

Классификация выпрямителей
Самым распространенными источниками вторичного электропитания (ИВЭ) являются источники, которые преобразуют электрическую энергию сети переменного тока частотой 50 Гц. Такие источники питания включают в себя выпрямитель и стабилизатор.
Выпрямители бывают неуправляемыми и управляемыми. С помощью неуправляемых выпрямителей на выходе ИВЭ получают постоянное напряжение неизменного значения. Управляемые выпрямители применяют тогда, когда необходимо изменять значение выпрямленного тока или напряжения.
В зависимости от числа фаз первичного источника питания (сети переменного тока) различают однофазные и трёхфазные выпрямители. Выпрямители малой и средней мощности, как правило, являются однофазными, а выпрямители большой мощности – трёхфазными.
По форме выпрямления напряжения выпрямители разделяют на однополупериодные и двухполупериодные. У выпрямителя бывают четыре основных вида нагрузки: активная, активно – индуктивная, активно – ёмкостная, и с противо – Э.Д.С. (когда он питает двигатель постоянного тока или зарядное устройство).
Основные энергетические характеристики выпрямителя
Ими являются:
-
Среднее значение выпрямленного тока и напряжения Iн.ср. и Uн.ср..
-
Мощность нагрузочного устройства Pн.ср.= Iн.ср. · Uн.ср.
-
Амплитуда основного выпрямленного напряжения
 .
. -
Действующие значения тока и напряжения первичной и вторичной обмоток трансформатора
 .
. -
Типовая мощность трансформатора
 .
. -
Коэффициент полезного действия
 ,
где РТР
- потери в трансформаторе, Рд
–
потери в диодах.
,
где РТР
- потери в трансформаторе, Рд
–
потери в диодах.
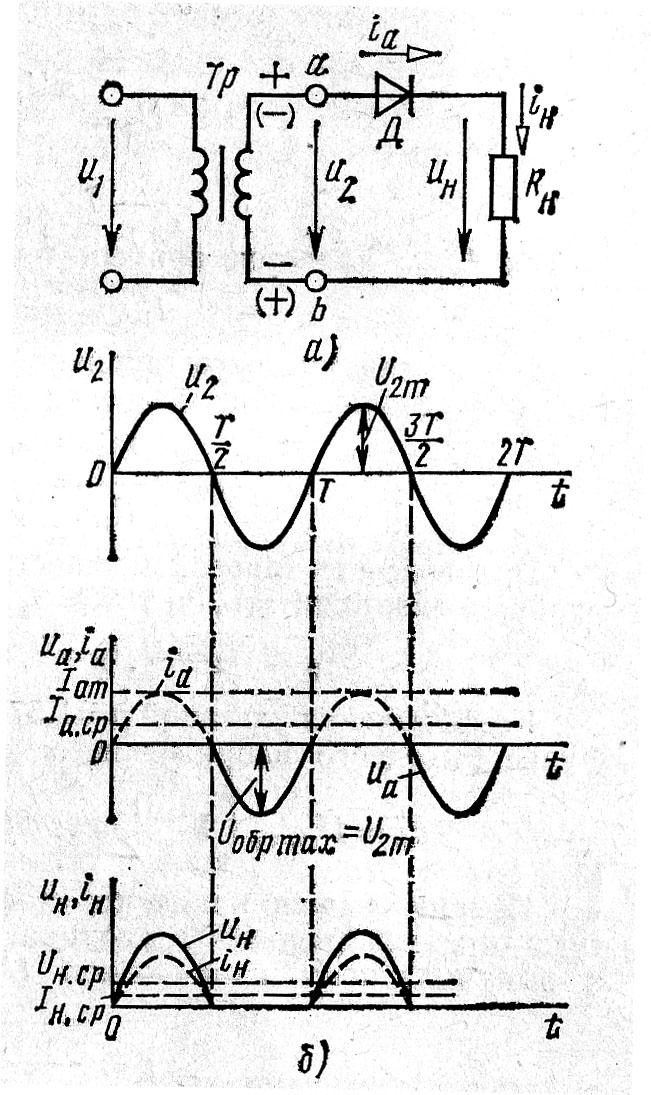
Рисунок 1.8 - Схема (а) и динамические диаграммы напряжений и токов (б)
однополупериодного выпрямителя
Для однополупериодного выпрямителя
 .
.
Прямой ток диода
 .
.
 -
коэффициент пульсации р ≈1,57.
-
коэффициент пульсации р ≈1,57.
Предельный
электрический режим выпрямительного
диода характеризует следующие величины:
Максимальное обратное напряжение
Uобр.max;
максимальный
прямой ток Inp.max,
соответствующий Iвыпр.max;
максимальная частота диодов
 ,
так как в случае превышения этой частоты
диоды теряют свои вентильные свойства.
,
так как в случае превышения этой частоты
диоды теряют свои вентильные свойства.
Однофазные и трёхфазные выпрямители
Для выпрямления однофазного тока широко применяют однополупериодные выпрямители и два вида двухполупериодных выпрямителя.
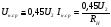
Тр. – трансформатор; ВГ – вентильная группа; СФ - сглаживающий фильтр;
Ст. – стабилизатор
Рисунок 1.9 - Структурная схема однофазного выпрямительного устройства
Для надёжной работы диодов в выпрямителях необходимы два условия:

Если
амплитудное значение выпрямленного
напряжения превышает Uобр.max,
то можно включить последовательно два
и больше однотипных диодов. Обратное
напряжение при этом будет распределяться
обратно пропорционально сопротивлению
диодов. Параллельно этим диодам включаются
шунтирующие резисторы сопротивлением
 для выравнивания обратных напряжений.
для выравнивания обратных напряжений.
Выпускаются
полупроводниковые столбы. Это группа
последовательно соединенных диодов,
которые помещены в один корпус. Такие
столбы выдерживают
 .
.
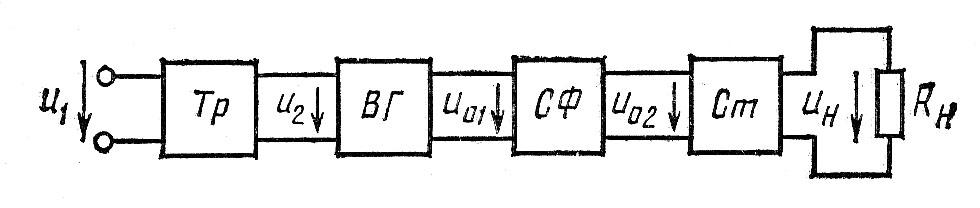
Двухполупериодные выпрямители бывают двух типов: мостовые и с выводом средней точки вторичной обмотки трансформатора. Наибольшее распространение получила мостовая схема.
Рисунок 1.10 - Схема (а) и динамические диаграммы напряжений и токов (б)
мостового выпрямителя

Коэффициент
пульсаций р≈0,67. Максимальное обратное
напряжение на каждом из закрытых диодов,
как и у однополупериодного выпрямителя

Промышленностью выпускаются полупроводниковые выпрямительные блоки, в которых диоды соединены по мостовой схеме.
Двухполупериодный выпрямитель с выводом средней точки вторичной обмотки трансформатора можно рассматривать как сочетание двух однополупериодных выпрямителей, включённых на один и тот же нагрузочный резистор RН. В каждый из полупериодов напряжение Uab работает либо верхняя, либо нижняя часть выпрямителя.
При этом ток в резисторе Rн имеет то же направление, что и в предыдущий полупериод.
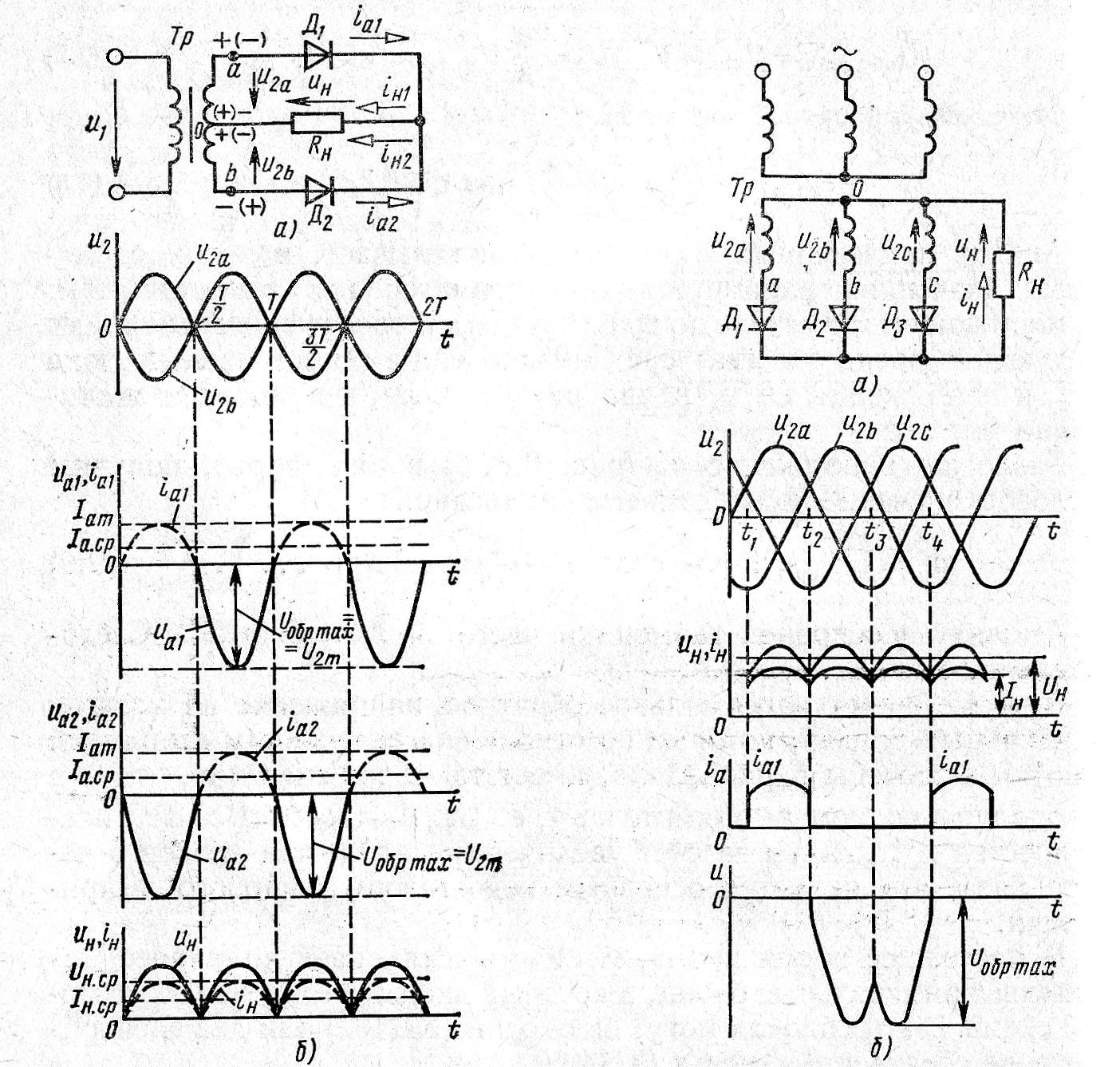
Рисунок 1.11 - Схема (а) и динамические Рисунок 1.12 - Схема (а) и динамические
диаграммы напряжений и токов (б) диаграммы напряжений и токов (б)
выпрямителя с выводом средней трёхфазного выпрямителя с нейтральным
точки вторичной обмотки выводом
трансформатора
Характеристики выпрямителя с выводом средней точки те же, что и у мостового выпрямителя, за исключением напряжения Uобр.max .
При
 коэффициент
пульсаций р ≈0,67.
коэффициент
пульсаций р ≈0,67.
Трёхфазные выпрямители применяют как выпрямители средней и большой мощностей. Существуют два основных типа выпрямителей: с нейтральным выводом и мостовой.
Здесь диоды работают поочередно, каждый в течение трети периода, когда потенциал начала одной из фазных обмоток более положительный, чем двух других.

Коэффициент пульсации р ≈ 0,25.
Трёхфазный выпрямитель с нейтральным выводом служит для питания нагрузочных устройств, в которых Iн.ср ≈ сотни А, а Uн.ср ≈ десятки кВ.
Трёхфазный мостовой выпрямитель (предложен в 1923 году А.Н.Ларионовым) по всем показателям превосходит рассмотренный трехфазный выпрямитель.
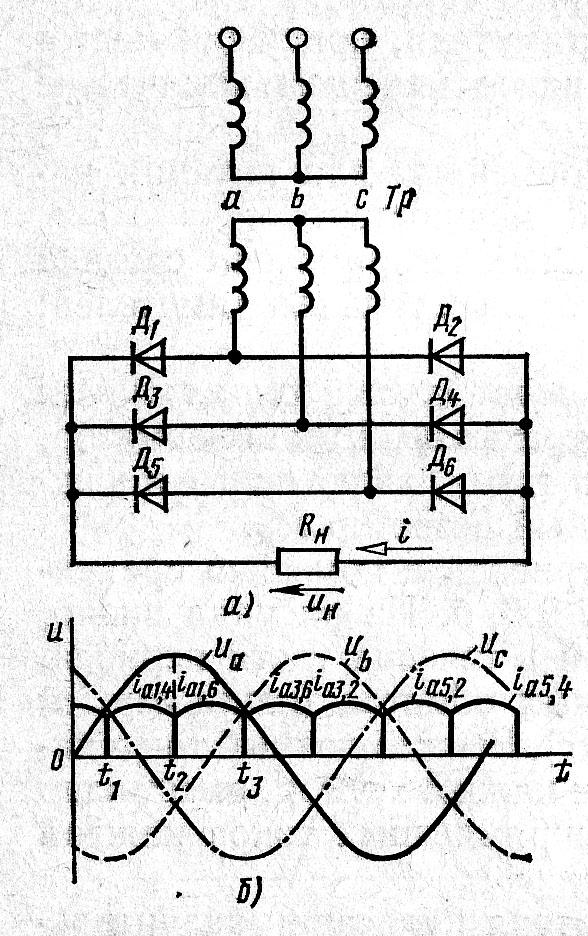
Рисунок 1.13 - Схема (а) и динамические диаграммы (б) напряжений и токов
трёхфазного мостового выпрямителя
Диоды
VD1,
VD3,
VD5
образуют
положительный полюс на нагрузочном
резисторе RН,
а общая точка диодов VD2,
VD4,
VD6
–
отрицательный полюс на нем. Коэффициент
пульсации р = 0,057;

Следовательно, диоды в данном выпрямителе можно выбирать по обратному напряжению близкому к Uн.ср. КПД выпрямителя А.Н. Ларионова больше, чем КПД выпрямителя с нейтральным выводом, так как в мостовом выпрямителе нет подмагничивания сердечника трансформатора постоянным током.
Контрольные вопросы:
1.С какой целью проводят опыты холостого хода и короткого замыкания для трансформатора?
2.Чем отличаются номинальный и эксплуатационный коэффициенты трансформации?
3.Каковы условия параллельного включения трансформаторов на нагрузку?
4.Какие Вам известны группы включения трансформаторов?
5.Начертите структурную схему выпрямителя.
6.Почему предпочтение в практике отдаётся мостовым выпрямителям?
7.Начертите принципиальную электрическую схему известных Вам измерительных трансформаторов.
Лабораторная работа № 2
«Изучение конструкции аналоговых электромеханических приборов для измерения электрических величин и составление их принципиальной электрической схемы»
Цель работы: Изучение принципа действия аналоговых электромеханических приборов магнитоэлектрической, электромагнитной, индукционной и электродинамической систем.
Задание на лабораторную работу:
1.Путём разборки приборов практически изучить конструктивные особенности аналоговых электромеханических приборов различных систем.
2.Начертить принципиальные электрические схемы приборов.
3. Оформить протокол лабораторной работы и защитить его.
2 Аналоговые приборы для электрических измерений
Работа электроустановок невозможна без систематического контроля. Для этого применяют различные электроизмерительные приборы, которые измеряют ток, напряжение, расход энергии, электрическое сопротивление и другие электрические величины. Электроизмерительные приборы применяют для измерения не электрических величин: давления, температуры, расхода вещества, деформации твердых тел и других.
2.1 Общие сведения об электроизмерительных приборах
В практике электрических измерений применяют много разнообразных аналоговых приборов, которые классифицируют по различным признакам:
1. По способу отсчета измеряемой величины (непосредственной оценки, сравнения).
2. По роду измеряемой величины (амперметр, вольтметр, ваттметр; счётчики киловатт- часов; фазометр, частотомер, омметр, генриметр; фарадомер).
3. По роду тока (постоянного тока, переменного тока; постоянного и переменного токов).
4. По принципу действия.
Таблица 2.1 - Классификация аналоговых электроизмерительных приборов
|
Система приборов |
Условное изображение |
|
|
основной прибор |
логометр |
|
|
1 |
2 |
3 |
|
Магнитоэлектрическая
- с подвижной рамкой;
- с подвижным магнитом.
|
|
|
|
Электромагнитная:
- неполяризованная;
- поляризованная.
|
|
|
|
Электродинамическая:
-электродинамическая;
-ферродинамическая. |
|
|
|
Индукционная
Магнитоиндукционная
|
|
|
|
Тепловая:
- с нагреваемой проволокой;
- биметаллическая.
|
|
|
|
Электростатическая |
|
|
|
Вибрационная |
|
|
























