

3.5. Ортонормированный базис на плоскости и в пространстве.
-
Рассмотрим на плоскости декартову прямоугольную систему координат Оху.
Выберем
на координатных осях Ох
и
Оу единичные
векторы (орты)
![]() и
и
![]() соответственно:
|
соответственно:
|![]() |
= |
|
= |![]() |
= 1 и
|
= 1 и
![]()
![]()
![]() (см. рис. 3.17). Векторы
(см. рис. 3.17). Векторы
![]() и
и
![]() образуют базис плоскости. Такой базис
называется ортонормированным.
образуют базис плоскости. Такой базис
называется ортонормированным.
Для
каждого вектора
![]() плоскости
плоскости
![]() ,
,![]() :
:
![]() =х
=х![]() +у
+у![]() ={х,у} (3.3)
={х,у} (3.3)
Е сли
начало вектора
сли
начало вектора
![]() совместить сточкой О
(см. рис. 3.17), то становится ясно, что
координаты х
и у
вектора
совместить сточкой О
(см. рис. 3.17), то становится ясно, что
координаты х
и у
вектора
![]() в базисе
в базисе
![]() и
и
![]() есть не что иное, как проекции вектора
на соответствующие оси координат:
есть не что иное, как проекции вектора
на соответствующие оси координат:
х=ПРх![]() ,
у=ПРу
,
у=ПРу![]()
Координаты
х
и у
называются декартовыми координатами
вектора
![]() .
Ясно также, что
.
Ясно также, что
|![]() |=
|=![]() ,
,
т.е.
модуль (длина) вектора в ортонормированном
базисе
![]() ,
,![]() равен квадратному корню из суммы
квадратов его координат.
равен квадратному корню из суммы
квадратов его координат.
Обозначим
через α и β углы, образованные вектором
![]() с осями Ох и
Оу
соответственно (см. рис. 3.17), тогда
с осями Ох и
Оу
соответственно (см. рис. 3.17), тогда
х=|![]() |соs
α,
у= |а|соs
β, или соs
α=
|соs
α,
у= |а|соs
β, или соs
α=![]() ,
соs
β=
,
соs
β=![]() .
.
Числа
соs
α
и соs
β
называются направляющими
косинусами
вектора
![]() .
Они обладают свойством:
.
Они обладают свойством:
![]() .
.
б)
Рассмотрим в пространстве декартову
прямоугольную систему координат Охуz.
Выберем на координатных осях Ох,
Оу и
Оz
координатные орты
![]() ,
,
![]() ,
,
![]() соответственно (см. рис. 3.18), при этом
|
соответственно (см. рис. 3.18), при этом
|![]() |
= |
|
= |![]() |
= |
|
= |![]() |
= 1 и эти векторы попарно ортогональны,
т.е. образуют ортонормированный
базис пространства. Аналогично плоскому
случаю, для любого
|
= 1 и эти векторы попарно ортогональны,
т.е. образуют ортонормированный
базис пространства. Аналогично плоскому
случаю, для любого
![]() справедливо разложение
справедливо разложение
![]()
 =х
=х![]() +у
+у![]() +z
+z![]() ={х,у,z}, (3.4)
={х,у,z}, (3.4)
где
х, у, z
– координаты вектора
![]() в базисе из векторов
в базисе из векторов
![]() ,
,
![]() ,
,
![]() ,
при этом
,
при этом
х=ПРх![]() ,
у=ПРу
,
у=ПРу![]() ,
z=ПРz
,
z=ПРz![]() ,
|
,
|![]() |=
|=![]() .
.
Если
α, β, γ – углы, образованные вектором
![]() с соответствующими осями координат ,
то
с соответствующими осями координат ,
то
соs
α
=
![]() ,
соs
β
=
,
соs
β
=
![]() ,
соs
γ
=
,
соs
γ
=
![]() .
.
Числа
соs
α,
соs
β,
соs
γ
– направляющие
косинусы
вектора
![]() и
и
![]() .
.
3.6. Действия над векторами в координатной форме.
Рассмотрим
в пространстве ортонормированный базис
![]() ,
,
![]() ,
,
![]() .
Пусть далее
.
Пусть далее
![]() =х1
=х1![]() +у1
+у1![]() +z1
+z1![]() ,
,
![]() =х2
=х2![]() +у2
+у2![]() +z2
+z2![]() .
.
Сложение векторов: при сложении векторов их соответствующие координаты складываются , т.е.
![]() +
+![]() =(х1+х2)
=(х1+х2)![]() +(у1+у2)
+(у1+у2)![]() +(z1+z2)
+(z1+z2)![]() =
{х1+х2;
у1+у2;
z1+z2}
=
{х1+х2;
у1+у2;
z1+z2}
Действительно,
(![]() +
+![]() )х=ПРх(
)х=ПРх(![]() +
+![]() )
= ПРх
)
= ПРх![]() +
ПРу
+
ПРу
![]() = х1+х2.
= х1+х2.
Аналогично для остальных координат.
Умножение вектора на число: при умножении вектора на число координаты вектора умножаются на это число, т. е.
![]() .
.
Равенство
векторов:
два вектора
![]() = х1
= х1![]() +у1
+у1![]() +z1
+z1![]() и
и
![]() = х2
= х2![]() +у2
+у2![]() +z2
+z2![]() равны тогда и только тогда, когда равны
их соответствующие координаты: т.е. х1
= х2,
у1 =
у2,
z1
= z2.
равны тогда и только тогда, когда равны
их соответствующие координаты: т.е. х1
= х2,
у1 =
у2,
z1
= z2.
Коллинеарность
векторов:
![]() ||
||![]()
![]() =λ
=λ![]() ,
или в координатной форме
,
или в координатной форме
х1![]() +у1
+у1![]() +z1
+z1![]() =λ(х2
=λ(х2![]() +у2
+у2![]() +z2
+z2![]() )=(λх2)
)=(λх2)![]() +(λу2)
+(λу2)![]() +(λz2)
+(λz2)![]() ,
,
отсюда
х1=λх2,
у1=λу2, z1=λz2,
т.е.
![]() .
.
Вывод: коллинеарность векторов равносильна пропорциональности соответствующих координат этих векторов.
Координаты
вектора через координаты его начала и
конца: если
![]() =
=
![]() и известны к
и известны к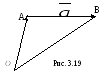 оординаты
точек А (х1;у1;z1)
и В (х2;у2;z2).
Тогда (см. рис. 3.19)
оординаты
точек А (х1;у1;z1)
и В (х2;у2;z2).
Тогда (см. рис. 3.19)
![]() =
=![]() –
–![]() ={х2;у2;z2}
– {х1;у1;z1}
= {х2-
х1;
у2-
у1;
z2-
z1}.
={х2;у2;z2}
– {х1;у1;z1}
= {х2-
х1;
у2-
у1;
z2-
z1}.
![]() =
{х2-
х1;
у2-
у1;
z2-
z1}.
=
{х2-
х1;
у2-
у1;
z2-
z1}.
Мы
воспользовались тем, что, если дана
точка М (х,у,z),
то вектор
![]() {х,у,z}
(см. рис. 22). Вектор
{х,у,z}
(см. рис. 22). Вектор
![]() называется радиусом–
вектором
точки М.
называется радиусом–
вектором
точки М.