

1.4. Устройство и принцип действия редуктора.
Редуктором называется механизм, состоящий из зубчатых или червячных передач, выполненного в виде отдельного агрегата и служащий для передачи мощности от двигателя рабочей машине с понижением угловой скорости и повышением вращающегося момента ведомого вала по сравнению с валом ведущим.
Выбор схем передач, используемых в редукторе, зависит от требуемых габаритных размеров, массы, КПД, кинематической точности, крутильной жесткости, инерционности.
Для передачи движения между валами с большим межосевым расстоянием при передаточном отношении | i | до 5 используют плоскоременные передачи. Клиноременные передачи позволяют иметь в 2 – 3 раза меньшие габаритные размеры и применяются при | i | до 6 ... 8. Если требуются высокая кинематическая точность и жесткость, то в быстроходных передачах используют передачи с зубчатым ремнем.
Цепная передача позволяет иметь еще меньшие размеры, работает без относительного скольжения звеньев, может применяться при | i | до 10. В сравнении с ременной она имеет больший шум и циклически изменяемое передаточное отношение. КПД при максимальной нагрузке ременных и цепных передач около 0,96 и 0,95 соответственно.
3убчатые одноступенчатые цилиндрические передачи имеют в 2 – 3 раза меньшие размеры, чем цепная передача, и КПД 0,97 ... 0,98.
Планетарная передача имеет в 1,5 – 2 раза меньшие размеры и массу, чем одноступенчатая цилиндрическая, и КПД 0,98 ... 0,985.