На шкалах электроизмерительных приборов применяют условные буквенные обозначения, которые позволяют различать их по роду измеряемой величины:
Эти обозначения помещают на шкалах приборов вместе с другими техническими данными, характеризующими прибор, а именно: класс точности, род тока, испытательное напряжение изоляции, рабочее положение прибора (горизонтальное, вертикальное, под углом, товарный знак предприятия-изготовителя, порядковый номер).
В стационарных режимах для определения соответствующих значений измеряемой электрической величины применяют электромеханические приборы следующих систем:
а) действующее значение измеряют приборы электродинамической, электромагнитной, электростатической и термоэлектрической систем;
б) среднее значение за половину периода измеряют приборы выпрямительной системы

в)
амплитудное
(максимальное) значение за период
измеряют амплитудные электронные
вольтметры

г) приборы магнитоэлектрической системы измеряют постоянную составляющую электрической величины.
Обычно шкалы всех приборов градуируют в действующих значениях:
-для
приборов выпрямительной системы

-для
амплитудных электронных вольтметров

2.2 Краткая информация о погрешности измерительного прибора
Погрешностью измерительного прибора является разность между показанием прибора и истинным значением измеряемой величины. В зависимости от единицы измерения различают абсолютные, относительные и приведённые погрешности.
Абсолютная
погрешность
средства измерения выражается в единицах
измеряемой величины и равна разности
между показанием прибора
 и истинным значением измеряемой величины,
за которое принимается её действительное
значение
и истинным значением измеряемой величины,
за которое принимается её действительное
значение


Относительная погрешность есть отношение абсолютной погрешности к её действительному значению.
Приведённая погрешность – отношение абсолютной погрешности средства измерения к нормирующему значению. Чаще всего нормирующее значение выбирают равным значению диапазона измерений.
В технике применяют приборы для измерения лишь с определённой заранее заданной погрешностью – основной погрешностью, допускаемой нормами. Если прибор эксплуатируют в условиях, отличающихся от нормальных (нормальная температура воздуха 20 0С, нормальное атмосферное давление 101,325 кПа), то возникает дополнительная погрешность, которая увеличивает общую погрешность прибора.
Обобщённой
характеристикой средств измерения
является класс
точности,
который определяется предельными
значениями допускаемых основной и
дополнительной погрешностей, а также
другими условиями. Измерительным
приборам, пределы допускаемой основной
погрешности которых заданы в виде
приведённых (относительных) погрешностей,
присваивают классы точности, выбираемые
из следующего ряда чисел: (1,0;
1,5; 2,0; 2,5; 3,0; 4,0) 10
n,
- где n
= 1; 0; -1; -2 и т.д. Класс точности измерительного
прибора численно равен наибольшему
значению относительной приведённой
погрешности
10
n,
- где n
= 1; 0; -1; -2 и т.д. Класс точности измерительного
прибора численно равен наибольшему
значению относительной приведённой
погрешности
 выраженному в процентах
выраженному в процентах

Класс точности обычно указывают на шкале прибора. В соответствии с ГОСТ 12997-84 все приборы разделяют группы:
-
изделия ГСП 1 порядка (образцовые) с классом точности 0,1 – 0,2;
-
изделия ГСП 2 порядка (лабораторные) с классом точности 0,5;
-
изделия ГСП 3 порядка (промышленные) с классом точности 1,0 – 2,5.
Если
рассматривать погрешность измерения
как случайную величину, распределённую
по нормальному закону, то вероятность
попадания её на интервал
 выражается формулой
выражается формулой

Если
интервал
 симметричен относительно значения
математического ожидания погрешности
симметричен относительно значения
математического ожидания погрешности
 ,
т.е.
,
т.е.
 то
то

При
задании
 вероятность попадания на указанный
интервал равна
вероятность попадания на указанный
интервал равна

Этот результат известен в теории вероятностей, как правило «трёх сигма».
Когда необходимо оценить приведённую погрешность комплекта приборов, то следует применить рекомендации ГОСТ 27.202-83, с. 19 (сб. «Надёжность в технике»).

При
нормальном законе распределения
 К – коэффициент риска с вероятностью
К – коэффициент риска с вероятностью

Таблица 2.2 – Значения коэффициента риска
|
Р, % |
32,00 |
10,00 |
4,50 |
1,00 |
0,27 |
0,10 |
0,01 |
|
К |
1,00 |
1,65 |
2,00 |
2,57 |
3,00 |
3,29 |
3,89 |
Расчёты
показывают, что в качестве верхней
оценки значения
 можно
принять значение корня квадратного из
суммы квадратов всех элементов комплекта
приборов, как это рекомендовали ещё в
начале 50-х годов двадцатого столетия,
во времена становления теории вероятностей.
можно
принять значение корня квадратного из
суммы квадратов всех элементов комплекта
приборов, как это рекомендовали ещё в
начале 50-х годов двадцатого столетия,
во времена становления теории вероятностей.
2.3 Магнитоэлектрический измерительный прибор
Его работа основана на взаимодействии сильного постоянного магнитного поля и проводника с током, выполненного в виде рамки. Если в рамке есть ток I, то на проводник действует электромагнитная сила

Относительно
оси рамки создается вращающий момент ,
N
– число витков рамки, S
=
,
N
– число витков рамки, S
= -
площадь рамки,
-
площадь рамки,
 –
ширина рамки, B
- магнитная индукция. Все эти величины
являются постоянными для данного
прибора. Противодействующий момент
создается пружинами
–
ширина рамки, B
- магнитная индукция. Все эти величины
являются постоянными для данного
прибора. Противодействующий момент
создается пружинами
 ,
либо в случае логометра – другой рамкой
с током,
,
либо в случае логометра – другой рамкой
с током,
 - угол поворота рамки.
- угол поворота рамки.
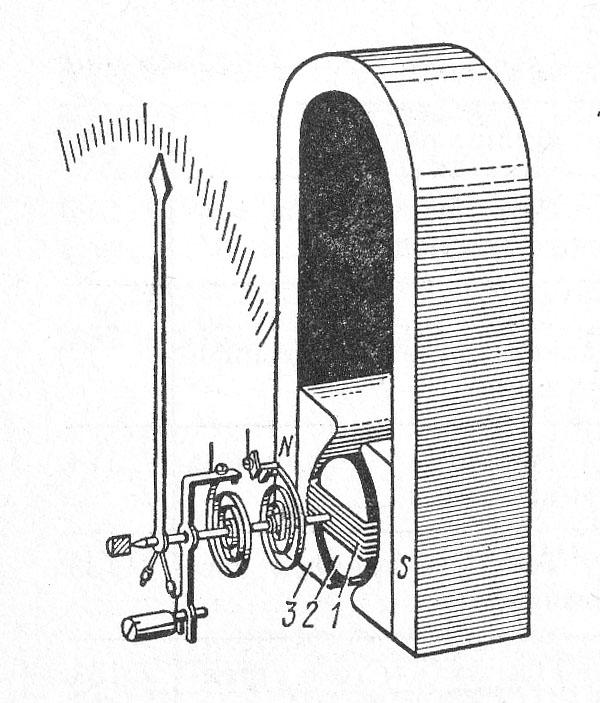
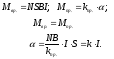
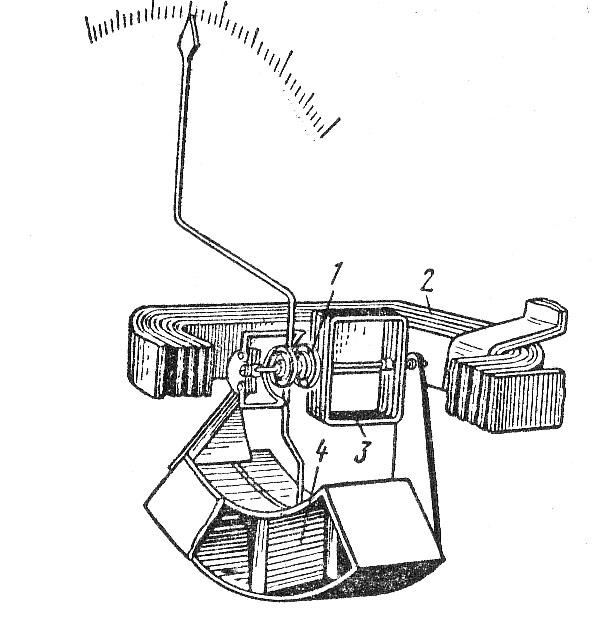
1 – рамка (катушка); 2 – цилиндрический сердечник; 3 – полюсные наконечники
Рисунок 2.1 - Устройство прибора магнитоэлектрической системы
Приборы магнитоэлектрической системы обладают высокой чувствительностью, почти не потребляют энергии, слабо зависят от внешних магнитных полей. Однако эти приборы могут использоваться лишь в цепях постоянного тока, так как направление тока в катушке (рамке) определяет направление вращающего момента.
Для измерения в цепях переменного тока приборами магнитоэлектрической системы используют выпрямители.
Коэффициент k - характеризует чувствительность прибора.
2.4 Электромагнитный измерительный прибор
Работа приборов электромагнитной системы основана на принципе взаимодействия подвижного ферромагнитного сердечника и магнитного поля, в котором сердечник перемещается в такое положение, при котором магнитный поток в электромагнитном устройстве будет наибольшим. Ток в неподвижной катушке создаёт магнитное поле, под действием которого подвижный сердечник в форме лепестка из магнитомягкого ферромагнетика, укрепленного на оси эксцентрично, втягивается в узкую щель внутри катушки. Ось поворачивается и поворачивает укрепленную на ней стрелку. Направление вращающегося момента в приборах электромагнитной системы не зависит от направления тока, так как при любом знаке тока момент положительный, и их используют для измерения в целях постоянного и переменного тока. В целях постоянного тока прибор электромагнитной системы может давать различные показания с отклонением до 2% при одном и том же значении измеряемой величины, что связано с влиянием магнитного гистерезиса. Это же явление оказывает влияние на погрешность приборов при измерении в цепи переменного тока; кроме того, есть значительное влияние внешних магнитных полей, относительно большое собственное энергопотребление, неравномерность шкалы


1 – катушка; 2 – пружина, создающая противодействующий момент; 3 – сердечник
Рисунок 2.2 - Устройство прибора электромагнитной системы
2.5 Измерение тока и напряжения
При использовании прибора магнитоэлектрической системы для измерения больших токов в цепь включают шунт Rш, имеющий постоянное малое сопротивление, параллельно которому присоединена катушка (рамка).
Значение измеряемого тока равно:

Для прибора электромагнитной системы

Электромагнитные амперметры применяют обычно без шунтов (для тока до 200 А), пропуская ток по катушке измерительной части прибора, представляющей собой виток из толстой медной шины. Амперметры включают последовательно в цепь измеряемого тока, их изготавливают с малым собственным сопротивлением (обычно доли Ома).
Для измерения электрического напряжения последовательно с катушкой измерительной части прибора включают добавочный резистор, имеющий большое постоянное сопротивление Rд. Такую измерительную цепь включают параллельно участку цепи, на котором измеряют напряжение:
 .
.
Вольтметры изготавливают с большим собственным сопротивлением (десятки, сотни Ом). Чем больше сопротивление вольтметра, тем меньше он изменяет сопротивление участка цепи, параллельно которому подключен.
В электрических цепях переменного тока для измерения больших токов и напряжений применяют измерительные трансформаторы, которые необходимы для расширения пределов измерения и для обеспечения безопасности.
Кроме
того, в цепях постоянного тока используют
так называемые «измерительные
трансформаторы постоянного тока»,
которые не являются трансформаторами,
как таковыми. Они представляют собой
дроссели (катушки индуктивности),
работающие в режиме магнитного насыщения.
Чувствительный элемент этого прибора
состоит из двух одинаковых ферромагнитных
сердечников 1 и 2, на которых навиты
обмотки 3
 из провода одного сечения и с одинаковым
количеством витков. Обмотки
из провода одного сечения и с одинаковым
количеством витков. Обмотки
 включаются встречно и соединяются с
однофазным двухполупериодным мостовым
выпрямителем. Шина (провод) 5 с измеряемым
током продевается сквозь кольца
сердечников.
включаются встречно и соединяются с
однофазным двухполупериодным мостовым
выпрямителем. Шина (провод) 5 с измеряемым
током продевается сквозь кольца
сердечников.
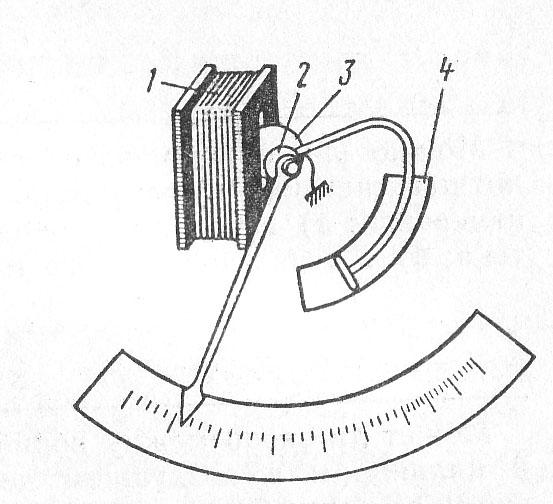
В настоящее время дроссели насыщения применяют для измерения тока и напряжения в цепях переменного тока. Одна из возможных схем измерения представлена ниже на рисунке 2.3.
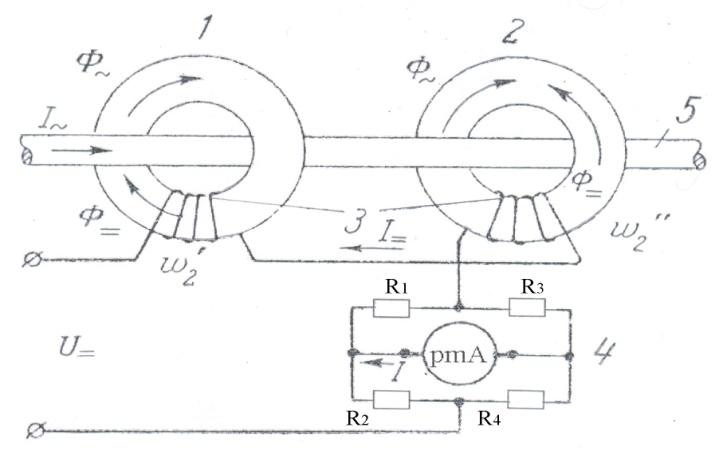
Рисунок 2.3 – Принципиальная электрическая схема для измерения тока
в цепи переменного тока
Протекая
по проводу 5, измеряемый ток
 создаёт в обоих сердечниках одинаково
направленные и одинаковые по значению
магнитные потоки
создаёт в обоих сердечниках одинаково
направленные и одинаковые по значению
магнитные потоки
 По обмоткам
По обмоткам
 протекает постоянный ток. Пусть в данный
момент времени ток в цепи этих обмоток
имеет такое направление, что магнитный
поток
протекает постоянный ток. Пусть в данный
момент времени ток в цепи этих обмоток
имеет такое направление, что магнитный
поток
 в первом сердечнике, созданный
намагничивающей силой
в первом сердечнике, созданный
намагничивающей силой
 ,
совпадает по направлению с магнитным
потоком
,
совпадает по направлению с магнитным
потоком
 Тогда в сердечнике 2 эти потоки будут
направлены встречно, так как обмотки
Тогда в сердечнике 2 эти потоки будут
направлены встречно, так как обмотки
 включены встречно.
включены встречно.
На
рисунке 2.4 приведен график намагничивания
сердечников
 .
На этом графике точкой А
обозначено значение магнитного потока
.
На этом графике точкой А
обозначено значение магнитного потока
 ,
соответствующее намагничивающей силе
,
соответствующее намагничивающей силе
 ,
созданной измеряемым током
,
созданной измеряемым током
 .
Так как используется проходная шина
(провод), то
.
Так как используется проходная шина
(провод), то
 .
.
Рисунок 2.4 – График намагничивания сердечников
В
сердечнике 1 намагничивающие силы
измеряемого тока
 и постоянного тока
и постоянного тока
 совпадают, но практического увеличения
магнитного потока в сердечнике не
происходит, потому что сердечник насыщен
постоянным магнитным потоком
совпадают, но практического увеличения
магнитного потока в сердечнике не
происходит, потому что сердечник насыщен
постоянным магнитным потоком
 .
При этом сопротивление обмотки
.
При этом сопротивление обмотки
 будет определяться только активным
сопротивлением дросселя. В то же время
значение тока в обмотке сердечника 2
будет равно
будет определяться только активным
сопротивлением дросселя. В то же время
значение тока в обмотке сердечника 2
будет равно
 .
.
Очевидно,
что пока сердечник 2 будет в состоянии
насыщения
 .
Сопротивление
.
Сопротивление
 мало и ток
мало и ток
 ,
будет быстро увеличиваться. Но
намагничивающая сила
,
будет быстро увеличиваться. Но
намагничивающая сила
 направлена навстречу намагничивающей
силе
направлена навстречу намагничивающей
силе
 и значение магнитного потока в сердечнике
2 определяется их разностью. Значение
тока
и значение магнитного потока в сердечнике
2 определяется их разностью. Значение
тока
 будет быстро расти до тех пор, пока
функция
будет быстро расти до тех пор, пока
функция
 не придёт в точку В.
С этого момента
не придёт в точку В.
С этого момента
 ,
а нарастание тока
,
а нарастание тока
 замедляется. Затем
замедляется. Затем
 компенсирует напряжение
компенсирует напряжение
 и нарастание тока прекращается. При
этом
и нарастание тока прекращается. При
этом
 или
или
 .
.
Так
как сердечник 1 находится в состоянии
магнитного насыщения, то его обмотка
 на значение тока
на значение тока
 практического влияния не окажет. В
течение следующего полупериода, когда
переменный ток и наведенные им магнитные
потоки изменят своё направление,
сердечники 1 и 2 поменяются ролями.
практического влияния не окажет. В
течение следующего полупериода, когда
переменный ток и наведенные им магнитные
потоки изменят своё направление,
сердечники 1 и 2 поменяются ролями.
Изменение
тока питания моста приводит к изменению
тока в измерительной диагонали этого
моста, характеризующего изменение
значения переменного тока в шине
(проводе) 5. Аналогичным образом дроссели
насыщения применяют для измерения
напряжения переменного тока. Только
вместо шины у них используют многовитковые
обмотки
 ,
которые включаются в цепь измерения
напряжения через добавочное сопротивление.
Так как обмотки
,
которые включаются в цепь измерения
напряжения через добавочное сопротивление.
Так как обмотки
 содержат большое количество витков, то
при последовательном соединении обмоток
содержат большое количество витков, то
при последовательном соединении обмоток
 в обмотках
в обмотках
 будет наводиться ЭДС двойной частоты.
Для исключения этого явления вторичные
обмотки соединены параллельно.
будет наводиться ЭДС двойной частоты.
Для исключения этого явления вторичные
обмотки соединены параллельно.
2.6 Измерение мощности и энергии
Для измерения мощности и энергии в электрических цепях используют приборы электродинамической и индукционной систем. В практике обычно применяют электродинамические ваттметры и индукционные счетчики электрической энергии.
В
электродинамических приборах принцип
взаимодействия проводов с токами
конструктивно реализован в форме
взаимодействия двух катушек: неподвижной
с током
 и подвижной с током
и подвижной с током
 .
Как и в приборе магнитоэлектрической
системы, подвижная катушка получает
питание через две спиральные пружины,
которые создают противодействующий
момент Мпр.
=
.
Как и в приборе магнитоэлектрической
системы, подвижная катушка получает
питание через две спиральные пружины,
которые создают противодействующий
момент Мпр.
=
 ;
;

