

1.23. Широтно-импульсная модуляция в однофазном инверторе тока:
а – диаграммы управляющих импульсов и выходного тока инвертора без ШИМ; б – диаграммы управляющих импульсов и выходного тока инвертора при ШИМ.
Очевидно, что при таком способе управления инвертором среднее значение противо-ЭДС инвертора уменьшается и на интервалах одновременного проводящего состояния тиристоров одного плеча противо-ЭДС инвертора становится равной нулю (короткое замыкание на стороне постоянного тока инверторного моста). Это обусловливает повышение выходного напряжения инвертора, так как средние значения напряжений до сглаживающего реактора Ld и после него в установившемся режиме должны быть равны между собой. Выходное напряжение однофазного мостового инвертора тока имеет следующую зависимость от угла:
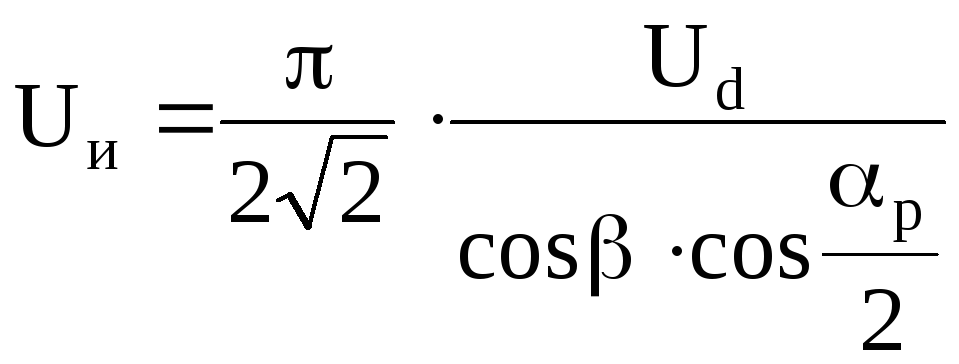
![]() .
.
Из (1.25) видно, что изменением угла αр можно регулировать выходное напряжение инвертора тока. Регулирование выходного напряжения посредством ШИМ не требует введения в силовую схему дополнительных регулирующих устройств, что является одним из существенных преимуществ данного способа. Однако оно связано с ухудшением гармонического состава выходного напряжения инвертора, что приводит к утяжелению выходных фильтров и к менее эффективному использованию других элементов силовой схемы, в частности, тиристоров, диодов и т.д.
2. Структурная схема системы. Определение объекта управления, выходной координаты, управляющих и возмущающих воздействий. Основные звенья системы.
