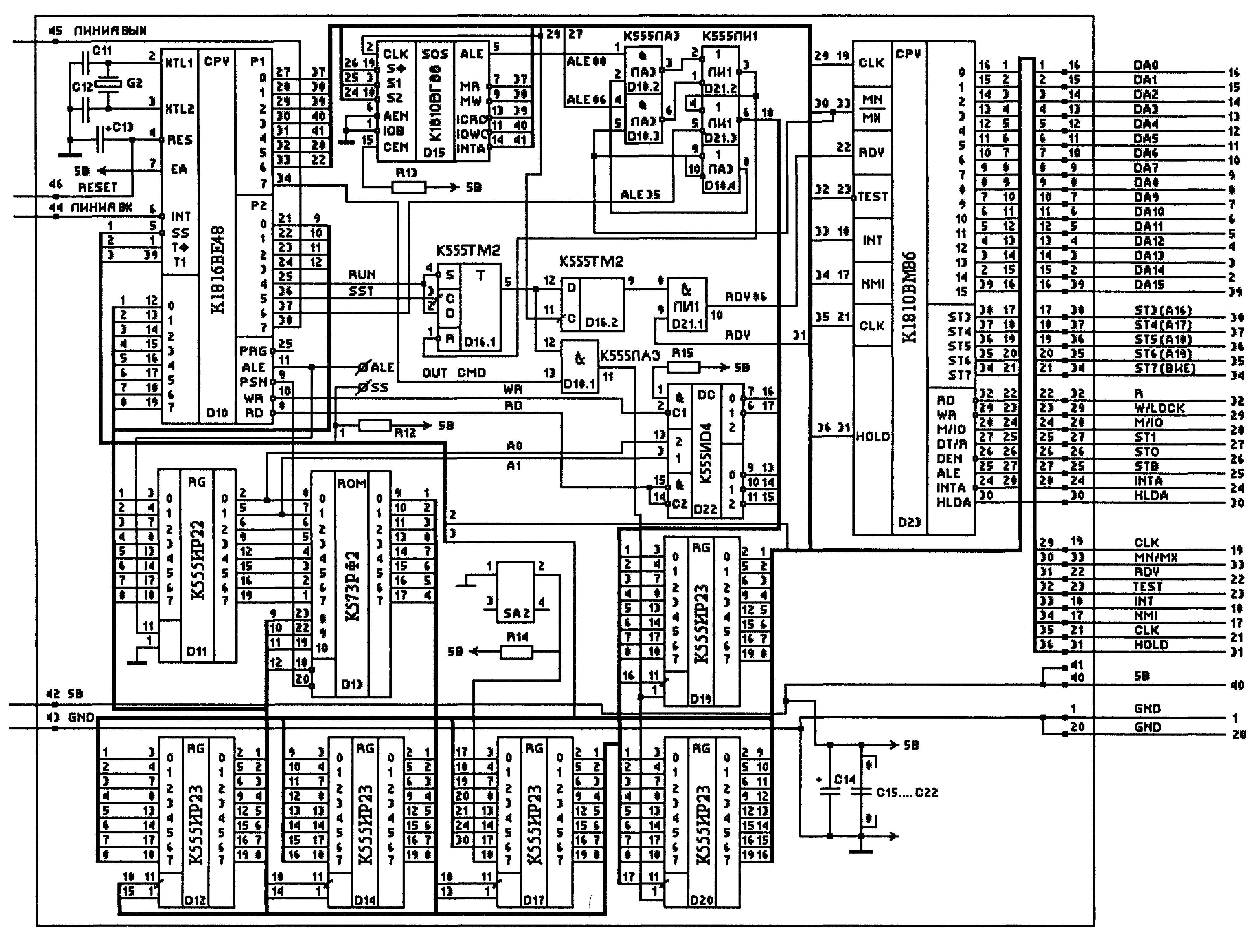
Рисунок 35 - Принципиальная схема процессора индикатора шин
ОПИСАНИЕ БЛОК-СХЕМЫ РАБОТЫ ИНДИКАТОРА ШИН
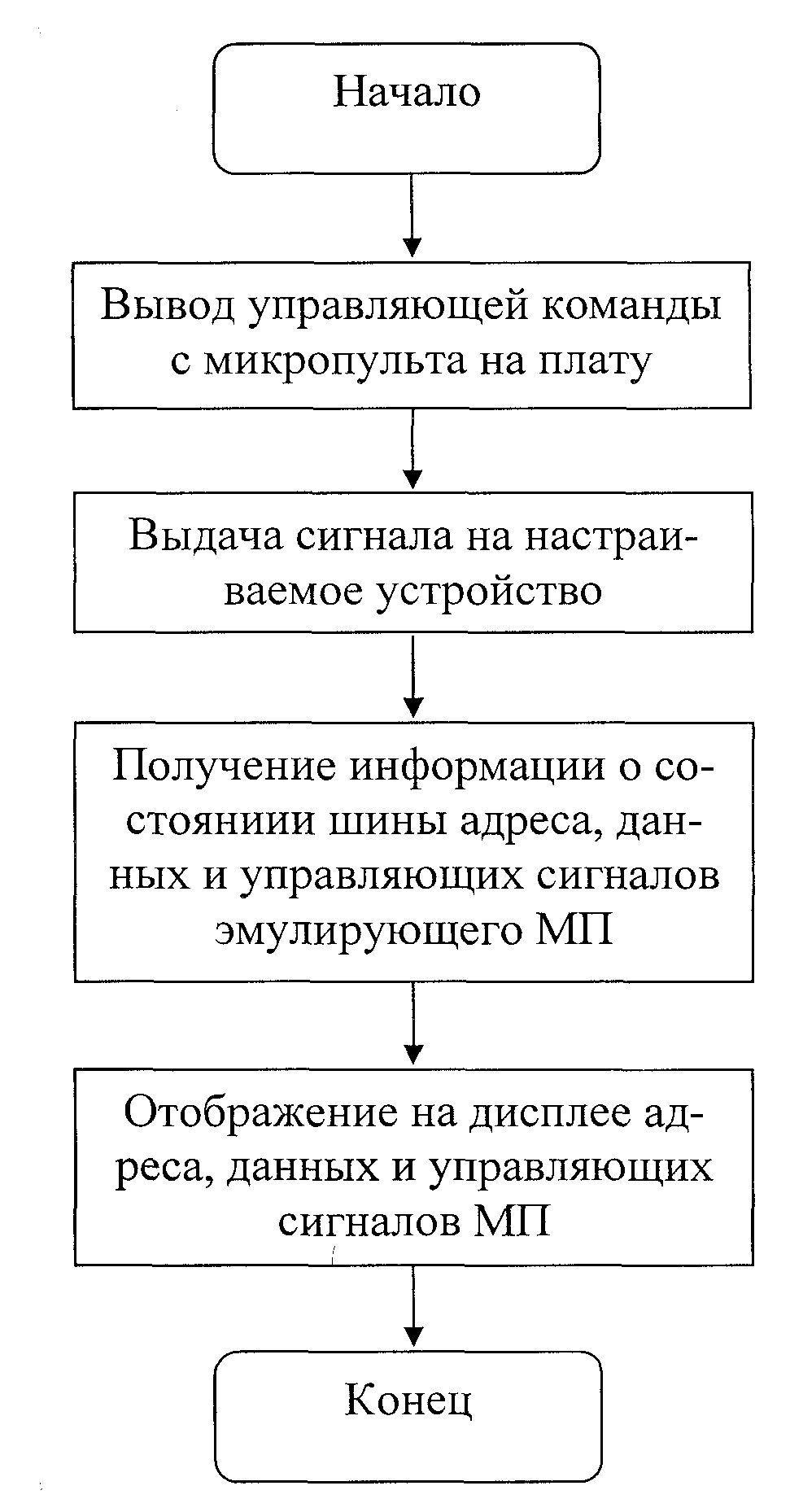
Описывая алгоритм работы индикатора шин видно, что его удобно применять при настройке и ремонте устройств на базе МП К1810ВМ86, прогоняя «зашитую» в РПЗУ программу в автоматическом, пошаговом или полуавтоматическом режиме с остановом на контрольной точке. Управляющая команда поступает из микропульта на плату, затем подается на настраиваемое устройство. Затем идет обратная передача информации от настраиваемого устройства и отображается на дисплее микропульта.
 ЗАКЛЮЧЕНИЕ
ЗАКЛЮЧЕНИЕ
В ходе курсового проектирования была создана управляющая МПС на базе однокристального микропроцессора К1810ВМ86, удовлетворяющая всем параметрам, заданным в техническом задании.
Разработана подсистема прерываний на базе контроллера К1810ВН59, подсистема ПДП на базе контроллера КР580ВТ57, подсистема ввода-вывода и светодиодной индикации для ввода значений цифровых датчиков и двоичных кодов и вывода значений функций управляющих воздействий.
 СПИСОК
ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ
СПИСОК
ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ
1 Горбунов В.Л., Панфилов Д.И., Преснухин Д.Л. Микропроцессоры. Основы построения микроЭВМ. – М.: Высшая школа, 1986.
2 Гуртовцев А.Л., Гудыменко С.В. Программы для микропроцессоров: справ. пособие. – Минск: Высшая школа, 1989.
3 Корнеев В., Киселев А. Современные микропроцессоры. 3-е издание. – Санкт-Петербург, 2003.
4 Новиков Ю.В., Скоробогатов П.К. Основы микропроцессорной техники. – М.: ИНТУИТ.РУ, 2003.
5 Хвощ С.Т., Варлинский Н.Н., Попов Е.А. Микропроцессоры и микроЭВМ в системах автоматического управления: справочник. – Л.: Машиностроение, 1987.
 ПРИЛОЖЕНИЕ
А
ПРИЛОЖЕНИЕ
А
(обязательное)
Графическая часть
1. Структурная схема микропроцессора К1810ВМ86
2. Программируемое ПЗУ К541РТ2
3. ОЗУ К565РУ6
4. Программируемый таймер