

1. Начальной
2. Делительной
3. Основной
4. Впадин
Вопрос 30. Какому значению коэффициента перекрытия соответствует диаграмма давлений, показанная на рисунке?

Ответы:
1. Коэффициент перекрытия e <1,5
2. Коэффициент перекрытия 1,5 < e < 2
3. Коэффициент перекрытия e = 1
4. Коэффициент перекрытия e = 2
Вопрос 31. Чему равен модуль нормального зубчатого колеса, если Z = 18, da = 100 мм?
Ответы:
1. m = 6 мм
2. m = 4 мм
3. m = 5 мм
4. m = 3 мм
Вопрос 32. Чему равно максимальное значение коэффициента перекрытия прямозубой цилиндрической передачи внешнего зацепления ?
Ответы:
1. e = 1,5
2. e = 1,98
3. e = 2,0
4. e = 1,2
Вопрос 33. Для какой передачи коэффициент перекрытия равен сумме торцового и осевого коэффициентов перекрытия?
Ответы:
1. Цилиндрической прямозубой внешнего зацепления
2. Цилиндрической косозубой внешнего зацепления
3. Цилиндрической прямозубой внутреннего зацепления
4. Цилиндрической косозубой внутреннего зацепления
Вопрос 34. Чему равно (по модулю) передаточное отношение зубчатой пары, если угловая скорость ведущего колеса равна 1000 об/мин, а угловая скорость ведомого - 500 об/мин?
Ответы:
1. i = 0,5
2. i = 2,0
3. i = 5,0
4. i = 10,0
Вопрос 35. Чему равен угол зацепления равносмещенной косозубой передачи в торцовом сечении?
Ответы:
1. Больше угла профиля ИПРК
2. Меньше угла профиля ИПРК
3. Равен углу профиля ИПРК
4. Равен углу зацепления прямозубой передачи
Вопрос 36. Стандартный коэффициент радиального зазора для нормального зубчатого колеса равен:
Ответы:
1. 0,2
2. 0,25
3. 0,3
4. 1,0
Вопрос 37. Полное передаточное отношение паразитного рядового зацепления, состоящее из n зубчатых колес (m – число внешних зацеплений), равно:
Ответы:
1.
![]()
2.
![]()
3.
![]()
4.
![]()
Вопрос 38. Какая информация не верна?
Ответы:
1. эвольвента не имеет точек внутри основной окружности
2. нормаль к эвольвенте в любой ее точке является касательной к основной окружности
3. длина касательной от точки касания до эвольвенты является радиусом кривизны эвольвенты
4. инволюта – это основная окружность по отношению к эвольвенте
Вопрос 39. Какое из утверждений не верно?
Ответы:
Паразитные колеса в рядовом зацеплении дают возможность изменить направление вращения ведомого звена
Паразитные колеса в рядовом зацеплении не влияют на величину передаточного отношения
Паразитные колеса в рядовом зацеплении дают возможность уменьшить габаритные размеры механизма
Паразитные колеса в рядовом зацеплении увеличивают потери на трение
Вопрос 40. Эвольвентная функция определяется следующим выражением:
Ответы:
![]()
![]()
![]()
![]()
Вопрос 41. Числа зубьев колес одноступенчатой
зубчатой передачи равны: z1=20, z2=80. Чему
равно отношение угловых скоростей
![]()
Ответы:
16
4
6
0,25
Вопрос 42. Шаг зубчатого колеса по делительной окружности определяется через модуль m зацепления и число p соотношением:
Ответы:
![]()
![]()
![]()
![]()
Вопрос 43. Какое из утверждений не верно?
Ответы:
делительная окружность делит зуб на две части: головку и ножку
коэффициент скольжения в полюсе равен нулю
инволюта – это эвольвентная функция
длина активной линии зацепления больше длины теоретической линии
Вопрос 44. Укажите неверное утверждение
Ответы:
линия зацепления – это геометрическое место точек контакта сопряженных эвольвентных профилей
головка зуба изнашивается быстрее, чем ножка
основная и делительная окружности совпадают
угол зацепления – угол между линией зацепления и прямой, перпендикулярной межосевой линии
Тема "Силовой расчет механизмов"
Вопрос 1. На каком принципе или законе основан кинетостатический расчет механизмов?
Ответы:
Принцип возможных перемещений
Принцип Даламбера
Закон сохранения механической энергии
Закон о равенстве сил действия и противодействия
Вопрос 2. На каком принципе или законе основан метод "жесткого рычага" Жуковского?
Ответы:
Принцип Даламбера
Закон сохранения механической энергии
Закон о равенстве сил действия и противодействия
Принцип возможных перемещений
Вопрос 3. "Если ко всем силам, действующим на механизм, добавить силы инерции его звеньев, то механизм будет находиться в равновесии". Что это?
Ответы:
Принцип Даламбера
Принцип возможных перемещений
Закон сохранения механической энергии
Закон о равенстве сил действия и противодействия
Вопрос 4. К чему приводятся элементарные силы инерции звена, совершающего равномерное вращательное движение вокруг оси, не проходящей через центр тяжести звена?