1 – пружины; 2 – неподвижная катушка; 3 – подвижная катушка; 4 – воздушный демпфер
Рисунок 2.5 - Устройство прибора электродинамической системы
Электродинамический прибор пригоден для измерения в цепях постоянного и переменного токов, так как при одновременном изменении направления тока в обеих катушках направление вращающего момента сохраняется.
Собственное магнитное поле этих приборов слабое, и поэтому приборы электродинамической системы подвержены влиянию внешних магнитных полей, для защиты от которых применяют экраны из ферромагнитных материалов. Кроме того, эти приборы потребляют большое количество энергии, чувствительны к электрическим и механическим перегрузкам, сложны в изготовлении и отличаются высокой стоимостью.
Чтобы устранить влияние внешних магнитных полей внутри катушек помещают ферромагнитные сердечники. Такой прибор называют ферродинамическим. Конструктивно он похож на прибор магнитоэлектрической системы, но вместо постоянного магнита в нём есть электромагнит – неподвижная катушка с ферромагнитным сердечником, где создается сильное магнитное поле. Но сердечник электромагнита вносит дополнительные погрешности в процесс измерения.
2.6.1 Измерение мощности
Для измерения мощности неподвижную катушку включают последовательно с элементом в цепи, мощность которого следует измерить (как амперметр); а подвижную катушку включают параллельно этому же элементу (как вольтметр). При этом два зажима ваттметра, отмеченные звездочкой (по одному от каждой обмотки – это начало обмоток), включают в цепь со стороны источника питания (сети):
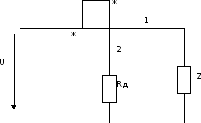
Рисунок 2.6 – Принципиальная схема ваттметра
Ток
в неподвижной катушке равен току в
рабочей цепи
 ,
а ток в подвижной катушке пропорционален
напряжению
,
а ток в подвижной катушке пропорционален
напряжению
 ,
где
,
где
 д
;
д
;
 - сопротивление катушки прибора.
- сопротивление катушки прибора.
 т.е.
т.е.
вращающий момент электродинамического прибора пропорционален мощности цепи при постоянном токе.
При включении электродинамического прибора в цепь переменного тока вращающий момент пропорционален активной мощности:

В
трёхфазной цепи при равномерной нагрузке
мощность измеряется одним ваттметром
в одной фазе
 .
В четырёх проводной цепи в каждую фазу
включают по ваттметру:
.
В четырёх проводной цепи в каждую фазу
включают по ваттметру:
 .
.
В трёх проводной трёхфазной цепи при неравномерной нагрузке применяют схему с двумя одноэлементными ваттметрами. Можно показать, что мгновенная мощность в этом случае определяется соотношением:

Мгновенная мощность трёхфазной цепи переменного тока равна
 .
.
При соединении «звездой» без нулевого провода сумма линейных токов равна нулю:
 .
.
Подставив
выражение для тока
 в формулу мощности трёхфазной цепи,
получим
в формулу мощности трёхфазной цепи,
получим
 .
.
При соединении «треугольником» сумма фазных (линейных) напряжений равна нулю:
 .
.
Подставив
выражение для напряжения
 в формулу для мгновенной мощности,
получим
в формулу для мгновенной мощности,
получим
 .
.
Принципиальная схема измерения мощности двухэлементным ваттметром показана ниже.
Схемы измерения мощности в трехфазных цепях
при симметричной нагрузке.
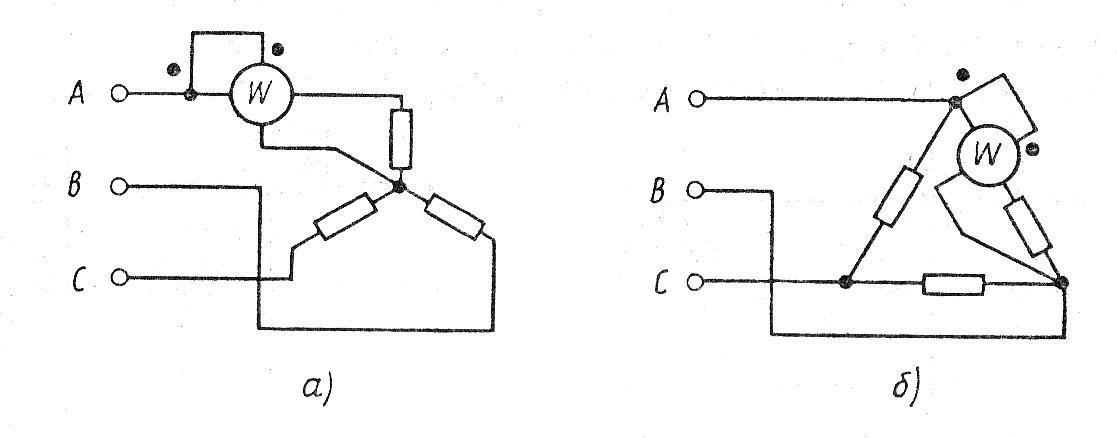
Рисунок 2.7 – Схемы измерения мощности в трёхфазных цепях
при симметричной нагрузке
Если нулевая точка соединения «звездой» или ветви «треугольника» недоступны для непосредственного подключения приборов, то образуют искусственную нулевую точку:
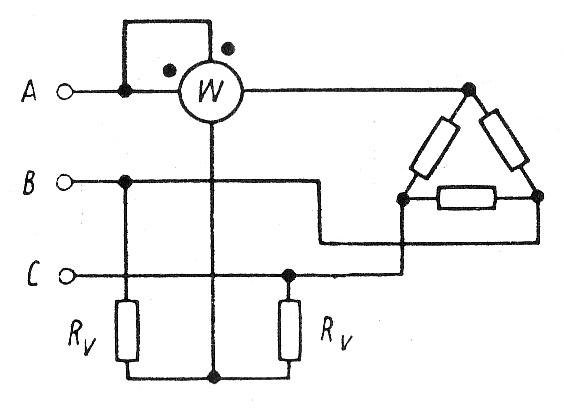
Рисунок 2.8 – Схема измерения мощности при образовании искусственной
нулевой точки
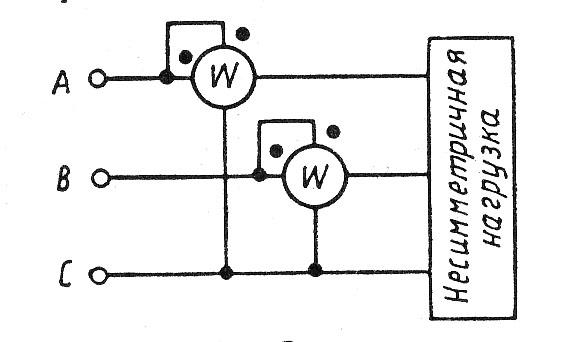
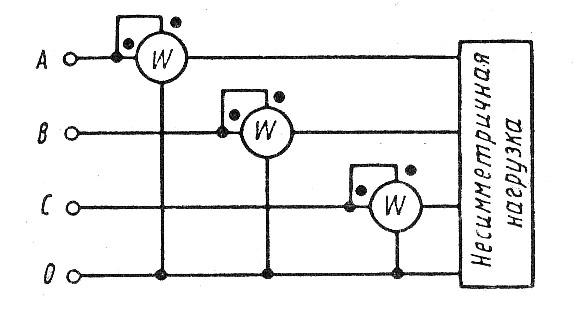
Рисунок 2.9 – Схемы измерения мощности при несимметричной нагрузке
2.6.2 Индукционный измерительный прибор
В основе работы индукционного измерительного прибора лежит действие переменного магнитного поля на индуктированные им токи. В конструктивную схему входят: два электромагнита, алюминиевый диск и постоянный магнит. Обмотка первого электромагнита включается в цепь так же как вольтметр; обмотка второго электромагнита, имеющая малое число витков, включается как амперметр. Вращающий момент создается в результате действия переменного магнитного потока первого электромагнита на ток, индуктированный магнитным полем второго электромагнита, и наоборот.
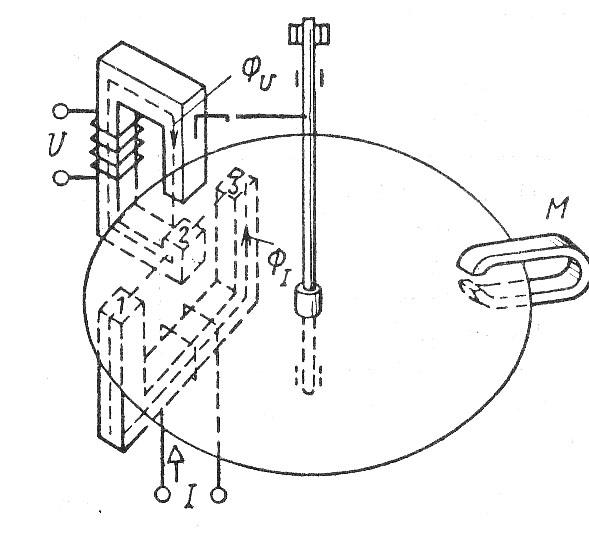
Рисунок 2.10 - Устройство индукционного измерительного прибора
Край алюминиевого диска проходит в зазоре между полюсами постоянного магнита. При вращении диска постоянное магнитное поле индуктирует в нём ток, создавая тормозящий момент.
При равенстве вращающего и тормозящего моментов диск вращается с постоянной скоростью:
 ,
,
отсюда
можно записать
 ;
если умножить обе части уравнения на
время, то получим
;
если умножить обе части уравнения на
время, то получим
 ,
,
где
обозначено: t
– время;
 - постоянная прибора; n
– частота вращения диска:
- постоянная прибора; n
– частота вращения диска:
 -
энергия в цепи за время t:
-
энергия в цепи за время t:
 - число оборотов диска за то же время.
- число оборотов диска за то же время.
Таким образом, W=C·N, и, оказывается, что необходимо считать количество оборотов диска для измерения энергии. Индукционный измерительный прибор, снабженный счётным механизмом, называют счётчиком электрической энергии.
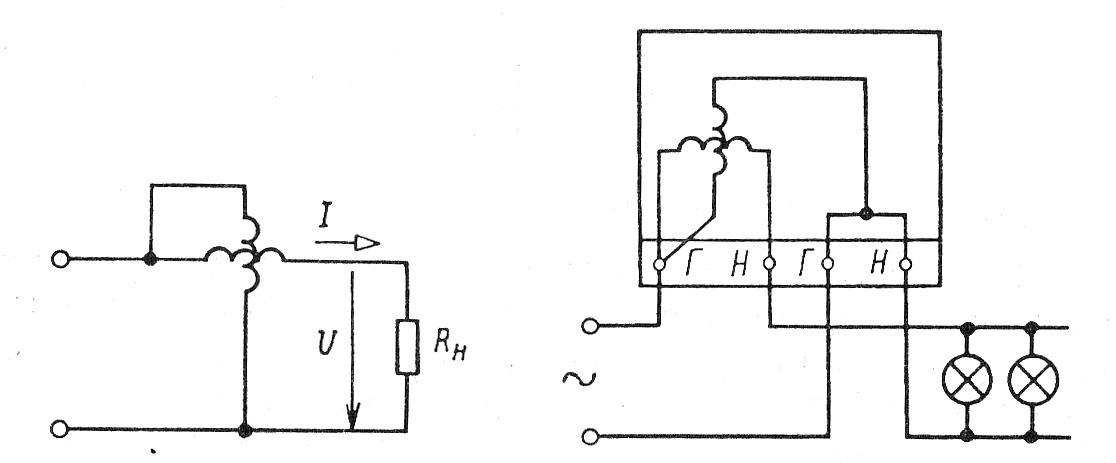
а) б)
Рисунок 2.11 - Принципиальная электрическая схема (а) и схема включения (б)
однофазного индукционного счётчика электрической энергии
Для измерения энергии в трёхфазных электрических цепях применяют трёхфазные двухэлементные счётчики.
2.7 Измерение сопротивления
Методы измерения малых значений сопротивления существенно отличаются от методов измерения больших сопротивлений, так как в первом случае надо принимать меры для исключения влияния на результат измерения сопротивления соединительных проводов, переходных контактов. Для прямого измерения сопротивлений применяют магнитоэлектрические измерительные приборы с одной и двумя обмотками (рамками). Обычно в прибор с одной рамкой вводят добавочный резистор с постоянным сопротивлением Rд и снабжают его источником питания, например, батареей сухих элементов. Измеряемое сопротивление Rх включают последовательно или параллельно. При последовательном соединении
 ,
,
угол
отклонения стрелки прибора при U=const
зависит от сопротивления
 :
:

Ошибка от непостоянства напряжения питающего источника не возникает, если используется измерительный прибор с двумя рабочими обмотками (рамками), который называют логометром. В нём нет противодействующих пружин, вращающий и противодействующий моменты создаются электромагнитными силами.
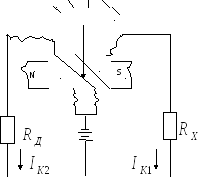
Рисунок 2.12 – Принципиальная схема логометра
 или
или
 ,
т.е.
,
т.е.
 ,
,
и не зависит от напряжения питающего источника. Используя указанную функциональную зависимость, шкалу прибора градуируют в единицах сопротивления и прибор называют «омметром».
Омметры для измерения сопротивления изоляции снабжают источником питания с напряжением до 1000 В, чтобы измерение проводить при напряжении примерно равном рабочему напряжению установки.
2.7.1 Косвенные методы измерения сопротивления
Сопротивление
резистора или иного элемента электрической
сети можно определить по показаниям
вольтметра и амперметра, применяя закон
Ома:
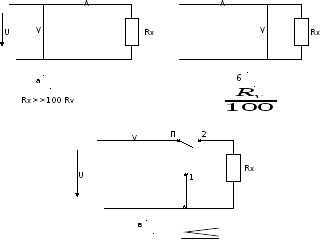
Рисунок 2.13 – Принципиальные схемы измерения сопротивления
На рисунке 2.13в при положении переключателя П в положение 1 вольтметр измеряет напряжение сети U, а в положении 2 – напряжение на зажимах вольтметра Uв:

Последний метод применяют для измерения малых сопротивлений.
Средние и большие сопротивления можно измерить методом замещения, используя мостовую схему измерения.
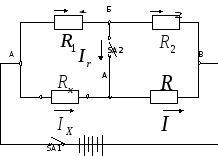
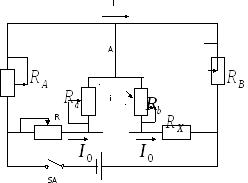
Рисунок 2.14 – Мостовая схема измерения электрического сопротивления
Предположим,
что при некотором сопротивлении Rx
другие сопротивления подобраны так,
что ток в измерительной диагонали
 =0,
т.е.
=0,
т.е.
 при замкнутых выключателях
при замкнутых выключателях
 и
и
 ;
тогда
;
тогда

В
приборе промышленного изготовления R
– набор резисторов (магазин сопротивлений)
составлен по декадному принципу. На
верхней крышке расположены переключатели,
с помощью которых можно набрать в
известных пределах любое значение
сопротивления с точностью, которая
определяется самой малой ступенью
изменения сопротивления. Для расширения
пределов измерения значение резисторов
 и
и
 подбирают так, чтобы их отношение можно
было изменить тоже по десятичной системе,
например,
подбирают так, чтобы их отношение можно
было изменить тоже по десятичной системе,
например,