Коническую передачу применяют только в случаях необходимости передать вращение между пересекающимися осями. Ее КПД около 0,97.
При передаточных отношениях свыше 6,3 ... 12,5 целесообразно использовать многоступенчатые передачи. Преимущества по габаритным размерам и КПД здесь также имеют планетарные зубчатые передачи.
В промышленности наиболее распространены редукторы с передаточным отношением от 10 до 100 (около 85%), причем наиболее часто используются | i | = 25 ... 40. Передаточное отношение до 10 используется примерно в 5% случаев.
Наибольшая потребность в редукторе имеет место для момента на выходном звене 250 Н·м – около 30%, 500 Н·м – около 20%, 1000 Н·м – около 15%, 2000 Н·м около 15%, 12,5 Н·м – около 14%.
На рисунке 1.16 показан редуктор, составленный из двух последовательно соединенных зубчатых пар 7-1 и 2-4. Входное звено 7 соосно с выходным звеном 3. Промежуточное звено представляет собой вал-шестерню 2 и связанное, с ней коническим соединением зубчатое колесо 1. Колесо 4 имеет неподвижное соединение с валом 3. Все три звена установлены в подшипниках качения, размещенных в корпусных деталях 5, 6, 8, плотно и неподвижно соединенных между собой. Один из подшипников входного звена установлен внутри выходного звена.
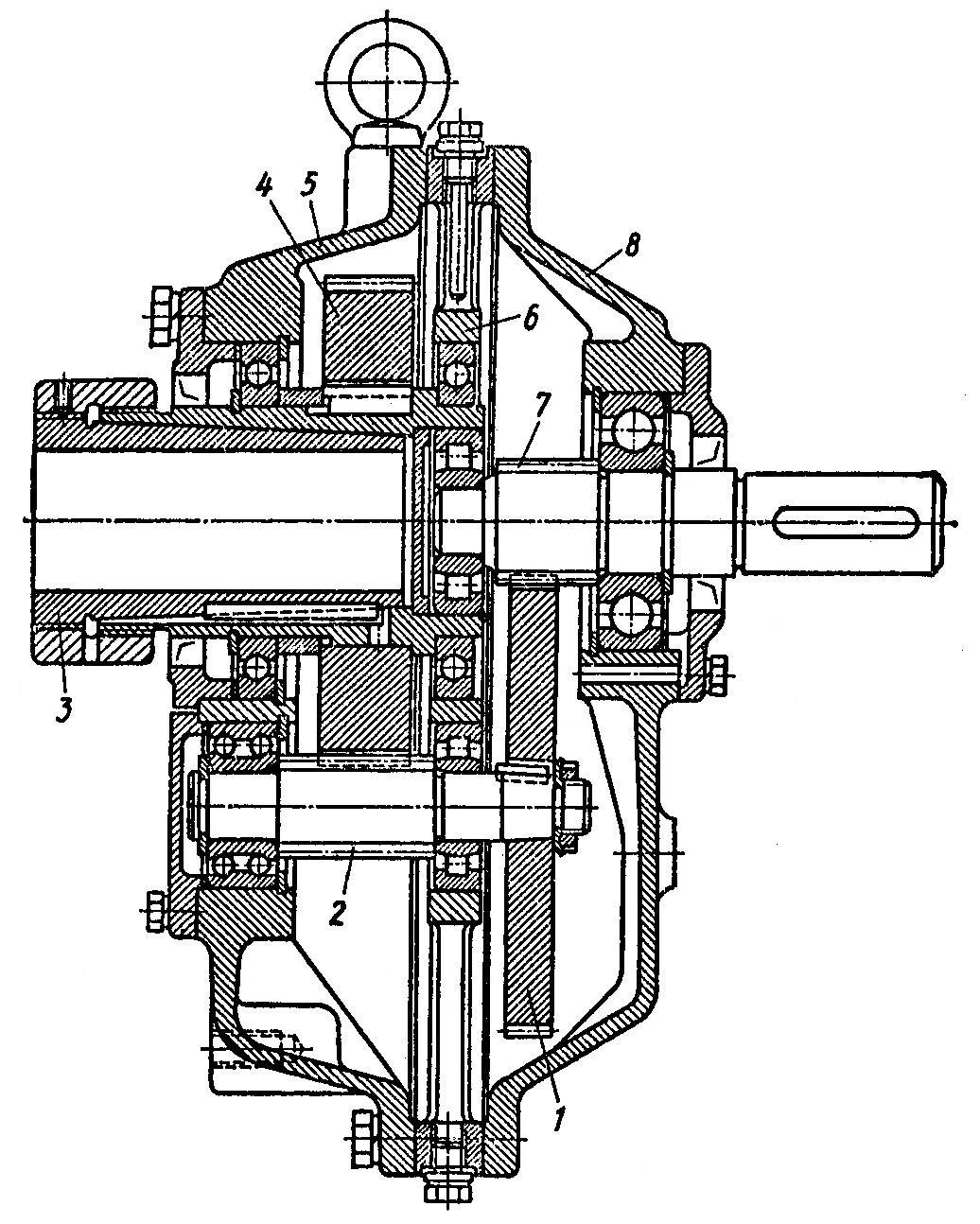
Рисунок 1.16.
Н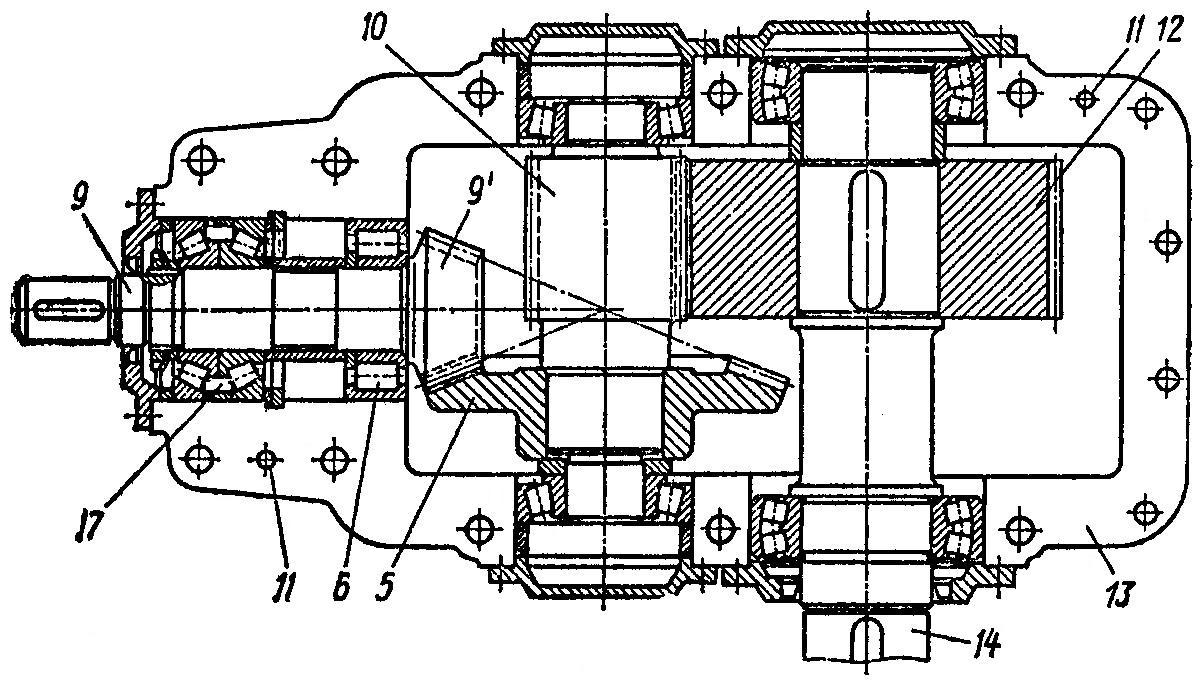 а
рисунке 1.17 – редуктор, у которого оси
входного и выходного валов пересекаются.