Ответы:
К главному вектору сил инерции
К главному моменту сил инерции
К главному вектору и главному моменту сил инерции
Не выполняется приведение элементарных сил инерции
Вопрос 5. К чему приводятся элементарные силы инерции звена, совершающего неравномерное вращательное движение вокруг оси, не проходящей через центр тяжести звена?
Ответы:
К главному вектору сил инерции
К главному моменту сил инерции
К главному вектору и главному моменту сил инерции
Не выполняется приведение элементарных сил инерции
Вопрос 6. К чему приводятся элементарные силы инерции звена, совершающего плоскопараллельное движение?
Ответы:
К главному вектору сил инерции
К главному моменту сил инерции
К главному вектору и главному моменту сил инерции
Не выполняется приведение элементарных сил инерции
Вопрос 7. К чему приводятся элементарные силы инерции звена, совершающего поступательное движение?
Ответы:
К главному вектору сил инерции
К главному моменту сил инерции
К главному вектору и главному моменту сил инерции
Не выполняется приведение элементарных сил инерции
Вопрос 8. К чему приводятся элементарные силы инерции звена, совершающего неравномерное вращательное движение при совпадении центра тяжести с центром вращения звена?
Ответы:
К главному вектору сил инерции
К главному моменту сил инерции
К главному вектору и главному моменту сил инерции
Не выполняется приведение элементарных сил инерции
Вопрос 9. Почему момент сил инерции кривошипа, совершающего равномерное вращательное движение, равен нулю?
Ответы:
Равно нулю угловое ускорение звена
Равен нулю момент инерции массы звена
Равно нулю ускорение центра тяжести звена
Равна нулю сила инерции звена
Вопрос 10. Что является неизвестным при определении реакции во вращательной паре?
Ответы:
Величина и точка приложения
Величина и направление
Направление и точка приложения
Только величина
Вопрос 11. Что является неизвестным при определении реакции во поступательной паре?
Ответы:
Величина и точка приложения
Величина и направление
Направление и точка приложения
Только величина
Вопрос 12. В чем заключается условие статической определимости групп Ассура?
Ответы:
Степень подвижности группы Ассура равна нулю
Число уравнений статики для группы Ассура равно числу неизвестных
Число уравнений статики для группы Ассура не равно числу неизвестных
Группа Ассура - это группа подвижных звеньев
Вопрос 13. В какой последовательности выполняется силовой расчет механизма?
Ответы:
Начиная с группы начального звена
Начиная со звена, к которому приложена движущая сила или сила полезного сопротивления
Начиная с группы, наиболее удаленной от группы начального звена
Последовательность расчета не имеет значения
Вопрос 14. Из какого уравнения статики находят нормальные составляющие реакций в кинематических парах в группе Ассура с тремя вращательными парами?
Ответы:
Уравнение моментов всех сил для звена относительно внутренней кинематической пары
Уравнение моментов всех сил для группы относительно внутренней кинематической пары
Уравнение равновесия одного из звеньев
Уравнение равновесия для всей группы
Вопрос 15. Из какого уравнения статики находят тангенциальные составляющие реакций в кинематических парах в группе Ассура с тремя вращательными парами?
Ответы:
Уравнение моментов всех сил для звена относительно внутренней кинематической пары
Уравнение моментов всех сил для группы относительно внутренней кинематической пары
Уравнение равновесия одного из звеньев
Уравнение равновесия для всей группы
Вопрос 16. Из какого уравнения статики находят реакции во внутренних кинематических парах групп Ассура?
Ответы:
Уравнение моментов всех сил для звена относительно внутренней кинематической пары
Уравнение моментов всех сил для группы относительно внутренней кинематической пары
Уравнение равновесия одного из звеньев
Уравнение равновесия для всей группы
Вопрос 17. Какая сила определяется по методу "жесткого рычага" Жуковского?
Ответы:
Движущая сила
Сила полезного сопротивления
Уравновешивающая сила
Сила инерции
Вопрос 18. Какие силы являются основными расчетными нагрузками, если сила полезного сопротивления мала, а ускорения звеньев значительны?
Ответы:
Силы тяжести
Силы трения
Силы упругости
Силы инерции
Вопрос 19. Какие силы не определяются методом "жесткого рычага" Жуковского?
Ответы:
Движущая сила