2.7.2 Определение малых сопротивлений при помощи двойного моста В. Томсона
GB
Рисунок 2.15 – Двойной мост В. Томсона
Сопротивления
 ,
,
 ,
,
 ,
,
 велики по сравнению с R
и
велики по сравнению с R
и
 .
Благодаря этому практически исключается
влияние сопротивления соединительных
проводов и зажимов.
.
Благодаря этому практически исключается
влияние сопротивления соединительных
проводов и зажимов.
Изменением
сопротивлений
 ,
,
 ,
,
 ,
,
 и R
можно добиться того, чтобы ток в
сопротивлениях
и R
можно добиться того, чтобы ток в
сопротивлениях
 и
и
 ,
,
 и
и ,
R
и
,
R
и
 будут,
очевидно, попарно равны; они обозначены
I,
i
и
будут,
очевидно, попарно равны; они обозначены
I,
i
и
 .
.
В соответствии с законом Кирхгофа имеем:

Отсюда,

Если
подобрать сопротивления
 ,
,
 ,
,
 и
и
 так, чтобы
так, чтобы
 ,
то тогда
,
то тогда
 .
.
При измерении, как и в случае обычной мостовой схемы, цепь следует замыкать лишь на короткое время.
Контрольные вопросы:
1.В каких системах приборы измеряют действующее значение параметров электрического тока?
2.К какой группе ГСП относятся промышленные приборы?
3.Объясните нелинейность шкалы приборов электромагнитной системы.
4.Укажите, каким образом расширить диапазон измерения приборов магнитоэлектрической и электромагнитной систем?
5.В чём основной недостаток цифровых приборов измерения параметров электрических величин?
6. Перечислите основные методы измерения электрического сопротивления.
Лабораторная работа № 3
«Измерение параметров электрического тока (силы тока, напряжения, электрического сопротивления, частоты переменного тока); измерение технических величин электротехническими методами»
Цель работы: Изучение принципа действия аналоговых электрических приборов для измерения силы тока, напряжения; приборов для измерения технических величин (давления, температуры) электротехническими методами; приобретение навыков работы с мультиметром при измерении силы тока, напряжения, частоты электрического тока, значения ёмкости конденсатора.
Задание на лабораторную работу:
1.Выполнить измерение силы тока, напряжения, частоты электрического тока, значения ёмкости конденсатора посредством мультиметра.
2.Начертить принципиальные электрические схемы включения приборов для измерения технических величин.
3.Оформить протокол лабораторной работы и защитить его.
Измерение электрических и технических величин
В современной промышленной автоматике отчётливо выражены два подхода к измерению электрических и технических величин, а именно:
•для измерения постоянного и переменного тока применяют схемы с так называемыми дросселями насыщения;
•при измерении технических величин используют специализированные аналоговые микросхемы.
3.1 Датчики электрического тока
В электрических цепях переменного тока для измерения больших токов и напряжений применяют измерительные трансформаторы, которые необходимы для расширения пределов измерения и для обеспечения безопасности.
Кроме
того, в цепях постоянного тока используют
так называемые «измерительные
трансформаторы постоянного тока»,
которые не являются трансформаторами,
как таковыми. Они представляют собой
дроссели (катушки индуктивности),
работающие в режиме магнитного насыщения.
Чувствительный элемент этого прибора
состоит из двух одинаковых ферромагнитных
сердечников 1 и 2, на которых навиты
обмотки 3
 из провода одного сечения и с одинаковым
количеством витков. Обмотки
из провода одного сечения и с одинаковым
количеством витков. Обмотки
 включаются встречно и соединяются с
однофазным двухполупериодным мостовым
выпрямителем. Шина (провод) 5 с измеряемым
током продевается сквозь кольца
сердечников.
включаются встречно и соединяются с
однофазным двухполупериодным мостовым
выпрямителем. Шина (провод) 5 с измеряемым
током продевается сквозь кольца
сердечников.
В настоящее время дроссели насыщения применяют для измерения тока и напряжения в цепях переменного тока. Одна из возможных схем измерения представлена ниже на рисунке 3.1.
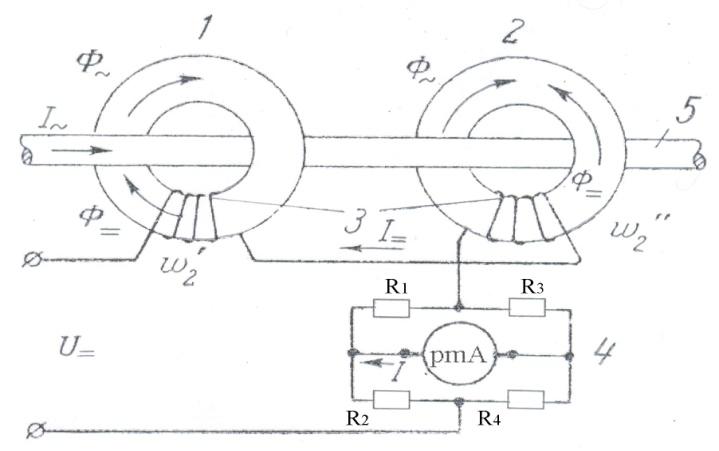
Рисунок 3.1 – Принципиальная электрическая схема для измерения тока
в цепи переменного тока
Протекая
по проводу 5, измеряемый ток
 создаёт в обоих сердечниках одинаково
направленные и одинаковые по значению
магнитные потоки
создаёт в обоих сердечниках одинаково
направленные и одинаковые по значению
магнитные потоки
 По обмоткам
По обмоткам
 протекает постоянный ток. Пусть в данный
момент времени ток в цепи этих обмоток
имеет такое направление, что магнитный
поток
протекает постоянный ток. Пусть в данный
момент времени ток в цепи этих обмоток
имеет такое направление, что магнитный
поток
 в первом сердечнике, созданный
намагничивающей силой
в первом сердечнике, созданный
намагничивающей силой
 ,
совпадает по направлению с магнитным
потоком
,
совпадает по направлению с магнитным
потоком
 Тогда в сердечнике 2 эти потоки будут
направлены встречно, так как обмотки
Тогда в сердечнике 2 эти потоки будут
направлены встречно, так как обмотки
 включены встречно.
включены встречно.
На
рисунке 8.4 приведен график намагничивания
сердечников
 .
На этом графике точкой А
обозначено значение магнитного потока
.
На этом графике точкой А
обозначено значение магнитного потока
 ,
соответствующее намагничивающей силе
,
соответствующее намагничивающей силе
 ,
созданной измеряемым током
,
созданной измеряемым током
 .
Так как используется проходная шина
(провод), то
.
Так как используется проходная шина
(провод), то
 .
.
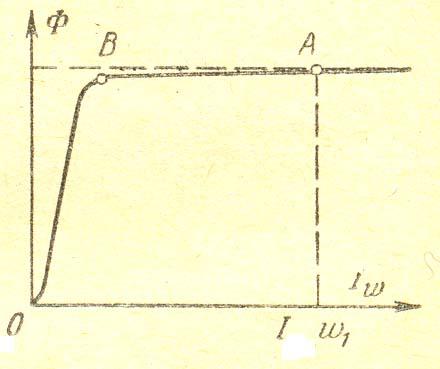
Рисунок 3.2 – График намагничивания сердечников
В
сердечнике 1 намагничивающие силы
измеряемого тока
 и постоянного тока
и постоянного тока
 совпадают, но практического увеличения
магнитного потока в сердечнике не
происходит, потому что сердечник насыщен
постоянным магнитным потоком
совпадают, но практического увеличения
магнитного потока в сердечнике не
происходит, потому что сердечник насыщен
постоянным магнитным потоком
 .
При этом сопротивление обмотки
.
При этом сопротивление обмотки
 будет определяться только активным
сопротивлением дросселя. В то же время
значение тока в обмотке сердечника 2
будет равно
будет определяться только активным
сопротивлением дросселя. В то же время
значение тока в обмотке сердечника 2
будет равно
 .
.
Очевидно,
что пока сердечник 2 будет в состоянии
насыщения
 .
Сопротивление
.
Сопротивление
 мало и ток
мало и ток
 ,
будет быстро увеличиваться. Но
намагничивающая сила
,
будет быстро увеличиваться. Но
намагничивающая сила
 направлена навстречу намагничивающей
силе
направлена навстречу намагничивающей
силе
 и значение магнитного потока в сердечнике
2 определяется их разностью. Значение
тока
и значение магнитного потока в сердечнике
2 определяется их разностью. Значение
тока
 будет быстро расти до тех пор, пока
функция
будет быстро расти до тех пор, пока
функция
 не придёт в точку В.
С этого момента
не придёт в точку В.
С этого момента
 ,
а нарастание тока
,
а нарастание тока
 замедляется. Затем
замедляется. Затем
 компенсирует напряжение
компенсирует напряжение
 и нарастание тока прекращается. При
этом
и нарастание тока прекращается. При
этом
 или
или
 .
.
Так
как сердечник 1 находится в состоянии
магнитного насыщения, то его обмотка
 на значение тока
на значение тока
 практического влияния не окажет. В
течение следующего полупериода, когда
переменный ток и наведенные им магнитные
потоки изменят своё направление,
сердечники 1 и 2 поменяются ролями.
практического влияния не окажет. В
течение следующего полупериода, когда
переменный ток и наведенные им магнитные
потоки изменят своё направление,
сердечники 1 и 2 поменяются ролями.
Изменение тока питания моста приводит к изменению тока в измерительной диагонали этого моста, характеризующего изменение значения переменного тока в шине (проводе) 5.
Аналогичным
образом дроссели насыщения применяют
для измерения напряжения переменного
тока. Только вместо шины у них используют
многовитковые обмотки
 ,
которые включаются в цепь измерения
напряжения через добавочное сопротивление.
Так как обмотки
,
которые включаются в цепь измерения
напряжения через добавочное сопротивление.
Так как обмотки
 содержат большое количество витков, то
при последовательном соединении обмоток
содержат большое количество витков, то
при последовательном соединении обмоток
 в обмотках
в обмотках
 будет наводиться ЭДС двойной частоты.
Для исключения этого явления вторичные
обмотки соединены параллельно.
будет наводиться ЭДС двойной частоты.
Для исключения этого явления вторичные