Он составлен из двух зубчатых пар:
конической 9-15 и цилиндрической 10-12.
Коническая шестерня 9 – выполнена как
единое целое с валом 9, а цилиндрическая
шестерня 10 – как единое целое с
промежуточным валом, с которым посредством
посадки с натягом соединено коническое
колесо 15.
а
рисунке 1.17 – редуктор, у которого оси
входного и выходного валов пересекаются.
Он составлен из двух зубчатых пар:
конической 9-15 и цилиндрической 10-12.
Коническая шестерня 9 – выполнена как
единое целое с валом 9, а цилиндрическая
шестерня 10 – как единое целое с
промежуточным валом, с которым посредством
посадки с натягом соединено коническое
колесо 15.
Рисунок 1.17.
Колесо 12 соединено с выходным валом 14. Вал-шестерня 9 установлена в подшипниках, из которых радиальный роликовый подшипник 16 воспринимает только радиальную нагрузку, а радиально-упорный конический подшипник 17 – осевую и радиальную нагрузку. Корпус 13 выполнен разъёмным в плоскости осей зубчатых пар. Верхняя и нижняя части корпуса соединены болтами, а точность с помощью штифтов 11.
На рисунке 1.18 показан планетарный редуктор несущего винта вертолёта, в основу которого положена замкнутая передача. Требования к габаритам и массе обусловили его сравнительно сложную конструкцию.
Ведущий вал 19 соединен с центральным, колесом а1 первого механизма. Центральное колесо с внутренними зубьями b1 этого механизма соединено с центральным колесом с внешними зубьями а2 второго механизма, а водило h1 с колесом b2 и ведомым валом 22. Водило h2 соединено с корпусом 20.
Передаточное отношение редуктора
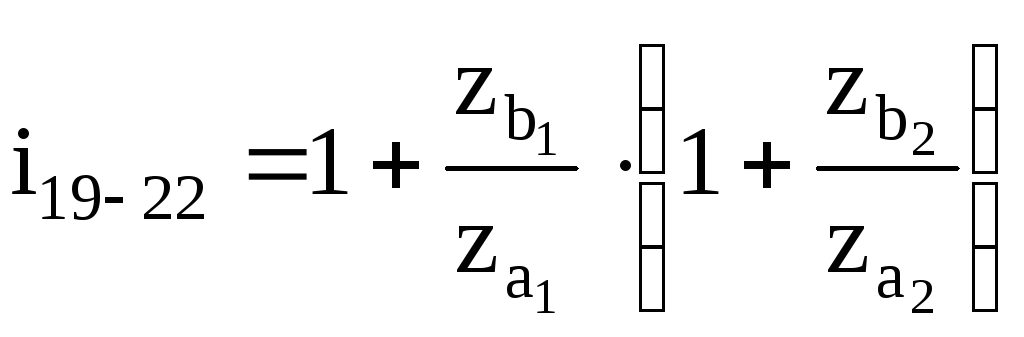
![]() ,
,
где z – число зубьев колес с соответствующими индексами.
Ведущий вал 19 установлен на подшипниках 26 и 25, расположенных в деталях корпуса 18 и 20 соответственно. Ведомый вал 22 установлен на подшипниках 27 и 23, расположенных в корпусных деталях 18 и 21 соответственно. Подшипник 23 наряду с радиальной нагрузкой полностью воспринимает внешнюю осевую нагрузку.