Уравновешивающая сила
Уравновешивающий момент
Реакции в кинематических парах
Вопрос 20. Как направлен главный вектор сил инерции шатуна АВ?
Ответы:
В сторону, противоположную ускорению точки А
В сторону, противоположную ускорению точки В
Перпендикулярно к звену АВ
В сторону, противоположную ускорению центра тяжести звена АВ
Вопрос 21. Как направлен главный момент сил инерции шатуна АВ?
Ответы:
В сторону, противоположную угловой скорости звена АВ
В сторону углового ускорения звена АВ
В сторону, противоположную угловому ускорению звена АВ
В сторону угловой скорости звена АВ
Вопрос 22. Каким моментом является уравновешивающий момент?
Ответы:
Движущим моментом для механизма машины двигателя
Движущим моментом для механизма рабочей машины
Моментом сопротивления для механизма машины двигателя
Моментом сопротивления для механизма рабочей машины
Вопрос 23. Что не требуется для определения уравновешивающего момента по методу "жесткого рычага" Жуковского?
Ответы:
Построения плана скоростей механизма
Нагружения "рычага" Жуковского силами, под действием которых механизм находится в состоянии равновесия
Определения реакций в кинематических парах механизма
Составления уравнения равновесия "жесткого рычага"
Вопрос 24. Какое утверждение является неправильным?
Ответы:
Движущая сила приложена к ведущему звену и ее направление совпадает с направлением движения ведущего звена
Движущая сила приложена к ведомому звену и ее направление совпадает с направлением движения ведомого звена
Сила полезного сопротивления приложена к ведущему звену и ее направление совпадает с направлением движения ведущего звена
Сила полезного сопротивления приложена к ведомому звену и направлена в сторону, противоположную направлению движения ведомого звена
Вопрос 25. При силовом расчете плоских рычажных механизмов с низшими парами всю кинематическую цепь делят на следующие составные части:
Ответы:
звено
деталь
структурные группы и механизмы 1-го класса
система из двух звеньев, скрепленных кинематическими парами
Вопрос 26. Коэффициент полезного действия при последовательном соединении машин определяется по формуле (hi – коэффициент полезного действия i-й машины, li – доля энергии, которая затрачивается на функционирование i-й машины):
Ответы:
![]()
![]()
![]()
![]()
Вопрос 27. Укажите силу технологического сопротивления:
Ответы:
сила тяжести груза, поднимаемого мостовым краном
сила инерции звена
сила трения между поршнем и цилиндром двигателя внутреннего сгорания
сила, обусловленная давлением газа на поршень двигателя внутреннего сгорания
Вопрос 28. Какие из сил, действующих на звенья механизма, возникают только при его движении?
Ответы:
силы трения
силы упругости пружин
усилия в кинематических парах
силы инерции звеньев
Вопрос 29. Какие из сил остаются постоянными во всех положениях механизма?
Ответы:
силы инерции
силы упругости пружин
силы тяжести
реакции в кинематических парах
Вопрос 30. Метод рычага Жуковского основан на
Ответы:
равенстве работ на возможных перемещениях механизма и модели
равенстве мощностей, развиваемых механизмом и его моделью
равенстве угловых скоростей модели и ведущего звена
равенстве линейных скоростей модели и механизма
Тема "Кинематический анализ рычажных механизмов"
Вопрос 1. Какой из методов кинематического анализа дает наибольшую точность?
Ответы:
1. Графический
2. Аналитический
3. Графо-аналитический
4. Экспериментальный
Вопрос 2. Векторы каких скоростей (ускорений) исходят из полюса плана скоростей (плана ускорений)?
Ответы:
1. Абсолютных скоростей
2. Относительных скоростей
3. Абсолютных ускорений
4. Относительных ускорений
Вопрос 3. Как направлен вектор скорости точки А кривошипа ОА при известном направлении его вращения?
Ответы:
1. Параллельно звену ОА к центру вращения
2. Перпендикулярно к звену ОА в сторону его вращения
3. Параллельно звену ОА в сторону от центра вращения
4. Перпендикулярно к звену ОА в сторону, противоположную его вращению
Вопрос 4. Как направлено ускорение точки А кривошипа ОА, если его угловая скорость постоянна?
Ответы:
1. Параллельно звену ОА к центру вращения
2. Перпендикулярно к звену ОА в сторону его вращения
3. Параллельно звену ОА в сторону от центра вращения
4. Перпендикулярно к звену ОА в сторону, противоположную его вращению
Вопрос 5. Какой вектор на плане скоростей изображает относительную скорость звена АВ?