В данной работе рассматривается следящий электропривод угла поворота исполнительного механизма с транзисторным силовым широтно-импульсным преобразователем (ШИП). По виду электрической схемы системы автоматического управления (см. задание) составим структурную схему системы:
Р исунок
2.1. Структурная
схема системы.
исунок
2.1. Структурная
схема системы.
В качестве выходной координаты в данном объекте управления принимаем угол поворота исполнительного механизма, «Θ»; управляющего воздействия – напряжение якоря, «Uя»; возмущающего воздействия – момент статической нагрузки, «Мс». Основными звеньями системы являются: сельсинная пара совместно с фазочувствительным усилителем (ФЧУ), «ФЧУ»; усилитель, «У»; широтно-импульсный преобразователь, «ШИП»; объект управления (двигатель постоянного тока независимого возбуждения), «М» и редуктор, «РЕД».
 Рисунок 2.2 – Функциональная схема.
Рисунок 2.2 – Функциональная схема.
3. Уравнения движения и передаточные функции объекта управления по отношению к управляющему и возмущающему воздействию.
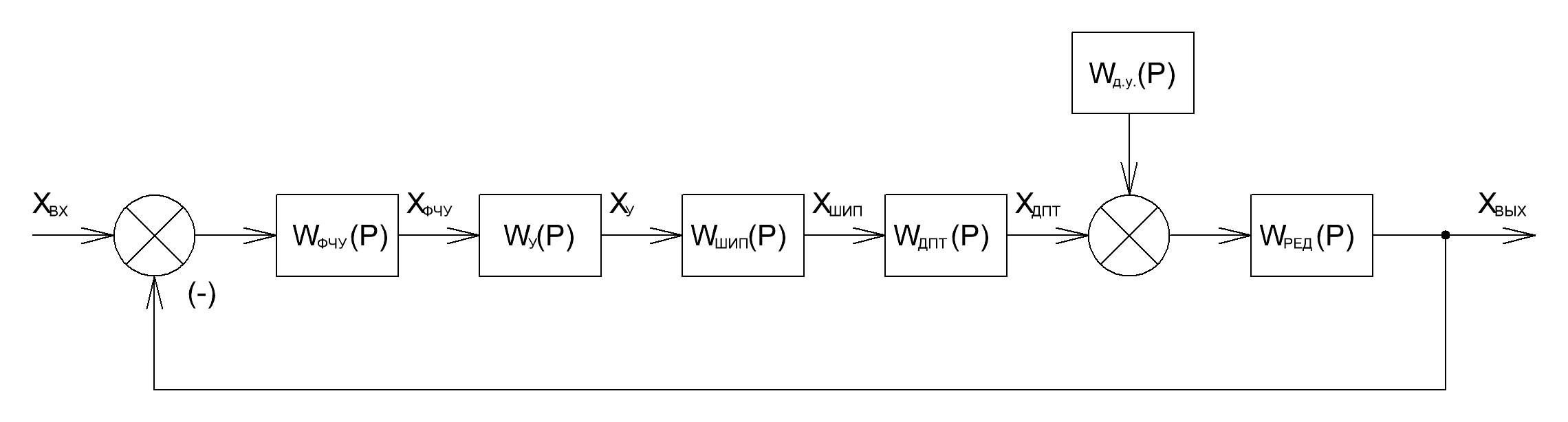
Рисунок 3.1. Структурная схема системы по управлению.
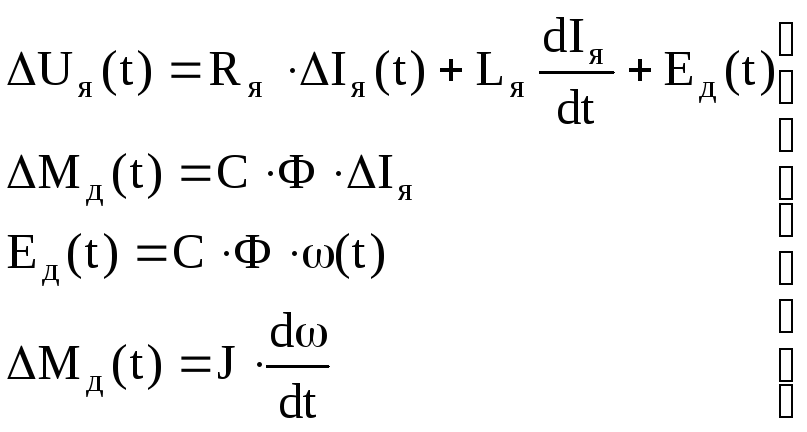
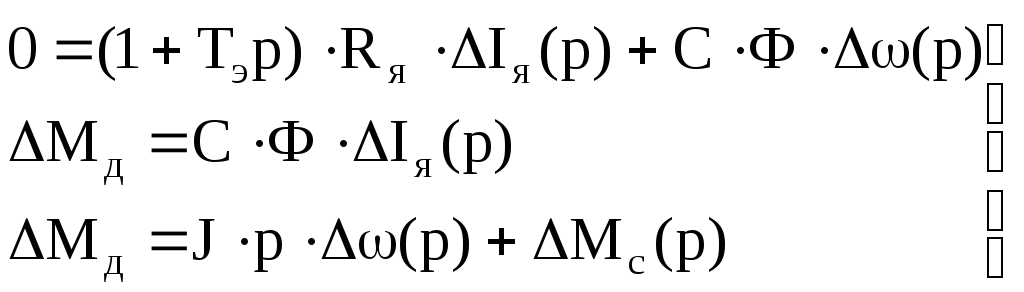
Как было сказано выше, управляющим воздействием на объект управления является напряжение якоря «Uя». В этом случаи считаем Uя(t)=var, Ф(t)=const, Мс(t)=0.
Для данного режима движение машины можно описать следующей системой уравнений:
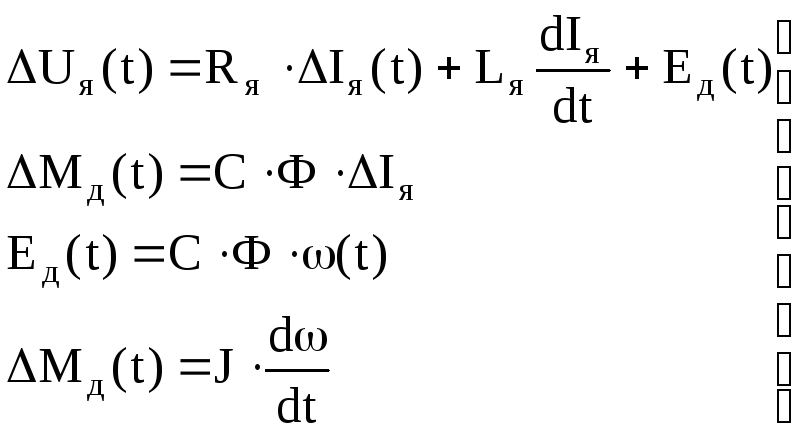
![]()
В этой системе: Мд – момент, развиваемый двигателем; J – момент инерции двигателя и исполнительного механизма, приводимого к валу машины.
Считая начальные условия нулевыми, запишем систему уравнений (3.1) в операторном виде:

![]()
Из второго уравнения системы (3.2) найдём изображение тока:
![]()
![]() .
.
Преобразуем первое уравнение системы (3.2):
![]()
![]() .
.
Введём некоторые обозначения:
![]()
![]() – электромагнитная
постоянная времени;
– электромагнитная
постоянная времени;
![]()
![]() – электромеханическая
постоянная времени;
– электромеханическая
постоянная времени;
![]()
![]() – статический
коэффициент передачи.
– статический
коэффициент передачи.
Подставим в (3.4) выражение тока из (3.3), учтём обозначение (3.5) и вынесем за знак скобки постоянный коэффициент С·Ф, получим:

![]() .
.
С учётом (3.6):
![]()
![]()
Определим передаточную функцию двигателя по отношению управляющему воздействию:
![]()
![]() .
.
Подставляя свои данные, получим:
![]()
![]() .
.
Определим каким звеном описывается данная передаточная функция:
![]()
![]()
![]()
Следовательно, двигатель постоянного тока в нашем случае является колебательным звеном. А значит, передаточная функция имеет вид:
![]()
![]() .
.
Н![]() айдём
постоянную времени Т и коэффициент
демпфирования (коэффициент относительного
затухания) ξ. Для этого приравняем
знаменатели передаточных функций (3.10)
и (3.13):
айдём
постоянную времени Т и коэффициент
демпфирования (коэффициент относительного
затухания) ξ. Для этого приравняем
знаменатели передаточных функций (3.10)
и (3.13):
![]() .
.
Следовательно:
![]()
![]()
![]() .
.
Найдём коэффициент демпфирования:
![]()
![]()
![]()
Это ещё раз подтверждает, что двигатель постоянного тока в нашем случае является колебательным звеном.
Подставим в передаточную функцию (3.13) полученные данные:
![]() .
.

Рисунок 5.1. Структурная схема системы по возмущению.
Возмущающим воздействием на объект управления, является момент статической нагрузки Мс. В этом случаи Мс(t)=var, Ф(t)=const, Uя(t)=0.
Для данного режима движение машины можно описать следующей системой уравнений:
 .
.![]()
С учетом принятых допущений, запишем систему в операторном виде:
![]() .
.
Приравняем правые части второго и третьего уравнений системы (3.18):
![]()
![]() .
.
Отсюда:
![]()
![]() .
.
Подставив (3.20) в первое уравнение системы (3.18), получим:
![]()
![]()
![]() .
.
Разделив переменные, получим:
![]()
![]()
![]() .
.
Выполним очевидные преобразования левой и правой частей (3.22). Получим:
![]()
![]()
![]()
Введем обозначение:
![]()
![]() – коэффициент
передачи двигателя по отношению к
возмущающему воздействию.
– коэффициент
передачи двигателя по отношению к
возмущающему воздействию.
Запишем передаточную функцию по отношению к возмущающему воздействию:

![]() .
.
Применительно к исходным данным системы, передаточная функция будет иметь вид:

![]() .
.