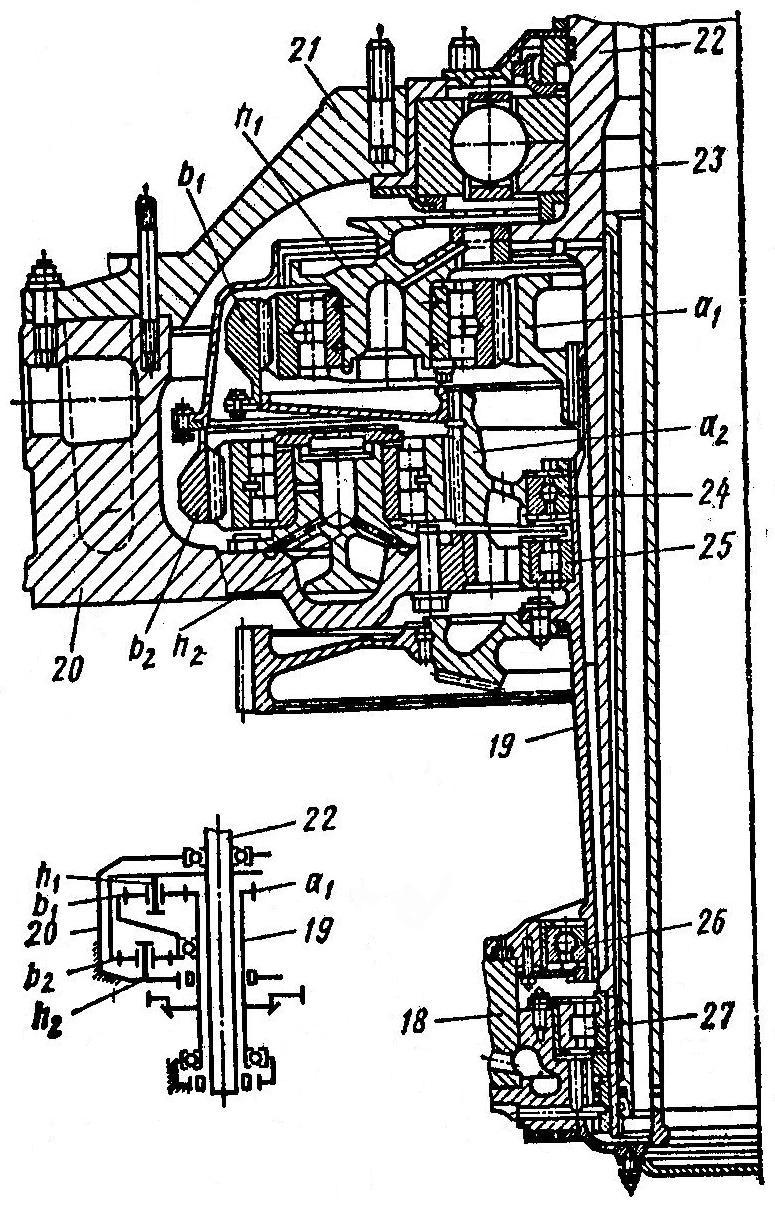
Рисунок 1.18.
Центральное колесо а2 установлено на подшипнике 24. Второй опорой ему служат сателлиты второго механизма, а с колесом b1 оно связано зубчатой муфтой. Самоустановка колес b1 и b2 осуществляется за счет тонкостенных упругих элементов их связи с другими звеньями. Водила имеют консольные оси сателлитов. В сателлиты встроены роликовые подшипники. Водила имеют повышенную жесткость в основании консольных осей благодаря выполнению ребер таврового сечения.
На рисунке 1.19 показан редуктор, содержащий коническую и планетарную зубчатые передачи. При последовательном соединении обычно планетарную передачу используют в качестве последней ступени редуктора нагруженной наибольшим моментом. В этом случае получаются меньшие габаритные размеры.