Ответы:
1. Вектор Пa
2. Вектор Пb
3. Вектор Пc
4. Вектор ab
Вопрос 6. Какой вектор на плане скоростей изображает скорость точки С звена АВ?

Ответы:
Вектор Пa
Вектор Пb
Вектор Пc
Вектор ab
Вопрос 7. С помощью какой скорости можно определить угловую скорость звена АВ?

Ответы:
Скорость точки А
Скорость точки B
Скорость точки C
Относительная скорость звена АВ
Вопрос 8. Для какого положения механизма скорость точки А равна скорости точки В?

Ответы:
Положение 1
Положение 2
Положение 3
Положение 4
Вопрос 9. Для какого положения механизма скорость точки В равна нулю?
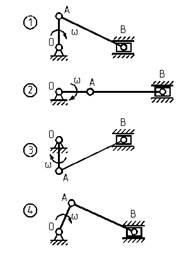
Ответы:
Положение 1
Положение 2
Положение 3
Положение 4
Вопрос 10. Для какого положения механизма скорость точки А равна относительной скорости звена АВ?

Ответы:
Положение 1
Положение 2
Положение 3
Положение 4
Вопрос 11. Для какого положения механизма относительная скорость звена АВ равна нулю?

Ответы:
1. Положение 1
2. Положение 2
3. Положение 3
4. Положение 4
Вопрос 12. С помощью какого ускорения можно определить угловое ускорение звена АВ?

Ответы:
1. Ускорение точки А
2. Нормальная составляющая относительного ускорения звена АВ
3. Тангенциальная составляющая относительного ускорения звена АВ
4. Ускорение точки В
Вопрос 13. Направлением какого ускорения определяется направление углового ускорения звена АВ?

Ответы:
1. Нормальной составляющей относительного ускорения звена АВ
2. Тангенциальной составляющей относительного ускорения звена АВ
3. Полного относительного ускорения звена АВ
4. Ускорения точки В
Вопрос 14. Для какого положения механизма угловая скорость звена АВ равна нулю?

Ответы:
1. Положение 1
2. Положение 2
3. Положение 3
4. Положение 4
Вопрос 15. Для какого положения механизма угловое ускорение звена АВ равна нулю?

