

В.П. Ившин, М.Ю. Перухин, И.А. Дюдина, А.В. Фафурин
Интеллектуальная автоматика в курсовых и дипломных проектах
Глава 2. Система автоматического регулирования технологических
ПАРАМЕТРОВ (САР)
Автоматическое регулирование параметра – это операция автоматического изменения регулируемой величины по какому-либо закону.
САР могут быть:
-
САР стабилизации – это поддержание регулируемого параметра на нужном фиксированном значении (в нефтехимии используется чаще всего);
-
САР программного управления – значение регулируемого параметра может изменяться по программе;
-
САР следящего регулирования - значение регулируемого параметра может изменяться в зависимости от других параметров.
§1. Структура сак и сар
Структура САК: объект контроля, обобщённый датчик Доб, канал связи, вторичный прибор (контроллер, ПК).
Структура САР: объект регулирования, обобщённый датчик Доб, канал связи, вторичный прибор (ВП, ПК), регулирующее устройство (регулятор, контроллер), исполнительное устройство (исполнительный механизм + регулирующий орган). Здесь обобщенный датчик обозначается – Доб, персональный компьютер – ПК, вторичный прибор (ВП). В роли регулирующего устройства применяются регуляторы и программируемые контроллеры.
Рассмотрим процесс стабилизации температуры выходящего из теплообменника целевого продукта в точке А.
Горячий целевой продукт (120ºС) поступает из соседнего цеха и охлаждается хладагентом до 100ºС (в точке А).
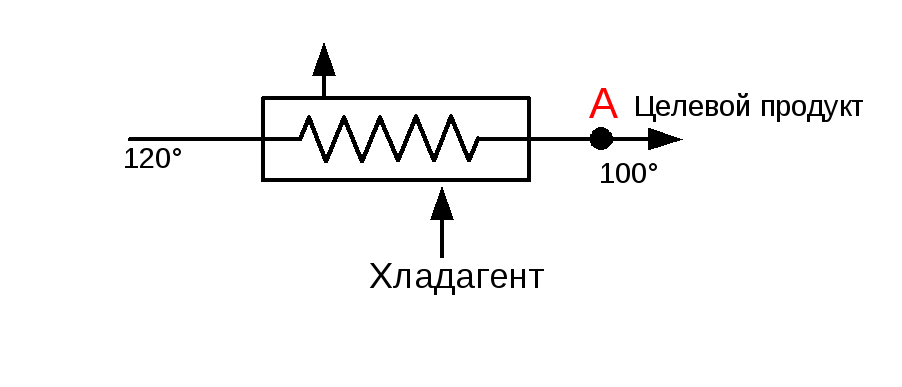
В данной схеме регулирования - температура целевого продукта на входе в теплообменник всегда 120ºС, расход целевого продукта не меняется, температура хладагента на входе в теплообменник не меняется, расход хладагента на входе в теплообменник не меняется.
Температура целевого продукта на выходе из теплообменника в точке А будет 100°С, до тех пор пока не изменится температура целевого продукта на входе в теплообменник (120ºС). Как только величина 120ºС изменится, данная схема регулирования перестаёт работать. В этом случае надо будет изменить расход хладагента на входе в теплообменник, а на трубе подачи хладагента нет клапана.
Таким образом, данная схема регулирования должна быть усовершенствована. В результате получим схему регулирования (рис. 1.1).
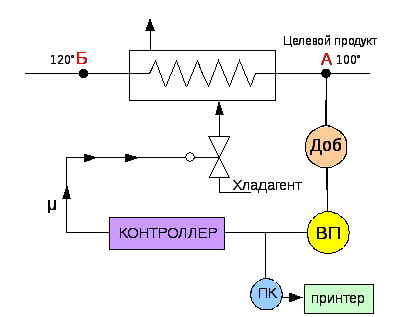
Рис.1.1. САР температуры целевого продукта.
Итак, необходимо стабилизировать температуру в точке А объекта регулирования на уровне 100ºС – это заданное значение регулируемого параметра. Та температура, которая будет в точке А на самом деле, называется текущим значением регулируемого параметра. Текущее значение регулируемого параметра воспринимается обобщенным датчиком и преобразуется им в унифицированный выходной сигнал. Этот унифицированный сигнал поступает на вторичный прибор и регулирующее устройство – контроллер. Вторичный прибор показывает текущее значение целевого продукта в точке А. Например, текущее значение регулируемого параметра 90°С поступает на контроллер, а в нём заложена величина заданного значения температуры в точке А 100°С. Контроллер в соответствии с программой подсчитывает сигнал рассогласования σ = Ттек – Тзад, то есть
σ = 90 ºС – 100 ºС = –10 ºС.