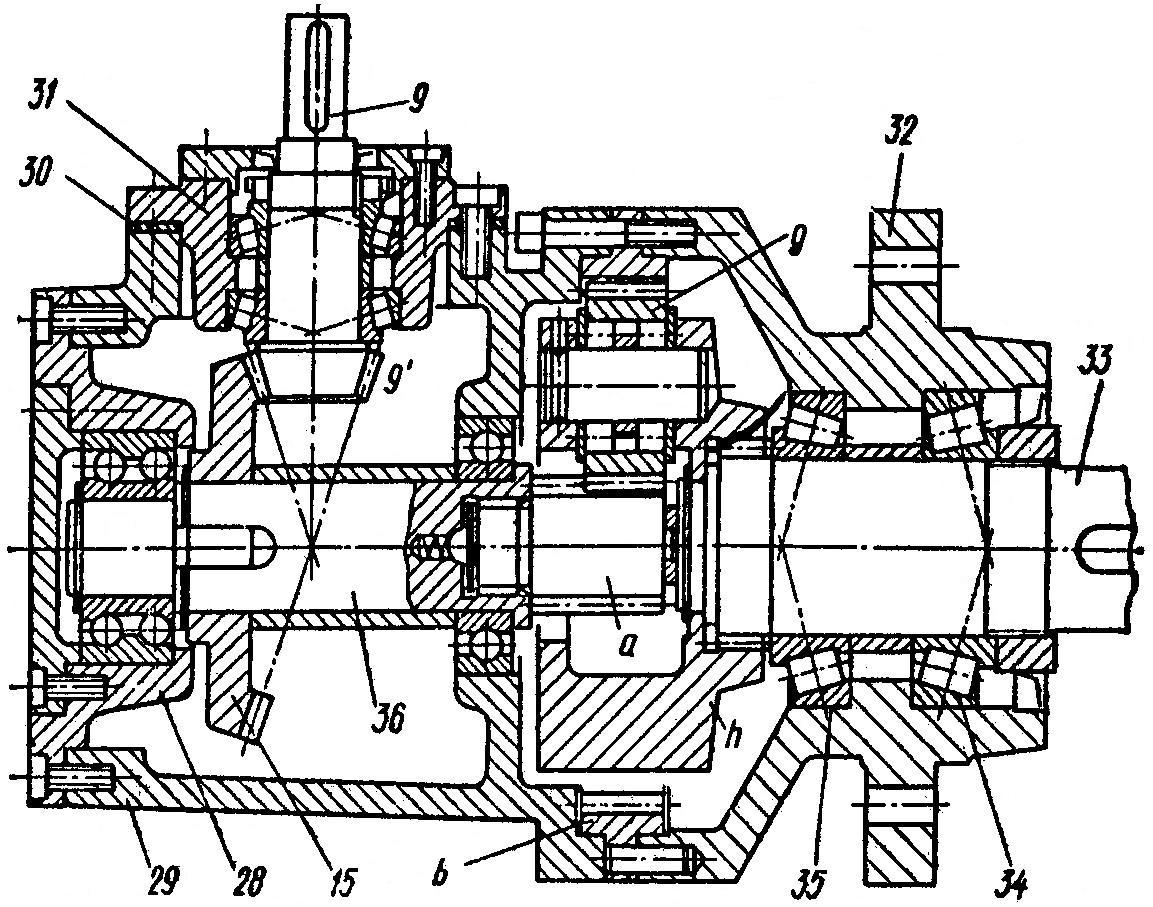
Рисунок 1.19.
Схема, представленная на рисунке 1.19 рассчитана на меньшую мощность привода и меньший момент на выходном валу 33 в сравнении со схемой на рисунке 1.18, что предопределило более простые очертания сечений' ее деталей.
Особенностью этой конструкции является блочность компоновки. Вал-шестерня 9 установлена во втyлкe 31 на конических подшипниках. Сборочную единицу в составе деталей 9 и 31 прифланцовывают к корпусу 29. Коническое колесо 15, закрепленное на валу 36, вместе с подшипниками и опорной деталью 28 также представляют собой сборочную единицу, устанавливаемую в корпусе 29 путем осевого перемещения (на схеме слева направо). Зазор в зацеплении конической передачи регулируют прокладкой 30. Вал 36 соединен с центральным колесом а планетарной передачи с помощью зубчатой муфты Аналогично соединено, водило h с выходным валом 33. Сателлиты g установлены на роликовых подшипниках без внутренних и внешних колец. Вал 33 установлен в опорной части корпуса 32 на конических подшипниках 34 и 35. Подшипники как входного, так и выходного валов расположены таким образом, чтобы иметь наибольшую жесткость при приложении консольной силы на вал. Корпус 29 жестко соединен с центральным колесом b и опорной частью 32.