Ответы:
1. Положение 1
2. Положение 2
3. Положение 3
4. Положение 4
Вопрос 16. Угловая скорость кривошипа рычажного механизма постоянна. Угловое ускорение какого звена этого механизма будет равно нулю?
Ответы:
1. Шатуна
2. Коромысла
3. Кривошипа
4. Ползуна
Вопрос 17. Для какого звена необходимо определять ускорение Кориолиса?
Ответы:
1. Звена, совершающего вращательное движение
2. Звена, совершающего поступательное движение
3. Звена, совершающего сложное движение
4. Звена, совершающего плоскопараллельное движение
Вопрос 18. Какое положение является крайним ("мертвым") для центрального кривошипно-шатунного механизма?
Ответы:
1. Положение, в котором скорость ползуна является максимальной
2. Положение, в котором скорость ползуна является минимальной
3. Положение, в котором скорость ползуна равна нулю
4. Положение, в котором скорость ползуна является средней между максимальной и минимальной
Вопрос 19. Что не входит в задачи кинематического анализа механизмов?
Ответы:
1. Определение положений звеньев и траекторий точек
2. Определение линейных скоростей и ускорений точек
3. Определение угловых скоростей и ускорений звеньев
4. Определение размеров звеньев механизма
Вопрос 20. Рычажный механизм состоит из группы начального звена и трех групп Ассура. С какой группы следует начинать кинематический расчет этого механизма?
Ответы:
1. С группы начального звена
2. С группы Ассура, соединенной с группой начального звена
3. С группы Ассура, наиболее удаленной от группы начального звена
4. Порядок расчета не имеет значения
Вопрос 21. Какие параметры подлежат определению при кинематическом расчете группы Ассура с тремя вращательными парами аналитическим методом?
Ответы:
1. Координаты внешних кинематических пар
2. Координаты внутренней кинематической пары
3. Длины звеньев группы
4. Угловые положения звеньев
Вопрос 22. Чем определяется показатель сборки при кинематическом расчете группы Ассура с тремя вращательными парами аналитическим методом?
Ответы:
1. Знаком момента вектора группы относительно внутренней кинематической пары
2. Знаком углов поворота звеньев
3. Направлением вектора группы
4. Знаком угла, определяющего угловое положение вектора группы
Вопрос 23. Какие параметры подлежат определению при кинематическом расчете группы Ассура с двумя вращательными и внешней поступательной парами аналитическим методом?
Ответы:
1. Расстояние от начала координат до направляющей
2. Координаты ползуна
3. Координаты внешней вращательной пары
4. Угловое положение шатуна
Вопрос 24. Чем определяется показатель сборки при кинематическом расчете группы Ассура с двумя вращательными и внешней поступательной парами аналитическим методом?
Ответы:
1. Знаком угла поворота оси Y до совмещения ее с единичным вектором n
2. Знаком косинуса угла между осью X' правой системы координат и вектором группы
3. Знаком угла, определяющего угловое положение шатуна
4. Знаком расстояния от начала координат до направляющей
Вопрос 25. Чем определяется направление осей X' и Y' правой системы координат при кинематическом расчете группы Ассура с двумя вращательными и внешней поступательной парами аналитическим методом?
Ответы:
1. Оси X' и Y' сонаправлены с единичными векторами t и n
2. Оси X' и Y' сонаправлены с осями координат X и Y
3. Ось X' сонаправлена с единичным вектором n
4. Ось Y' сонаправлена с единичным вектором t
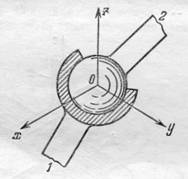
Вопрос 26. Определите класс кинематической пары.

Ответы:
1. 2 класс
2. 3 класс
3. 4 класс
4. 5 класс
Вопрос 27. Определите класс кинематической пары.

Ответы:
1. 2 класс
2. 3 класс
3. 4 класс
4. 5 класс
Вопрос 28. Определите класс кинематической пары.

Ответы:
1. 2 класс
2. 3 класс
3. 4 класс
4. 5 класс
Вопрос 29. Определите класс кинематической пары.