Сигнал рассогласования σ считается входным сигналом регулирующего устройства. Регулятор анализирует величину и знак σ и по программе в соответствии со своим законом регулирования вырабатывает регулирующее воздействие μ. Выходным сигналом является μ, которое определяет закон перемещения затвора регулирующего органа. В данном случае Ттек=90ºС, а надо 100ºС, следовательно, затвор регулирующего органа в соответствии с величиной и знаком σ переместится и уменьшит подачу хладагента. Если же из соседнего цеха в точку Б придет целевой продукт с температурой 150ºС, то, если не принять мер, в точке А вместо 100ºС будет, например, 130ºС. Данная система регулирования приведет в норму температуру в точке А, в точке А будет 100ºС. Произойдёт это за счёт увеличения подачи хладагента. Затвор исполнительного устройства в соответствии с величиной и знаком σ переместится и увеличит подачу хладагента.
Температура целевого продукта в точке Б – это главное возмущающее воздействие. Регулятор в ответ вырабатывает регулирующее воздействие μ.
Итак, на объект регулирования действуют 2 воздействия: возмущающее и регулирующее. Задачей САР является компенсировать влияние возмущающего воздействия на объект регулирующим воздействием. В результате этой компенсации происходит переходный процесс регулирования. Изменение во времени регулируемой величины в переходном процессе происходит за время регулирования τр.
Виды переходных процессов
Существует несколько видов переходных процессов. После возмущения, нанесенного на объект регулирования, возвращение регулируемого параметра к номиналу в устойчивой САР происходит не сразу, а за время τр, называемое временем регулирования.
Переходный процесс изображается графически. Если обозначить ∆у как отклонение величины регулируемого параметра от заданного значения, то возникают 4 возможных вида переходного процесса (а, б – для устойчивых САР; в, г – для неустойчивых САР).
а) б)

в) г)
а) Апериодический сходящийся переходный процесс.
б) Затухающий колебательный переходный процесс.
в) Незатухающий колебательный процесс.
г) Расходящийся колебательный процесс.
Переходные процессы в САР возникают не только при появлении возмущающего воздействия, но и при перенастройке системы на новое задание.
Требования к САР
1. САР должна быть устойчивой и должно быть малое τр;
2. В устойчивых САР при одинаковых τр качество регулирования будет лучше у той САР, где меньше ∆уmax и меньшее количество колебаний.
3. После завершения переходного процесса регулируемая величина не возвращается точно к заданному значению, а имеет место статическая погрешность регулирования δ. Чем она меньше, тем качественнее САР.
Некоторые определения
Системы, в которых для приведения в действие регулирующего органа, используется энергия, непосредственно развиваемая измерительным устройством, называются системами регулирования прямого действия. Если для приведения в действие регулирующего органа используется энергия постороннего источника, то такие САР называются системами регулирования косвенного действия. В основном, в производстве наиболее часто встречаются САР косвенного действия. Соответственно регуляторы косвенного действия различаются по виду используемой внешней энергии на электрические, пневматические и гидравлические.
Число элементов в САР косвенного действия равно числу элементов в САР прямого действия плюс преобразователи, усилители, сервоприводы.
САР непрерывного и прерывного действия
В САР непрерывного действия при непрерывном изменении регулируемого параметра регулирующий орган перемещается непрерывно.
В САР прерывного действия при непрерывном изменении регулируемого параметра регулирующий орган перемещается прерывно. Соответственно САР прерывного действия делятся на: САР импульсные, САР релейные (позиционные).
В импульсных САР при непрерывном изменении регулируемого параметра регулирующий орган воздействует на объект отдельными импульсами. Период чередования импульса задается принудительно.
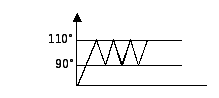
В релейных САР регулирующий орган воздействует только тогда, когда непрерывно изменяющаяся регулируемая величина достигает определенного значения или определенных значений. Частный случай релейных САР – двухпозиционная САР. Например, изменение температуры в сауне по времени τ в диапазоне двух уставок (90-110)0С (рис.1.2). В качестве регулирующего органа в сауне используется контактная пара для включения и выключения ТЭНа. Регулирующий орган имеет всего 2 положения - контактная пара включена и выключена.
 τ
τ
Рис.1.2. Изменение температуры в сауне по времени τ.
На практике чаще всего встречаются объекты с несколькими регулируемыми параметрами. Например, в аппарате надо поддерживать постоянное давление и при этом определенный температурный режим. Когда САР различных параметров связаны между собой через объект, то такие САР называются системами связанного регулирования.
Статическая и астатическая САР
САР, в которых в установившихся состояниях существует однозначная зависимость между уровнем регулируемого параметра и нагрузкой, называются статическими. Основным свойством статических САР является поддержание конкретного уровня параметра в соответствии с нагрузкой.