обмотки соединены параллельно.
-
Датчики технических величин
3.2.1 Специальные микросхемы для датчиков температуры,
силы и давления
Несмотря на широкое применение цифровых интерфейсов CAN, RS-485, Ethernet, USB, интерфейс токовой петли (4÷20) мА часто используется в промышленной автоматике. Связано это, в первую очередь, с тем, что аналоговая схемотехника позволяет с высокой точностью выполнять операцию интегрирования. Приведённая погрешность преобразования при построении измерительных преобразователей с отрицательной обратной связью составляет менее 0,1 %, что недоступно для цифровых микросхем. Во вторых, полупроводниковые датчики температуры всё ещё серьёзно уступают по классу точности термопарам и металлическим термометрам электрического сопротивления.
Задача согласования выходного аналогового сигнала датчика технической величины с интерфейсом его передачи предполагает:
•формирование напряжения питания или питающего тока для смещения источника сигнала (формирование нулевого потенциала чувствительного элемента датчика);
•первичную обработку сигнала чувствительного элемента датчика (фильтрация, линеаризация);
•согласование с интерфейсом передачи (нормирование).
Компания «Texas Instruments» (TI) производит аналоговые микросхемы, являющиеся специализированными формирователями сигнала. Например, микросхема XTR 105 (подключение термометра с электрическим сопротивлением 100 Ом с линеаризацией); микросхема XTR 106 (подключение мостового датчика с линеаризацией); микросхема XTR 108 (подключение активной нагрузки с сопротивлением 10 Ом ÷10 кОм, 6-канальный мультиплексор, ОУ, интерфейс калибровочного EEPROM); микросхема RCV 420 (вход 4…20 мА, выход 0…5 В, перепад напряжения 1,5 В). Рассмотрим применение этих формирователей аналогового сигнала при построении датчиков температуры, давления, силы.
Принципиальная электрическая схема микросхемы XTR 106 приведена на рисунке 3.3.
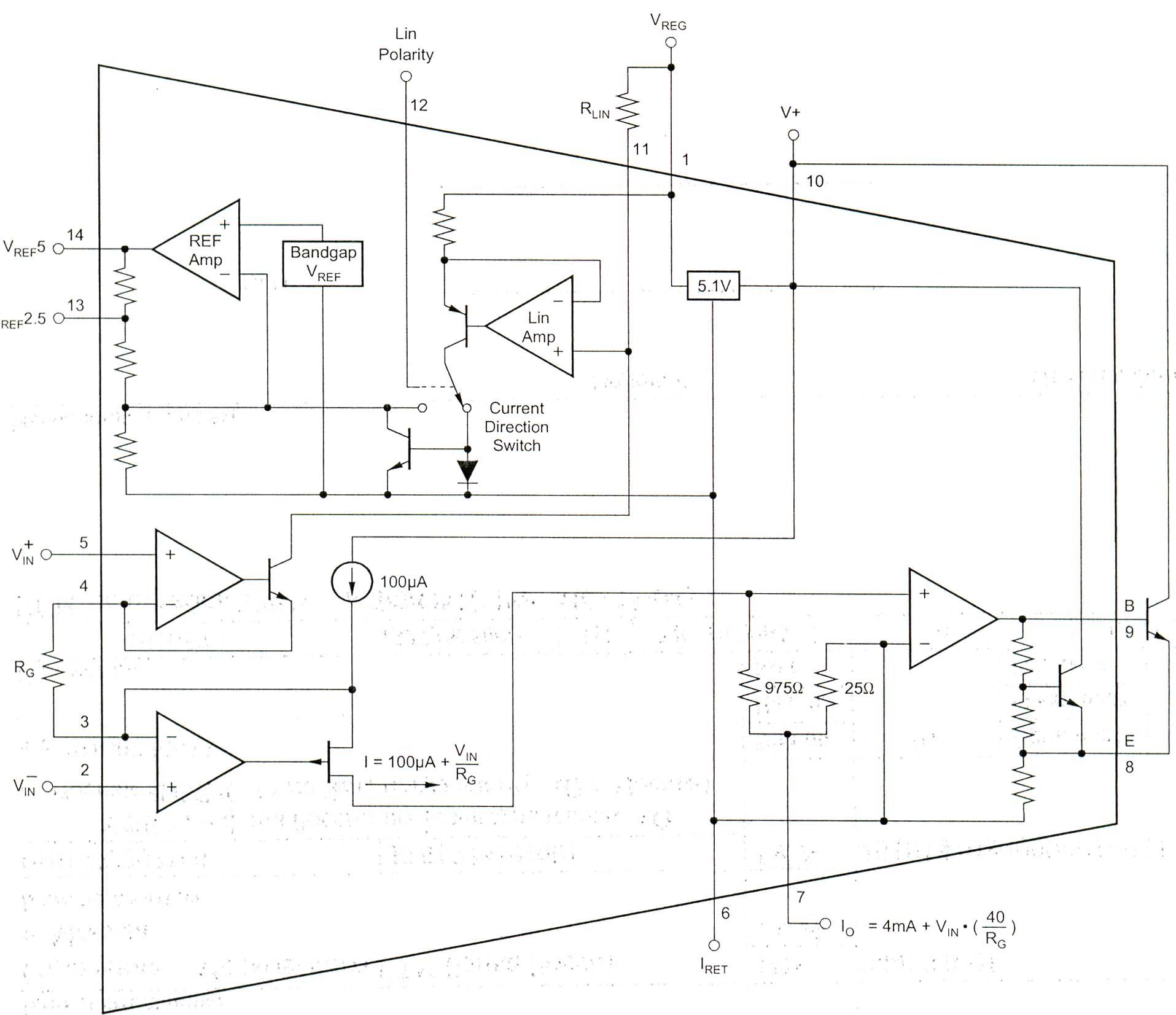
Рисунок 3.3 – Принципиальная электрическая схема микросхемы XTR 106
Выводы микросхемы XTR 106 изображены на рисунке 3.4.
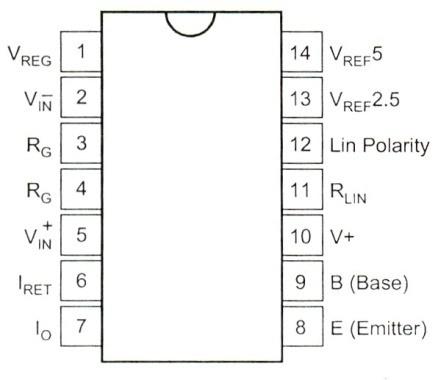
Рисунок 3.4 – Выводы микросхемы XTR 106
Для первичной обработки аналогового сигнала чувствительного элемента датчика часто применяют операционные усилители, выводы и структура которых показаны на рисунке 3.5.
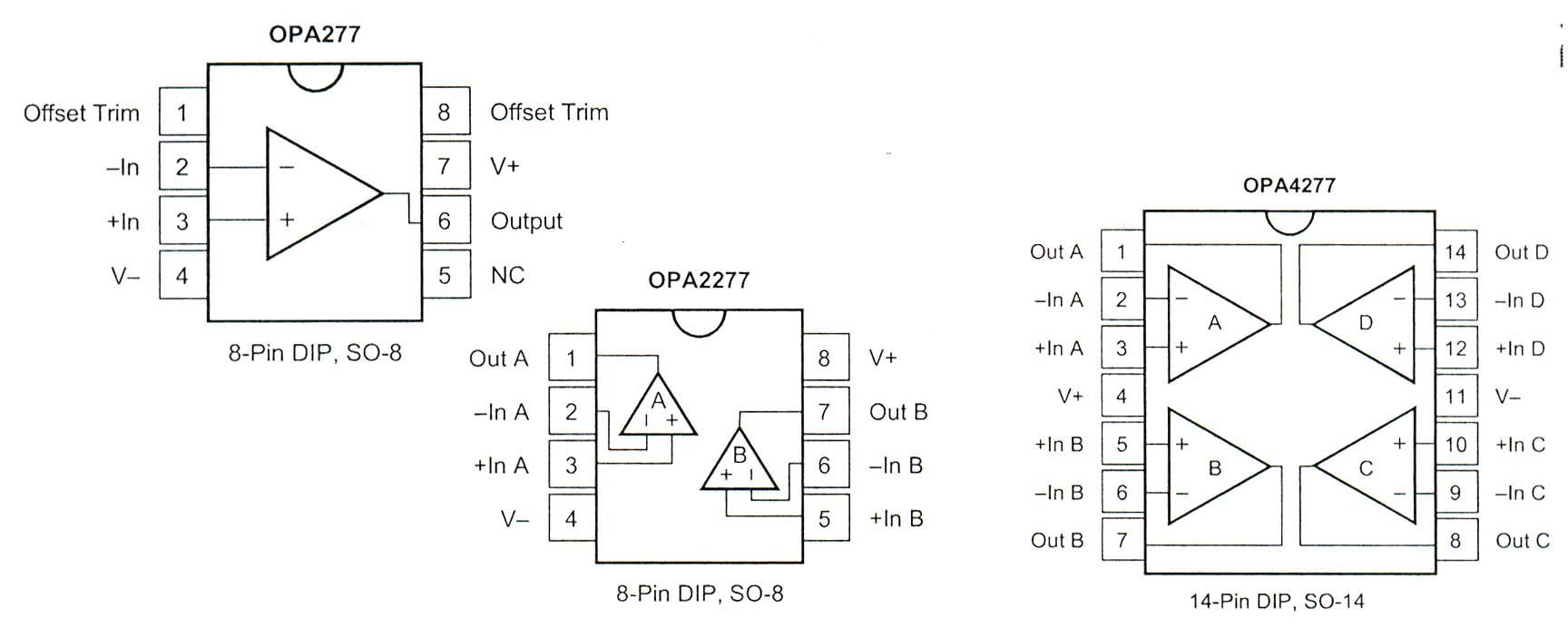
Рисунок 3.5 – Структура операционных усилителей OPA277, OPA2277,
OPA 4277
Один из вариантов схемы измерительного преобразователя для работы с тензорезистивным мостом на микросхеме XTR 106 представлен ниже на рисунке 3.6.
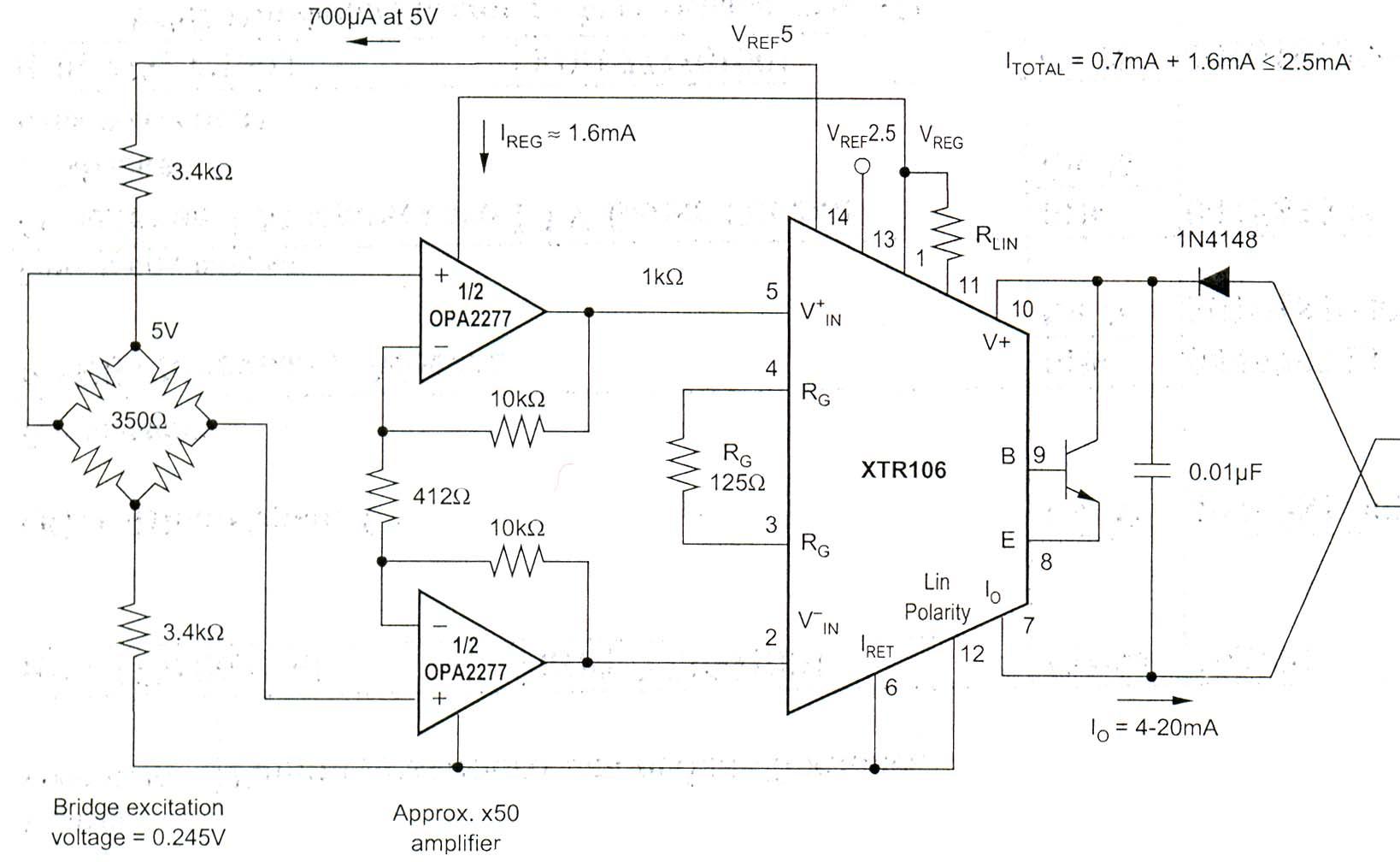
Рисунок 3.6 – Принципиальная электрическая схема датчика с мостовым
чувствительным элементом на основе микросхемы XTR 106
Чтобы обеспечить постоянный потенциал тензорезистивного моста относительно общей точки схемы, его противоположные плечи выполняют из полупроводника с разной проводимостью. Линеаризация статической характеристики моста осуществляется операционными усилителями микросхемы OPA2277, которые включены в противоположные точки измерительной диагонали моста.
Микросхемы XTR 105, XTR 106 могут применяться для преобразования термоЭДС термопары в токовый сигнал 4…20 мА. Схема измерительного преобразователя для термопары ХА (К) изображена на рисунке 3.7.
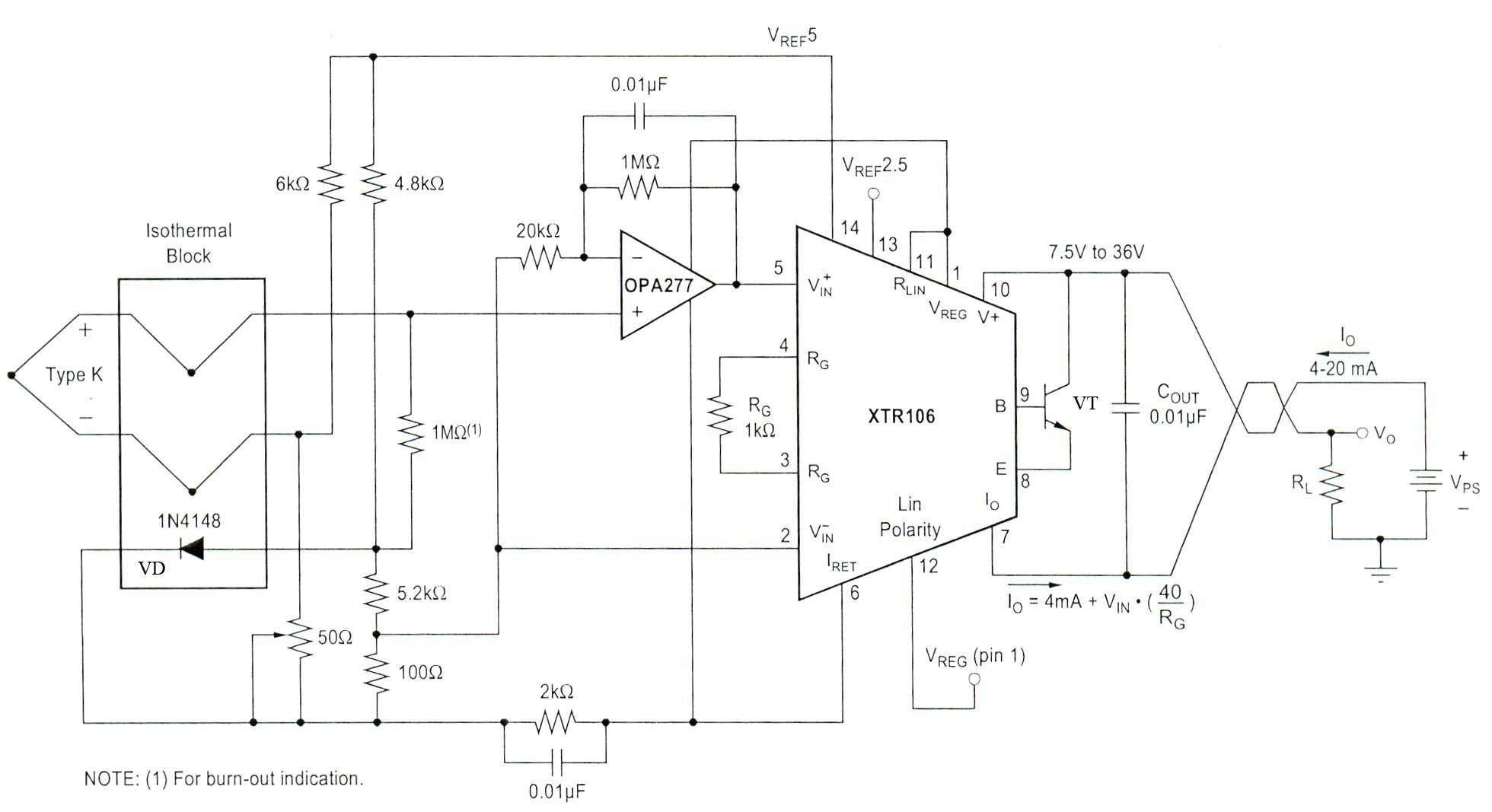
Рисунок 3.7 – Принципиальная электрическая схема измерительного
преобразователя температуры с чувствительным элементом термопарой ХА на основе микросхемы XTR 106
В схеме используется диодный термодатчик для компенсации изменения температуры холодных концов термопары, чувствительность которого примерно в 100 раз выше, чем у термопар. В диапазоне температуры -60…+1500С падение напряжения на диоде линейно зависит от температуры измеряемой среды.
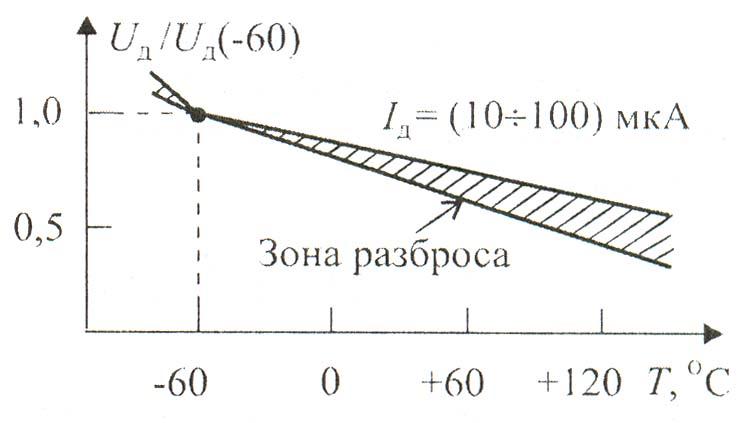
Рисунок 3.8 – Зависимость падения напряжения на диоде от температуры
Принципиальная электрическая схема измерительного преобразователя температуры с чувствительным элементом ТСП 100, реализованного на микросхеме XTR 105, представлена ниже на рисунке 3.9.
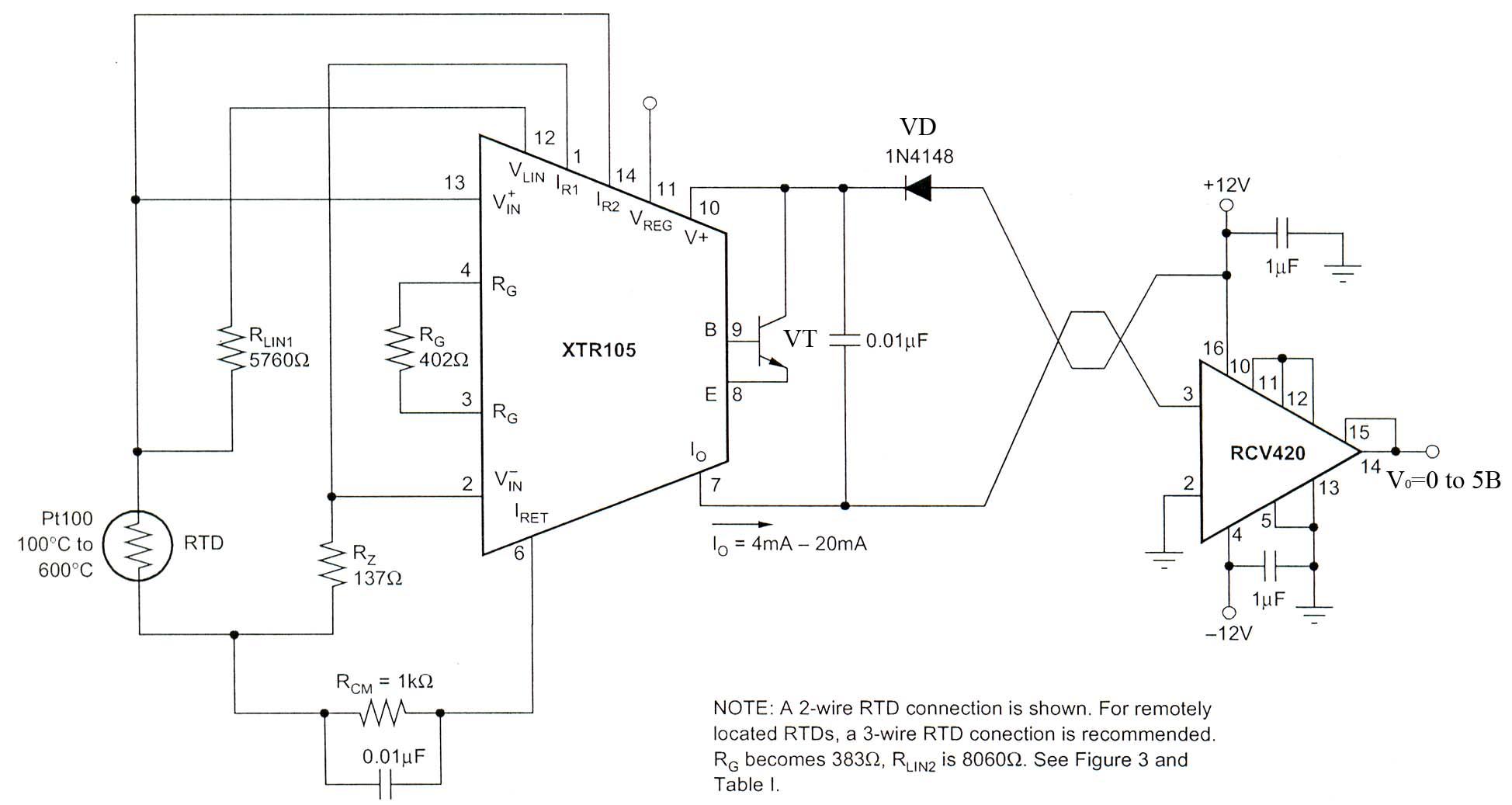
Рисунок 3.9 – Схема измерительного преобразователя температуры с чувствительным элементом ТСП 100 на основе микросхемы XTR 105
С помощью микросхемы RCV 420 на выходе измерительного преобразователя формируется сигнал 0÷5 В постоянного тока, который можно подключить к АЦП и далее использовать в цифровых устройствах.
Микросхема XTR 108 предоставляет разработчику наибольшие возможности благодаря своей структуре. Входящие в её состав программируемый усилитель (PGA) и два источника опорного тока обозначенные цифрами 1, 2 связаны с шестью входами посредством мультиплексора, что позволяет независимо управлять подключением каждого источника тока и входа PGA к любому входу, в том числе - к одному и тому же. Питание датчиков может быть организовано от источника образцового напряжения, двумя отдельными источниками тока или одним с удвоенным током с возможностью их подключения к PGA или к отдельному выводу микросхемы. Таким образом, возможна совместная работа как с терморезистором сопротивлением 10 Ом …10 кОм по двух и трёх проводным схемам подключения, так и с мостовым резистивным датчиком без установки активных компонентов. Микросхема XTR 108 оснащена схемой линеаризации, в которую встроена схема цифровой калибровки, позволяющая компенсировать разброс опорных токов, ток смещения PGA и погрешности линеаризации. Калибровочные данные хранятся во внешней микросхеме EEPROM, для подключения к которой предусмотрен SPI – совместимый интерфейс. Через этот же интерфейс можно управлять коэффициентом усиления PGA (семь значений в диапазоне от 6,25 до 400,00). Единственным недостатком микросхемы является необходимость установки в выходном каскаде усиления полевого транзистора MOSFET c n – каналом, работающего в не насыщенном режиме (с диодом Шотки). Функциональная схема микросхемы XTR 108 изображена на рисунке 3.10.
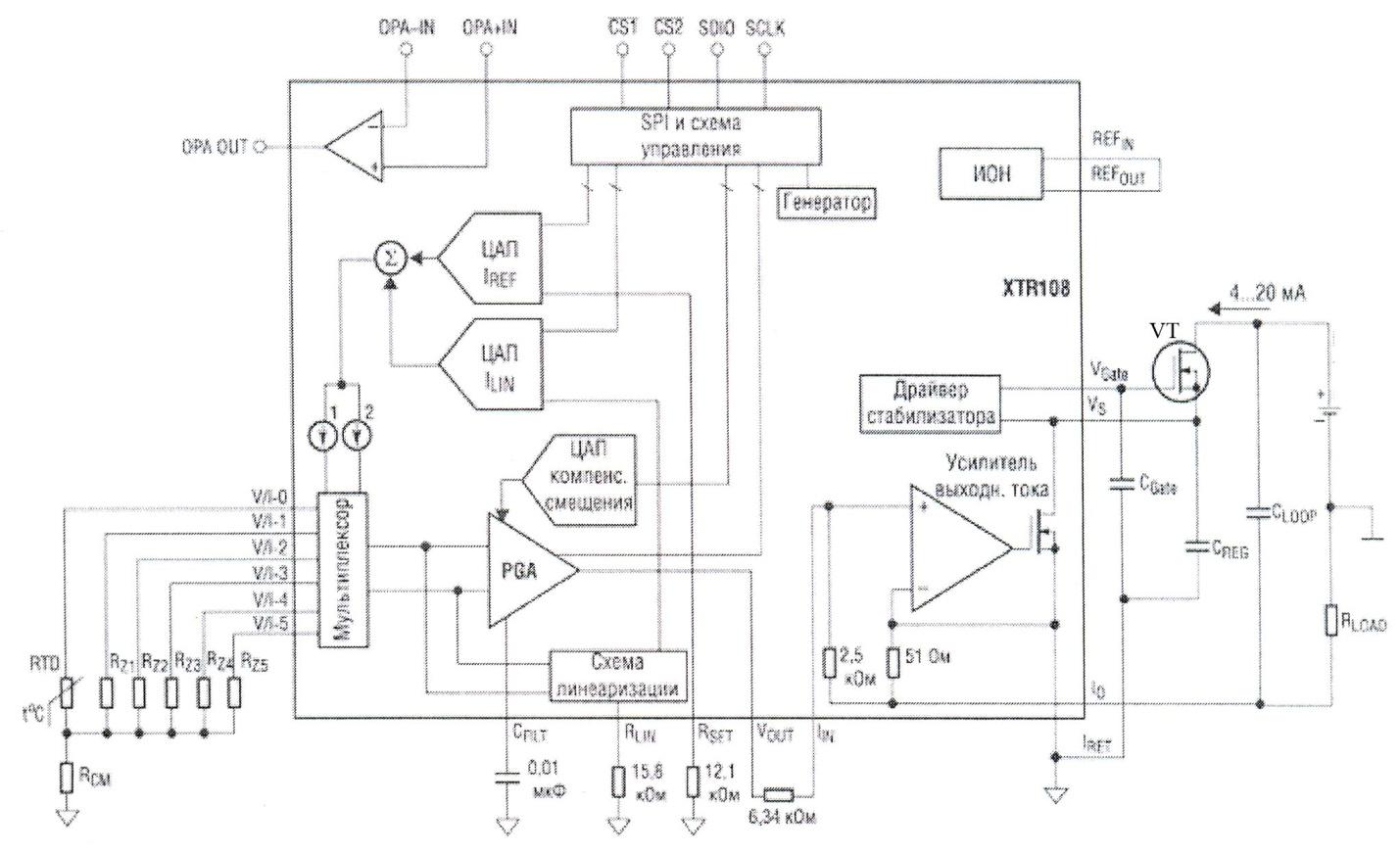
Рисунок 3.10 – Функциональная схема и выводы микросхемы XTR 108
3.2.2 Принципиальные схемы реальных измерительных
преобразователей технических величин
Современный электропривод обычно имеет датчик положения с выходным сигналом (4 ÷ 20) мА постоянного тока. Сам датчик положения представляет собой потенциометр с сопротивлением (0 ÷ 100) Ом или (0 ÷ 200) Ом с преобразователем «сопротивление-ток». Принципиальная электрическая схема преобразователя «сопротивление-ток» изображена ниже на рисунке 3.11.
В схеме преобразователя обозначено RP (датчик положения привода); R0 (установка нуля - 4 мА); RK (коэффициент усиления микросхемы DD1, установка 20 мА); R1 (ограничитель тока); RСТ, ССТ (элементы коррекции – защита от возбуждения микросхемы DD1); микросхема DD1 (XTR118U); транзистор VT1 (2C2073); С1 (фильтр); диод VD1 (защита от не правильного подключения полярности блока питания); GB (блок питания 24 В постоянного тока).
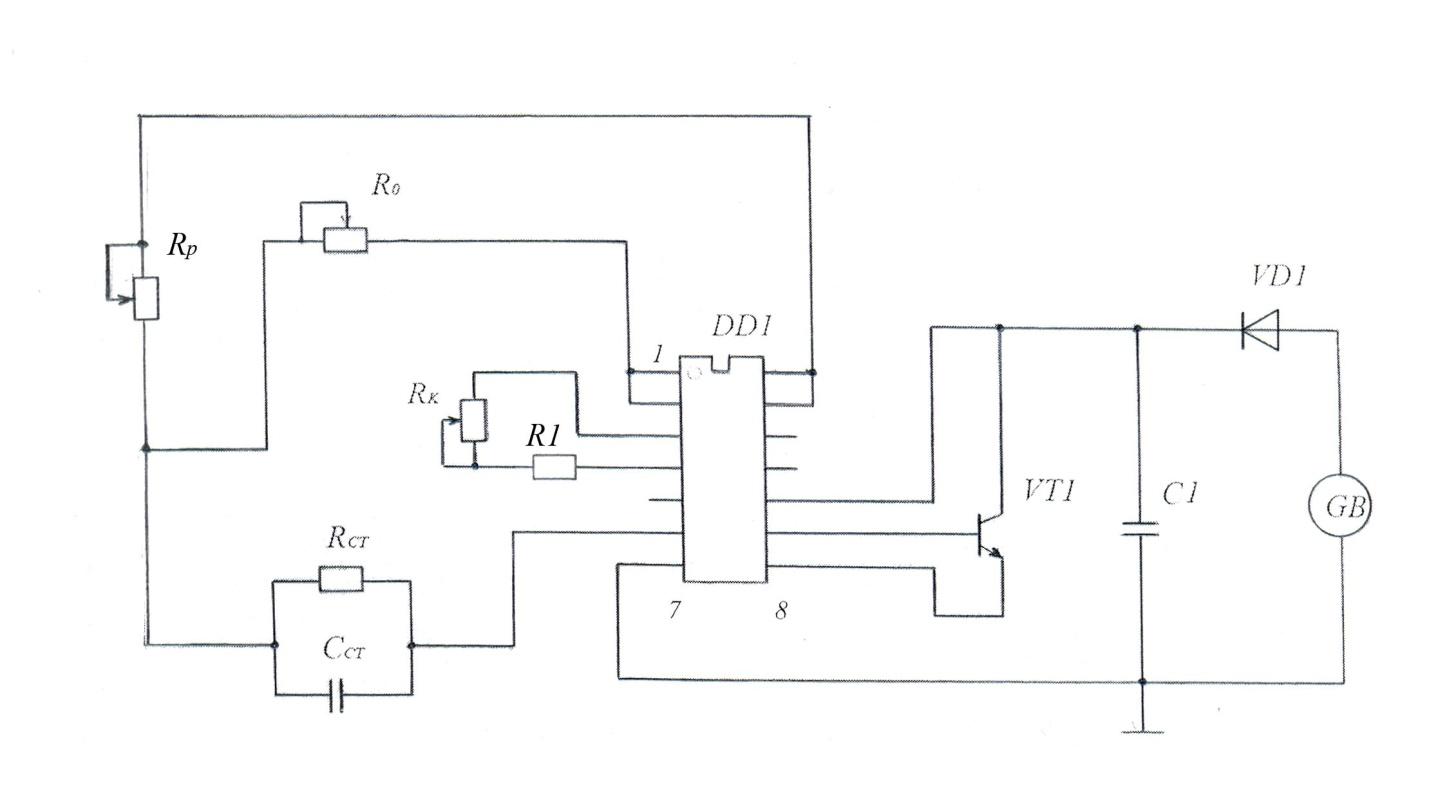
Рисунок 3.11 – Схема преобразователя «сопротивление-ток»
Принципиальная схема датчика температуры приведена на рисунке 3.12.
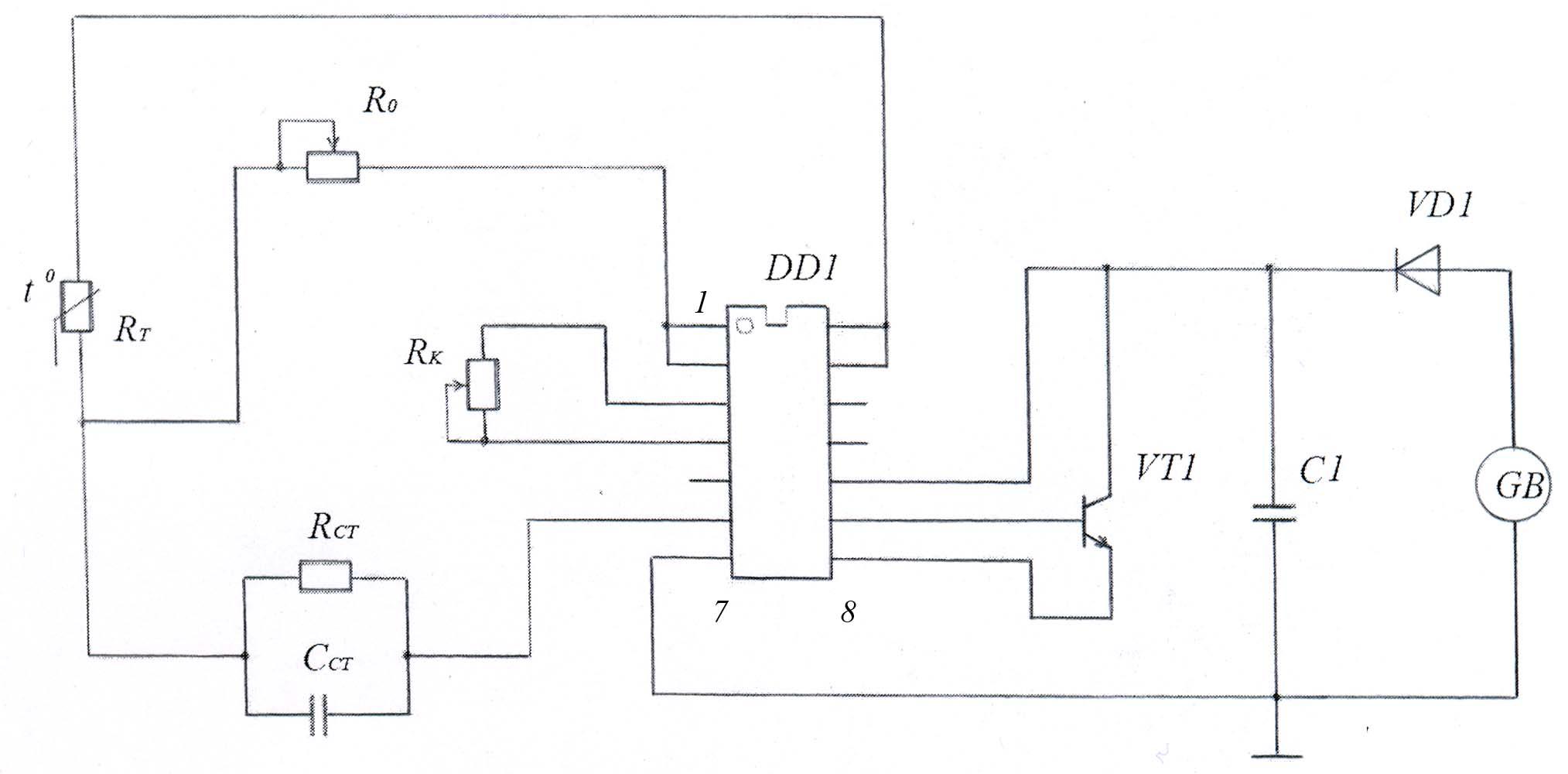
Рисунок 3.12 – Схема датчика температуры ТСП-100
В схеме ТСП-100 обозначено: RТ (чувствительный элемент датчика температуры); R0 (установка нуля - 4 мА); RK (коэффициент усиления микросхемы DD1, установка 20 мА); RСТ, ССТ (элементы коррекции – защита от возбуждения микросхемы DD1); микросхема DD1 (XTR105U); транзистор VT1 (2C2073); С1 (фильтр); диод VD1 (защита от неправильного подключения полярности блока питания); GB (блок питания, 24 В постоянного тока).
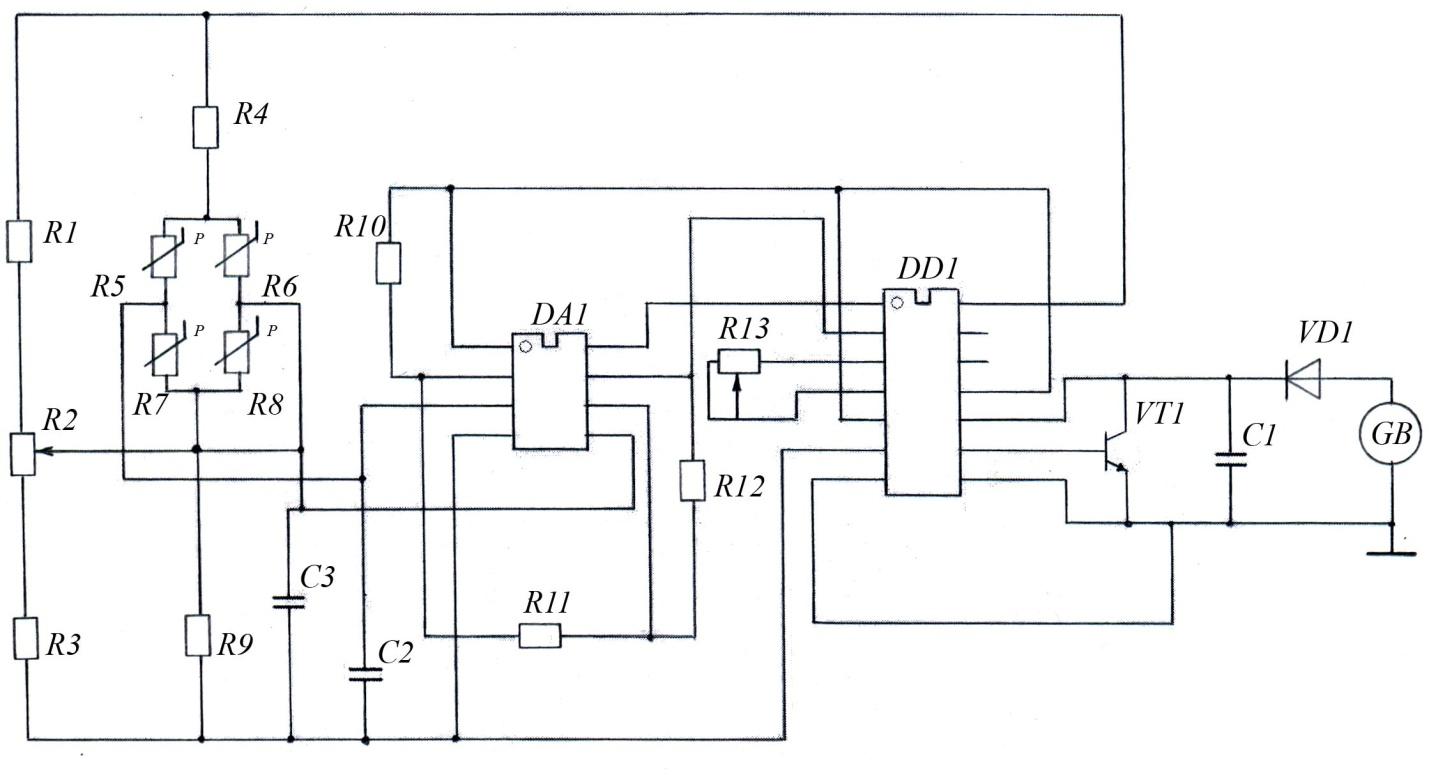
R1, R2, R3 – установка нуля (4 мА); R4, R9 – ограничители тока; R5, R6, R7, R8 – чувствительный элемент датчика (тензорезистивный мост); R10, R11, R12 – определяют коэффициент усиления ОУ DA1 (ОРА2277); R13 – коэффициент усиления микросхемы DD1 (XTR 106), установка 20 мА; VD1 – защита от неправильного подключения полярности блока питания
Рисунок 3.13 – Схема датчика давления
Контрольные вопросы:
-
Начертите принципиальную электрическую схему измерения переменного тока на базе дросселей насыщения.
-
Опишите принцип действия устройства, использующего дроссели насыщения для измерения переменного напряжения.
-
В чём сущность явления Зеебека?
-
В чём отличие полупроводниковых резисторов от металлических резисторов?
-