Ответы:
1. 2 класс
2. 3 класс
3. 4 класс
4. 5 класс
Вопрос 30. Определите класс кинематической пары.

Ответы:
1. 2 класс
2. 3 класс
3. 4 класс
4. 5 класс
Вопрос 31. Определите класс кинематической пары образованной звеньями 1 и 2.

Ответы:
1. 2 класс
2. 3 класс
3. 4 класс
4. 5 класс
Вопрос 32. Определите класс кинематической пары.

Ответы:
1. 2 класс
2. 3 класс
3. 4 класс
4. 5 класс
Вопрос 33. Определите класс кинематической пары.
Ответы:
1. 2 класс
2. 3 класс
3. 4 класс
4. 5 класс
Вопрос 34. Определите класс кинематической пары.

Ответы:
1. 2 класс
2. 3 класс
3. 4 класс
4. 5 класс
Вопрос 35. Определите класс кинематической пары.

Ответы:
1. 2 класс
2. 3 класс
3. 4 класс
4. 5 класс
Вопрос 36. Определите класс кинематической пары.

Ответы:
1. 2 класс
2. 3 класс
3. 4 класс
4. 5 класс
Вопрос 37. Определите класс кинематической пары.

Ответы:
1. 2 класс
2. 3 класс
3. 4 класс
4. 5 класс
Вопрос 38. Определите класс кинематической пары.

Ответы:
1. 2 класс
2. 3 класс
3. 4 класс
4. 5 класс
Вопрос 39. Укажите уравнение движения машины при вращательном движении звеньев механизма.
Ответы:
1. Sm(V22-V12)/2=SA
2. Sm(V22-V12)/2=0
3. Sm(V22-V12)/2=Адв-Апс-Авс
4. SJ(ω22-ω12)/2=Aдв-Ас±Аq±Aσ
Вопрос 40. Неравномерность хода машины определяется по следующей формуле:
Ответы:
d=(ωmax-ωmin)/ωср
d=(ωmax-ωmin)/2
d=2ωср/ (ωmax-ωmin)
d=2(ωmax-ωmin)/ωср
Вопрос 41. Какое свойство является главным для определения дифференциального механизма.
Ответы:
число степеней равно единицы
число степеней свободы более единицы
способность замедлять движение
отсутствие подвижности
Вопрос 42. Какое из следующих утверждений верно?
Ответы:
векторы, выходящие из полюса р плана скоростей изображают в масштабе абсолютные скорости соответствующих точек
векторы, проходящие через полюс плана скоростей, соответствуют угловым скоростям звеньев
векторы, не проходящие через полюс плана скоростей, соответствуют угловым скоростям звеньев
векторы, выходящие из полюса р плана скоростей изображают в масштабе относительные скорости
Вопрос 43. Укажите, какая характеристика соответствуют установившемуся движению механизма:
Ответы:
скорость начального звена изменяется произвольно
скорость начального звена постоянна или изменяется периодически и незначительно
скорость начального звена длительное время убывает
скорость начального звена длительное время возрастает
Вопрос 44. Что такое µ в следующем выражении:
![]()
![]()
Ответы:
масштабный коэффициент при построении планов скоростей
величина скорости в миллиметрах чертежа
величина отрезка pvb в миллиметрах чертежа
абсолютная величина вектора скорости точки В
Вопрос 45. За время некоторого целого числа периодов установившегося движения приращение кинетической энергии:
Ответы:
положительно
отрицательно
равно нулю
неизвестно
Вопрос 46. По какой формуле определяется кориолисово ускорение?
Ответы:
![]()
![]()
![]() +
+
![]()
Вопрос 47. По какой формуле определяется нормальное ускорение?
Ответы:
-

-

-
 +
+ -

Вопрос 48. Укажите движущую силу
Ответы:
сила тяжести груза, поднимаемого мостовым краном
сила резания при обработке на токарном станке
сила трения между поршнем и цилиндром двигателя внутреннего сгорания
сила, обусловленная давлением газа на поршень двигателя внутреннего сгорания
Вопрос 49. Как определить угловое ускорение?
Ответы:
![]()

+![]()
![]()