Пусть регулируемой величиной является давление (Р) водопроводной воды в трубопроводе в жилом доме. Давление в такой системе пусть поддерживается статической САР (рис.1.3), т.е. определенной нагрузке соответствует одно и только одно определенное значение давления. Нагрузка – потребление воды домохозяйками. В случае реализации статической САР в садоводстве дополнительных расходов нет. Однажды залили бочку водой и пользуемся, пока бочка не опустеет.

Рис.1.3. Статическая характеристика статической САР.
САР, в которых зависимость между уровнем параметра и нагрузкой многозначна (неоднозначна), называются астатическими.
Пусть регулируемой величиной является давление (Р) водопроводной воды в трубопроводе в жилом доме. Если давление в такой системе поддерживается астатической САР (рис.1.4), то давление водопроводной воды в трубе будет поддерживаться на одном и том же уровне независимо от числа домохозяек, потребляющих в данный момент воду, т.е. независимо от нагрузки. Разумеется, реализация астатической САР обойдётся дороже, чем статической САР. Для поддержания постоянного уровня поливной воды в общей садоводческой бочке независимо от нагрузки необходимо своевременно подкачивать в бочку воду из Волги. Для этого нужен насос, шланг. А это уже дополнительные расходы.
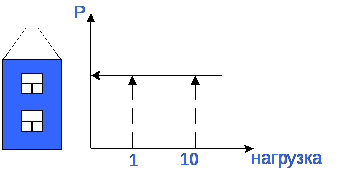
Рис.1.4. Статическая характеристика астатической САР.
Принципы регулирования
Известны следующие принципы регулирования:
По отклонению (принцип Ползунова-Уатта);
По возмущению (Понселе);
Комбинированный (по отклонению и возмущению);
По производной (принцип братьев Сименс).
Рассмотрим первых три принципа регулирования.
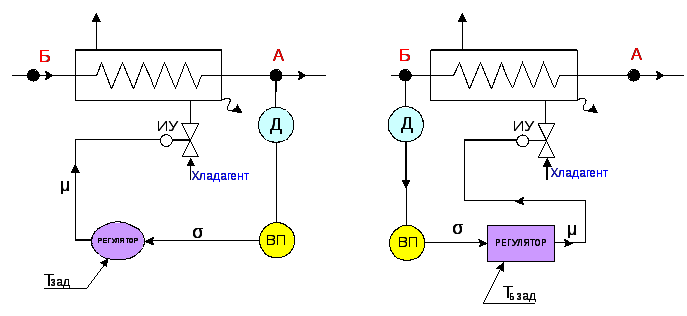
По отклонению По возмущению
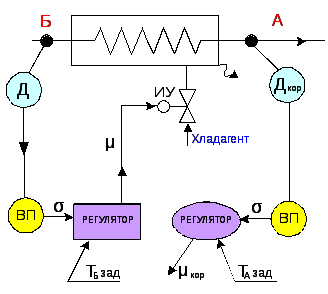
Комбинированный
Цель этих трех принципов одна и та же – стабилизировать температуру целевого продукта в точке А на уровне, например 100ºС.
Итак, рассмотрим по порядку.
САР по отклонению. Она замкнутая, потому что регулируемый параметр - температура целевого продукта в точке А и регулятор связаны каналом связи. Это САР с так называемой отрицательной обратной связью, т.к. выходной сигнал регулятора компенсирует влияние возмущающего воздействия, т.е. со знаком «–» по сравнению с возмущающим воздействием.
Достоинства. Принцип широко распространен, т.к. САР по отклонению имеет ценное свойство – регулятор воздействует на объект таким образом, чтобы устранить погрешность регулирования независимо от того, какими возмущающими действиями она вызвана. Это свойство САР особенно ценно в промышленных условиях, где число возмущающих воздействий может быть велико. В нашем случае, помимо главного возмущающего воздействия, т.е. изменения ТБ, могут быть побочные воздействия. Например, прохудение теплообменника из-за ржавчины, т.е. потери хладагента, также из-за наличия осадка солей на стенках теплообменника – ухудшение теплообмена.
Недостаток. САР инерционна.
САР по возмущению. Здесь расход хладагента автоматически меняется в зависимости от температуры целевого продукта на его входе, т.е. в зависимости от величины главного возмущающего воздействия.
Достоинства. Успеваем среагировать на главное возмущающее воздействие и скомпенсировать его влияние на температуру ТА ещё до того, как температура в точке А изменилась бы.
Недостаток. Эта САР разомкнута, а именно, отсутствует связь регулятора с результатом его работы, т.е. с точкой А нет канала связи (т.е. САР беззащитна перед побочными возмущающими воздействиями).
Комбинированная САР. Использованы достоинства предыдущих двух схем. Для компенсации главного возмущающего воздействия (изменение ТБ) используется САР по возмущению. Для компенсации остальных возмущающих воздействий берется от САР по отклонению корректирующий контур, выходной сигнал которого поступает в виде корректирующего задания основному регулятору, т.е. корректируется задание ТБ.