Почему в промышленной автоматике при изготовлении датчиков технических величин используют специализированные аналоговые микросхемы?
Лабораторная работа № 4
«Изучение устройств управления и защиты электрических цепей (нажимные кнопки, автоматические выключатели, разъединители, магнитные пускатели, другие электромагнитные реле – тепловые, времени, максимального тока) и составление их принципиальной электрической схемы»
Цель работы: Изучить принцип действия устройств управления и защиты электрических цепей.
Задание на лабораторную работу:
1.Ознакомиться с основными узлами электромагнитных реле, нажимных кнопок, автоматических выключателей.
2.Начертить принципиальные электрические схемы устройств управления и защиты электрических цепей по заданию руководителя занятий.
3.Оформить протокол лабораторной работы в соответствии с заданной формой и защитить его.
Таблица 4.1 – Применяемые приборы
|
№№ п/п |
Наименование и тип прибора |
Примечание |
|
1 |
Мультиметр DT - 838 |
|
4 Электрические аппараты управления
4.1 Назначение и классификация электрических аппаратов
Для управления работой электрического оборудования необходимо осуществлять включение и переключение или выключение различных устройств. Все электромеханические устройства, как правило, подключаются к общей сети через специальные автоматические выключатели или предохранители, которые защищают сеть от повреждения в случае короткого замыкания потребителя электрической энергии.
В качестве электрических аппаратов управления используют разнообразные устройства: первичные преобразователи различных механических, тепловых, химических и других величин в электрические, устройства обработки электрических сигналов, устройства дистанционного управления.
Для переключения устройств высокого напряжения используют специальные сложные аппараты, в которых принимаются меры против образования электрической дуги и для её гашения, а также предусматривается защита при увеличении электрического тока.
Во всех этих случаях используются электрические аппараты – устройства для включения, переключения и выключения электрических и механических цепей, а также для плавного управления режимами работы электрических приёмников.
По назначению электрические аппараты управления классифицируют как :
-аппараты управления режимом работы электрооборудования (контакторы, пускатели, реле, электромагнитные муфты, командоаппараты и переключатели);
-аппараты распределительных устройств (автоматические выключатели и предохранители);
-аппараты регулирования и контроля (стабилизаторы и датчики).
Важнейшей частью электрических аппаратов является коммутирующий узел, который характеризуется переходным сопротивлением: состояние «замкнуто» - RЭА ≤ Rприёмника , состояние «разомкнуто» - RЭА ≥Rприёмника . Процессы коммутации сопровождаются импульсами тока, напряжения и появлением электромагнитных полей, которые могут быть опасными для людей и мешать работе других электротехнических и электронных устройств. Отсюда возникает необходимость решения проблемы электромагнитной совместимости электрических машин и электрической безопасности. По типу коммутирующего узла различают контактные, бесконтактные и гибридные электрические аппараты управления.
В контактных электрических аппаратах есть электрические контакты, которые замыкаются или размыкаются под действием механической силы, создаваемой приводом. Привод может быть электромагнитный, пневматический, механический и др.
Достоинства: большая надёжность, высокая перегрузочная способность, большие номинальные значения токов и напряжений в коммутаторной цепи.
Недостатки: узость контактных поверхностей, невысокая частота коммутаций, «дребезг» контактов.
В бесконтактном электрическом аппарате коммутация достигается изменением сопротивления нелинейного элемента (транзисторы, тиристоры и др.).
Достоинства: нет подвижных частей, малые габариты, большой срок службы, низкий уровень мощности управляющего сигнала.
Недостатки: большое сопротивление в состоянии «замкнуто» и малое – в состоянии «разомкнуто»; низкая перегрузочная способность.
В зависимости от напряжения в коммутируемой цепи применяются аппараты высокого (› 1000 В) или низкого напряжения. В зависимости от значения коммутируемого тока используют аппараты различного конструктивного исполнения.
По характеру физической величины используемой в электрических аппаратах управления последние классифицируют следующим образом:
- тепловые, реагирующие на изменение температуры;
- механические, реагирующие на перемещение, изменение давления, изменение частоты вращения и т. п.
- магнитные, реагирующие на изменение магнитных величин;
- акустические, реагирующие на силу звука;
- оптические, реагирующие на изменение освещённости.
4.2 Устройство и принцип действия коммутационных контактных аппаратов
Контактный аппарат содержит две части: электрические контакты и привод для управления контактами. Форма, размеры, материал, типы покрытия контактов выбирают в зависимости от значений напряжения и тока в управляемой электрической цепи.
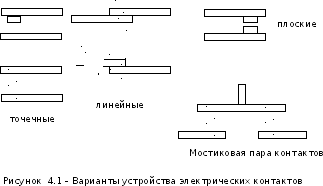
Контакты изготовляют из материалов, обладающих небольшим удельным электрическим сопротивлением (медь, сплавы с никелем, иридием, металлокерамические соединения). Для повышения износоустойчивости контакты покрывают вольфрамом или металлокерамическим соединением. Иногда плотность соединения обеспечивается специальными пружинами.
Для предотвращения разогрева и повреждения контактов ускоряют процесс размыкания и используют тугоплавкие материалы, увеличивают расстояние между контактами в разомкнутом состоянии, применяют специальные активные и пассивные дугогасительные элементы.
Перемещение контактов производится с помощью привода. Наиболее просто устроены приводы командоаппаратов, в которых электрические контакты замыкаются под действием механической силы, создаваемой движением руки (нажатие кнопки, поворот руки или рычага) или при движении частей какого-либо механизма (концевые и путевые выключатели). В контакторах, магнитных пускателях, реле используют электромагнитный привод контактов с помощью электромагнитов постоянного или переменного тока.
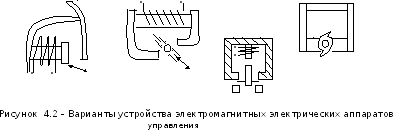
Все элементы, формирующие магнитное поле изготавливаются из ферромагнитных материалов. В аппаратах переменного тока они изготовляются шихтованными для уменьшения потерь энергии на вихревые токи.
При наличии в катушке тока, превышающего определенные значения (ток срабатывания), в магнитной системе возникает магнитное поле достаточное для перемещения якоря в другое устойчивое положение. При этом преодолевается сопротивление рабочей пружины и с помощью механических связей размыкаются или замыкаются электрические контакты.
К электрическим аппаратам ручного управления относят кнопки и ключи управления, командоаппараты и силовые коммутационные аппараты (рубильники, пакетные выключатели и силовые контроллеры).
Кнопки управления предназначены для подачи оператором управляющего воздействия на электропривод. Две, три и более кнопок смонтированных в одном корпусе, образуют кнопочную станцию. Одноцепные кнопки управления выпускают с замыкающими и размыкающими контактами. Контакты на схемах изображают в «нормальном» состоянии, когда на них не оказывается механическое, электрическое, магнитное воздействие. Двухцепные кнопки управления имеют обе пары указанных контактов, на которые действует один привод.
Особенностью кнопок управления является их способность возвращаться в исходное положение (самовозврат) после снятия воздействия. Выпускают кнопки цепей переменного тока на напряжение до 500 В и постоянного тока на напряжение до 220 В при токах до 24 А. На принципиальных электрических схемах кнопки ручного управления обозначают следующим образом:
Ключи управления предназначены для подачи управляющего воздействия на электропривод и имеют два или более фиксированных положений рукоятки и несколько замыкающих и размыкающих контактов. Ключи управления рассчитаны на такие же напряжения и токи, что и кнопки. На принципиальных электрических схемах ключи управления обозначают таким образом:
Универсальные переключатели используются для коммутации цепей катушек контакторов, масляных выключателей, управления многоскоростными асинхронными двигателями и другими устройствами.
4.3 Коммутационные аппараты для управления электротехническими устройствами низкого напряжения
4.3.1 Магнитный пускатель и автоматические выключатели
Схема внешних соединений трёхфазного магнитного пускателя имеет вид:
L1 L2 L3 NO NC A1


КМ1




T1 T2 T3 NO NC A2
L1, L2, L3 – клеммы подключения линии питания; Т1, Т2, Т3 – клеммы подключения нагрузки; NO – клеммы нормально открытого контакта; NC – клеммы нормально закрытого контакта; А1 и А2 – входная и выходная клеммы питания катушки управления магнитного пускателя; КМ1 – магнитный пускатель № 1 на данной схеме
Рисунок 7.3 – Схема внешних соединений магнитного пускателя
Обычно в пускателе есть несколько пар основных (силовых) и вспомогательных контактов, управляемых одним рычагом привода. Контакты пускателя на принципиальной электрической схеме обозначают последовательно следующим образом: силовые (клеммы LI – TI) как КМ1-1, КМ1-2, КМ1-3; вспомогательные (клеммы NO и NC) как КМ1-3, КМ1-4. Важным элементом пускателя является дугогасительное устройство. Питание катушки управления современных магнитных пускателей осуществляется напряжением питания 24 В постоянного или переменного тока или напряжением питания 220 В переменного тока.
Для коммутации ряда устройств с защитой от аварийных режимов применяют аппарат, который называется автоматическим воздушным выключателем. Изготавливают автоматы универсальные для установки в закрытых шкафах распределительных устройств и установочные, имеющие пластмассовый защитный корпус для установки вне шкафов. Универсальные автоматы могут иметь ручной или электромагнитный привод для дистанционного управления. Установочные автоматы выполняют с ручным приводом.
В автомате имеются два защитных устройства – тепловой и электромагнитный расцепители. Оба расцепителя освобождают или не позволяют зафиксировать механический расцепитель контактора. Тепловой расцепитель – это биметаллическая пластина, которая деформируется при нагревании и освобождает механический расцепитель. Электромагнитный расцепитель имеет катушку, которая соединена последовательно с управляемыми контактами. При превышении определенного значения тока якорь, соединенный с механическим расцепителем притягивается к сердечнику и освобождает механический расцепитель. Защитные расцепители не только отключают, но и не позволяют вновь включать автомат до тех пор, пока не будут устранены причины отключения.
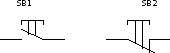
Устройство одного из типов магнитного контактора постоянного тока показано на рисунке 4.4. Контактный узел состоит из неподвижного 1 и подвижного 3 контактов, помещённых в дугогасительную камеру 2. Контакт 3 закреплён на рычаге 4, связанном с помощью пружины 5 с якорем 6, и соединён с управляемой электрической цепью гибкой медной лентой 10. Электромагнитный привод контактора имеет возвратную пружину 7, сердечник 8 и обмотку 9.
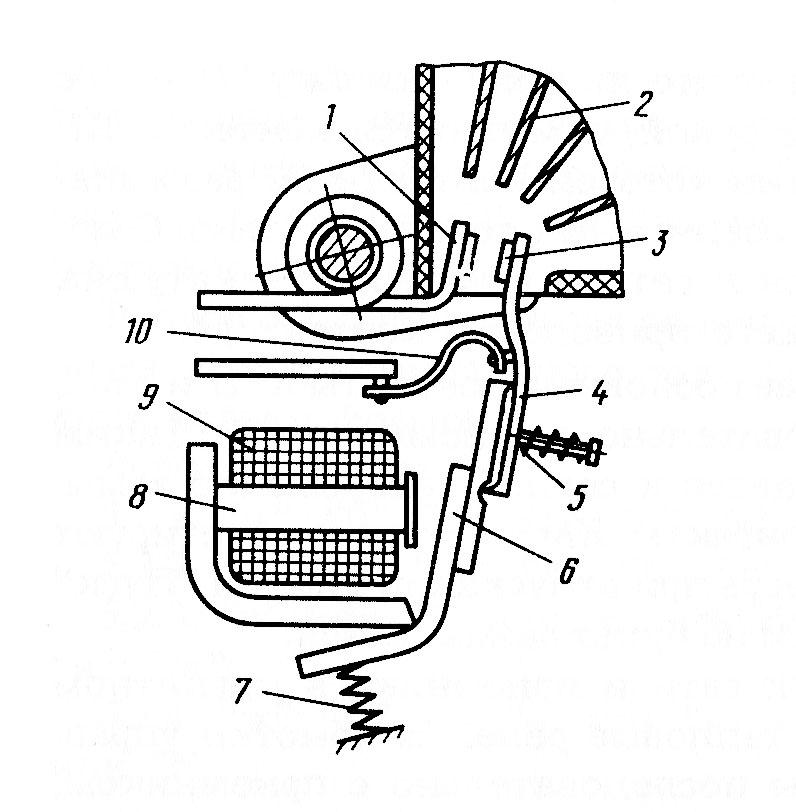
Рисунок 4.4. - Конструктивная схема контактора постоянного тока
Важным элементом контактора является дугогасительное устройство. Его принцип действия таков: при размыкании между контактами в результате дугового разряда образуется ионизированная газовая область с движущимися зарядами. Этот ток создаёт магнитное поле между ферромагнитными пластинами, между которыми закреплены контакты 3. Магнитная сила перемещает ионизированную область в узкую щель между элементами дугогасительной решётки, которые изготовлены из изоляционного материала. Решётка отбирает тепловую энергию из области дугового разряда.
Для коммутации электротехнических устройств с защитой от аварийных режимов применяют автоматический воздушный выключатель (автомат). Изготовляют автоматы универсальные для установки в закрытых шкафах распределительных устройств и установочные, имеющие пластмассовый защитный корпус для установки вне шкафов. Универсальные автоматы могут иметь ручной или электромагнитный привод для дистанционного управления. Установочные автоматы выполняют с ручным приводом.
На рисунке 4.5 приведена схема установочного автомата. Включение и отключение производится рукояткой 11, которая находится в пазу изоляционной крышки корпуса 9.
Для включения рукоятку поднимают вверх. При этом пластина 10 свободным концом зацепляется за зуб 13 расцепителя 14 и фиксируется, пружина 12 тянет шарнир рычагов 4 и 5 наверх, рычаг 6 с подвижным контактом поворачивается влево до неподвижного контакта 7 и, таким образом, контакты замыкаются. Цепь автомата замыкается через гибкую токоведущую шину 3. Выключение осуществляют поворотом рукоятки вниз. В автомате установлена дугогасительная решётка 8.
В автомате есть два защитных устройства: тепловой и электромагнитный расцепители. Оба расцепителя не позволяют зафиксировать пластину 10 и расцепитель 14.
Рисунок 4.5 - Схема воздушного автоматического выключателя переменного тока
Тепловой расцепитель – биметаллическая пластинка 1, которая деформируется при нагревании и опускается вниз. При этом поворачивается рычаг 14, освобождается пластина 10 и размыкаются контакты автомата. Так потребитель защищается от длительного превышения номинального значения тока.
Электромагнитный расцепитель имеет катушку, которая соединена последовательно с управляемыми контактами. При кратковременном превышении номинального значения тока якорь в виде ферромагнитной шайбы 2 притягивается к сердечнику катушки (влево), рычаг 14 расцепителя повернётся и управляемые контакты 6 разомкнутся. Причём, защитные расцепители не только отключают, но и не позволяют включить автомат вновь до тех пор пока не будут устранены причины защитного отключения (чрезмерный нагрев элемента тепловой защиты или недопустимо большой ток приёмника.
4.3.2 Электромагнитные реле систем автоматического управления и защиты
Электромагнитное реле – это электрический контактный аппарат, имеющий два или более устойчивых положений в зависимости от управляющих токов и напряжений. Указанные устойчивые состояния отличаются замкнутыми, разомкнутыми или переключёнными контактами.
Простейшее коммутационное промежуточное реле с приводом клапанного вида устроено аналогично магнитному контактору. Процесс «срабатывания» в этом реле не зависят от направления тока: оно работает как в цепях постоянного, так и переменного тока. Иногда такое реле называют нейтральным.
Реле подразделяют на реле токовые и реле напряжения. Электромагнитные реле имеют от 2 до 20 контактов. Допустимое значение тока составляет от 5 мА до 5 А и более, а допустимое напряжения размыкания от 5 до 400 В. Время «срабатывания» - интервал времени от появления управляющего сигнала до момента коммутации – составляет от 0,1 до сотен миллисекунд; износостойкость контактов – не менее 106 срабатываний.
а – реле максимального тока; б – реле максимального напряжения;
в – реле минимального тока; г – реле минимального напряжения
Рисунок 4.6 - Функциональные схемы защитных реле тока и напряжения
На функциональной схеме электромагниты защитных реле включены различно: у реле тока обмотка электромагнита включена последовательно, так как через неё должен проходить весь ток, проходящий по цепи; обмотка реле напряжения включена параллельно между двумя проводами, так как именно таким способом измеряют напряжение между ними. Обмотку реле тока изготовляют из толстой проволоки с малым числом витков, чтобы катушка оказывала меньшее сопротивление току. В реле напряжения обмотка имеет большое число витков тонкой проволоки, т.е., большое электрическое сопротивление, чтобы отвести в цепь измерения небольшой ток. Втягивающее усилие электромагнита пропорционально произведению силы тока на количество витков катушки (намагничивающей силе).
В реле максимального тока и максимального напряжения пружина удерживает контакты закрытыми, а электромагнит эти контакты размыкает. В минимальных реле наоборот, - пружина размыкает контакты, когда электромагнитная сила оказывается недостаточной для удержания контактов в замкнутом состоянии.
Чтобы осуществить коммутацию в зависимости от направления управляющего тока или напряжения, применяют поляризованные реле. Схема такого реле приведена ниже.
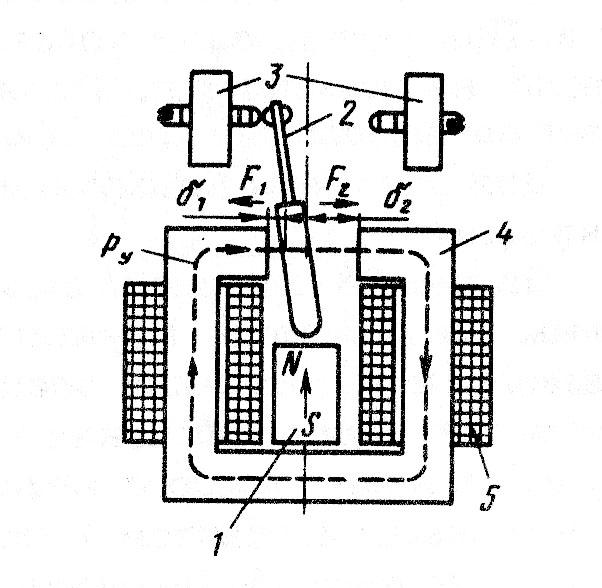
Рисунок 4.7 - Схема устройства поляризованного реле
Магнитная система реле состоит из двух управляющих катушек 5, которые соединены последовательно; сердечника 4, постоянного магнита 1 и якоря 2, находящегося в воздушном зазоре сердечника, и контактов 3. Верхняя часть якоря и торцы сердечника являются противоположными полюсами и взаимно притягиваются с силами F1 и F2. Эти силы обратно пропорциональны зазорам между якорем и сердечником и поэтому якорь всегда занимает одно из двух положений.
Ток управляющих катушек создаёт дополнительное магнитное поле, которое создаёт намагничиванием новые магнитные полюса. Взаимодействие новых полюсов с полюсами постоянного магнита приводит к размыканию контактов или к их удерживанию.
Такое поляризованное реле называется двухпозиционным, состояние реле зависит от полярности управляющего сигнала. При уменьшении управляющего сигнала до нуля состояние реле не изменяется. Поляризованные реле рассчитаны на весьма небольшие токи и напряжения срабатывания.
4.3.3 Защитные реле для электротехнических устройств
Защитные реле применяют для защиты электродвигателей и других электрических устройств от превышения температуры, тока и напряжения их допустимых значений по условиям эксплуатации. Для защиты от превышения температуры используют тепловое реле, его принципиальная схема представлена ниже.
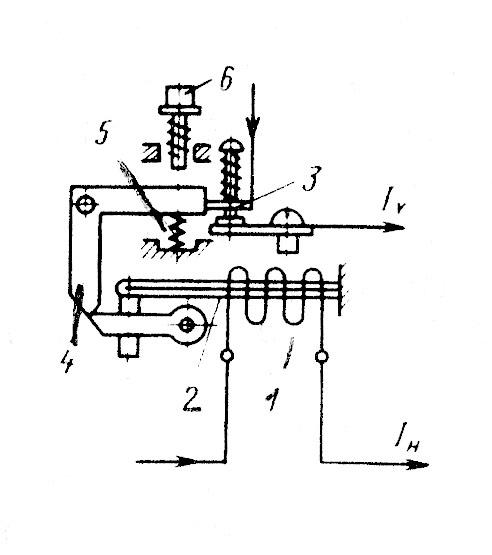
Рисунок 4.7 - Схема защитного теплового реле
Управляющей величиной является ток Iн защищаемого приёмника электрической энергии. Последовательно с приёмником включается нагревательный элемент 1, который нагревает термочувствительный элемент 2 – биметаллическую пластинку. При достаточно длительном нагревании током, значение которого превышает допускаемое, пластинка деформируется, опускаясь вниз. Рычаг 4 освобождается и под действием сжатой пружины 5 поворачивается против часовой стрелки. При этом подвижный контакт 3 размыкается и разрывает цепь управления. Последующее охлаждение биметаллической пластинки не приведёт к восстановлению замкнутого состояния контактов: для этого необходимо нажать кнопку возврата 6, которая сожмёт пружину 5 и отведёт рычаг 4.
Для защиты электрической сети и приёмника от импульсного изменения тока (напряжения) до недопустимых значений применяют защитные реле тока (напряжения).
Они отличаются от других специальным регулирующим значение тока или напряжения элементом, который позволяет установить с большой точностью ток (напряжение) срабатывания или отпускания. Например, реле максимального тока устроено следующим образом:
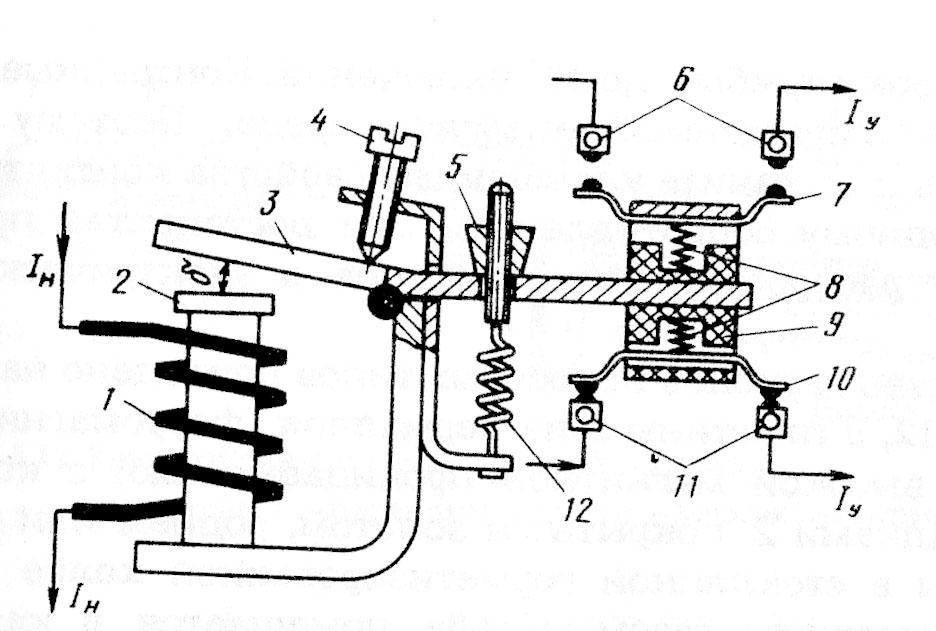
Рисунок 4.8 - Принципиальная схема реле максимального тока
Реле состоит из токовой обмотки 1, винта 4 для «регулировки» воздушного зазора между якорем 3 и сердечником 2, гайки 5 для «регулировки» натяжения возвратной пружины 12, пластмассовых колодок 9 для крепления двух пар подвижных контактов 7 и 10 , двух пар неподвижных контактов 6 и 11, контактных пружин 8 для сжатия пар коммутируемых контактов. Ток срабатывания реле регулируется изменением положения винта 4 и гайки 5. Время срабатывания реле при повышении тока до 1,3 Iсрабат. равно не более 0,1 с.
4.3.4 Современная реализация защитных функций
Реализация защитных и блокирующих функций в настоящее время осуществляется программно в системах управления, автоматического регулирования и контроля. Для этого измеряют посредством датчиков те технические величины, которые характеризуют состояние объекта регулирования и контроля, и включают в программное обеспечение регулирующих устройств соответствующие алгоритмы для реагирования на возникающие аварийные ситуации или неправильные действия оператора.
Таким образом, исчезает необходимость в широком использовании электромагнитных реле. Правда, при отказе автоматических регулирующих устройств некоторыми объектами регулирования и контроля возможно наступление тяжёлых последствий для окружающей среды и людей в результате аварии. В этом случае необходимо резервирование питания и самих электронных устройств, а в некоторых случаях применение дополнительных контактных или бесконтактных электромагнитных устройств автоматики и контроля, которыми можно управлять вручную.
4.3.5 Электромагнитные реле с магнитоуправляемыми контактами
Магнитоуправляемый контакт – устройство, имеющее контакты из упругого ферромагнитного материала, которые управляются внешним магнитным полем. Контакты выполняют несколько функций: они являются управляемым элементом, частью магнитного привода и рабочей пружиной.
В настоящее время выпускаются и широко используются герконы – магнитоуправляемые контакты, которые помещены в стеклянную герметизированную колбу. Контактные пары находятся в инертной среде. Благодаря малой массе подвижных частей герконы обладают большим быстродействием и высокой чувствительностью к управляющему воздействию, они выдерживают до 107 включений. Схемы герконов некоторых видов приведены ниже.
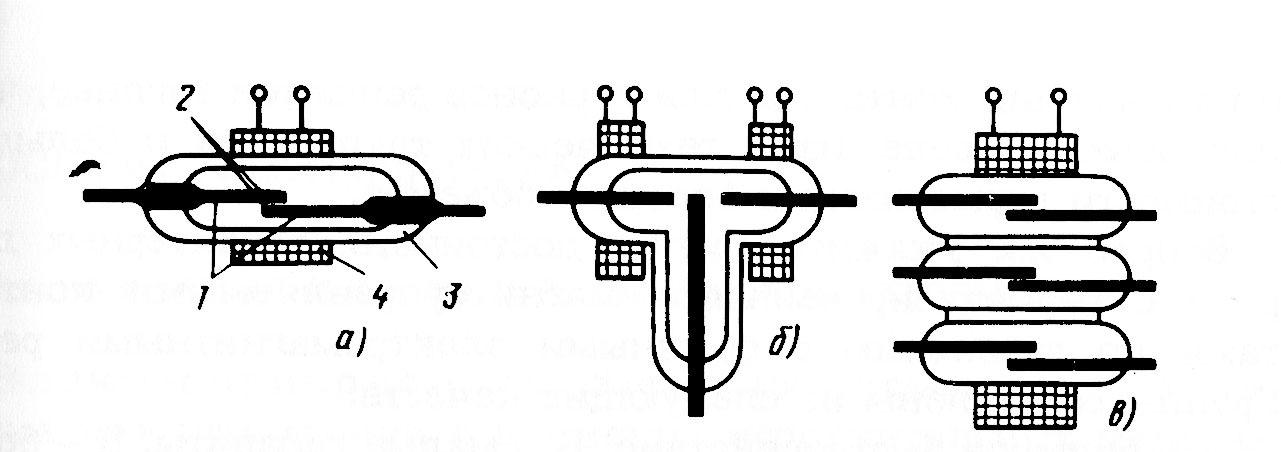
а) – замыкающее; б) – переключающее; в) – многоконтактное
Рисунок 4.9 - Конструктивные схемы герконовых реле
На рисунке 4.9,а пластины 1 замыкающего геркона выполнены из пермаллоя (ферромагнитный материал с высокой магнитной проницаемостью), контактные площадки 2 покрывают золотом, родием или серебром и помещают в стеклянную колбу 3; катушка 4 создаёт управляющее магнитное поле.
На рисунке 4.9, б изменением соотношения между значениями токов в катушках можно замыкать правую или левую пару контактов. На рисунке 7.9, в представлен многоконтактный геркон замыкающего типа. Так как герконы чувствительны к внешним магнитным полям, то их помещают в экранирующий корпус из магнитомягкого материала.
Один из типов магнитоуправляемого контакта – феррид – обладает свойством сохранять своё состояние после уменьшения до нуля управляющего тока. Ниже представлена конструктивная схема такого реле.
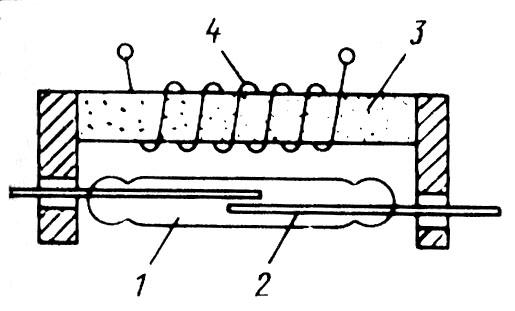
Рисунок 4.10 - Схема устройства феррид – герконового реле
с памятью состояния
В стеклянной герметизированного колбе 1 укреплены гибкие ферромагнитные пластины 2. Управляющая магнитная система содержит сердечник 3 из феррита, обладающего остаточной намагниченностью, и катушку 4.
Для замыкания контактов и намагничивания сердечника создают импульс тока в катушке определённой амплитуды и длительности. После отключения тока магнитное поле, создаваемого намагниченным сердечником, удерживает контакты в замкнутом состоянии. Для размыкания контактов создают отрицательный импульс для размагничивания сердечника.
Все рассмотренные герконы являются слаботочными и рассчитаны на коммутацию цепей с токами до 1 А. В цепях с большими токами используют герсиконы (силовые герконы). Устройство герсикона показано на рисунке 4.11.
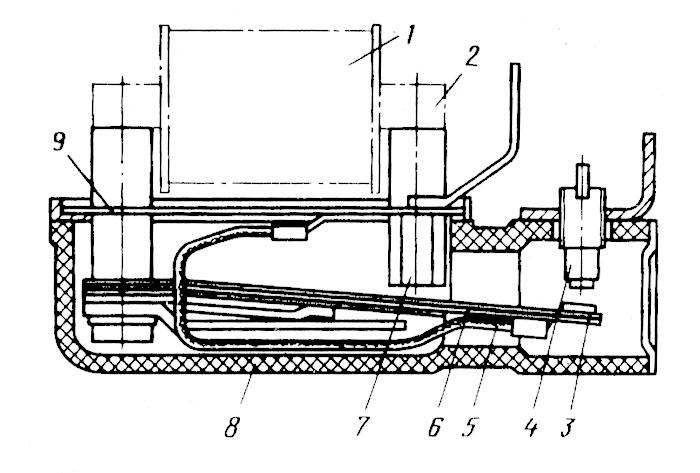
Рисунок 4.11 - Конструктивная схема герсикона
Управляющая катушка 1 помещена на ферромагнитном сердечнике 2. При токе в катушке, превышающем ток срабатывания, якорь 6 – упругая ферромагнитная пластинка – притянется к торцевой поверхности полюса 7 сердечника, подвижный контакт 3 соединится с неподвижным контактом 4. Керамический корпус 8 с не ферромагнитной металлической крышкой 9 создаёт герметичную область с инертными газами, в которой находятся контакты. Электрическое соединение управляемой цепи с подвижным контактом осуществляется гибкой токопроводящей шины 5 и крышки 9.
Проблема повышения допустимого тока размыкания для герконов решается труднее, чем для обычных реле, из-за технических трудностей.
4.3.6 Примеры современных высоковольтных реле
Высоковольтными называют реле, которые коммутируют цепи с напряжением выше 500 В и большими токами.
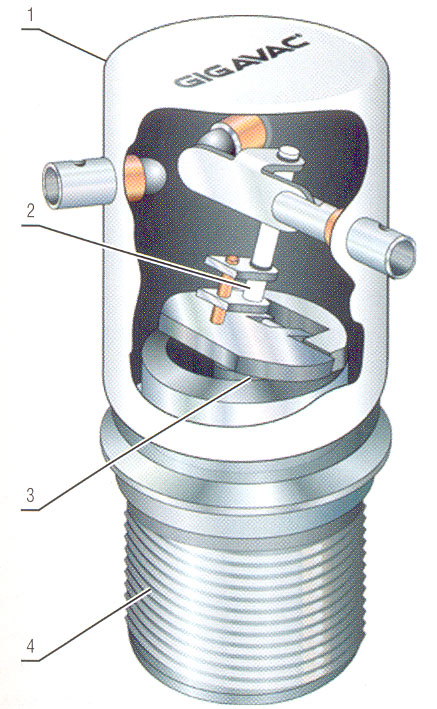
1 – керамическая оболочка; 2 – вращаемая арматура; 3 – пружина; 4 – катушка (в сборе)
Рисунок 4.12 - Газонаполненное высоковольтное реле с вращаемой арматурой
Для увеличения электрической прочности изоляции высоковольтные реле изготовляют вакуумными или наполняют инертным газом, так как диэлектрическая проницаемость вакуума, гексафторида серы (SF6) или инертного газа больше, чем у воздуха. Кроме того, в вакууме или среде инертного газа не происходит окисление контактов, что позволяет применять медные или родиевые контакты, которые способны выдерживать большие токи.
При размыкании контактов под нагрузкой при малых токах используют молибденовые или вольфрамовые контакты. Заполнение реле гексафторидом серы позволяет реле работать при больших бросках тока и разрядах ёмкостных нагрузок.
Катушка (в сборе) конструктивно является внешним элементом по отношению к вакуумной оболочке и её легко заменить.

Рисунок 4.13 - Вакуумное высоковольтное реле с диафрагмой,
которая изготовлена из молибдена или вольфрама
В конструкции реле с диафрагмой используется молибденовая диафрагма, позволяющая металлическому стержню поступательно перемещаться. При этом стержень проходит через отверстие в первом контакте реле и электрически с ним соединяется. Как только стержень достигает второго контакта и перестаёт двигаться, контакты замыкаются.
Контрольные вопросы:
-
Назовите основные узлы магнитного пускателя.
-
Каким образом используются вспомогательные контакты пускателя?
-
Какие Вам известны способы реализации функций защиты и блокировки при эксплуатации электрических цепей?
-
Начертите условное графическое и буквенное обозначение на принципиальных электрических схемах реле минимального напряжения.
-
В чём основное отличие герсиконов от герконов?
-
Опишите принцип действия поляризованного реле.
-
Объясните необходимость использования теплового реле при эксплуатации электроустановок.