

5. Устойчивость.
5.1. Определения устойчивости систем.
Решение
![]() для всехi
=1,n
называется устойчивым по Ляпунову
при t
,
если для любого действительного
для всехi
=1,n
называется устойчивым по Ляпунову
при t
,
если для любого действительного
![]() существует действительное число
существует действительное число![]() ,
зависящее от
,
зависящее от![]() ,
что любое решение
,
что любое решение![]() ,
для которого при
,
для которого при![]() выполняется неравенство
выполняется неравенство![]() ,
удовлетворяет неравенству
,
удовлетворяет неравенству![]() при
при![]() для всехi=1,n
.
для всехi=1,n
.
Г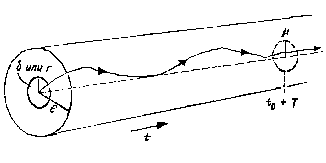 еометрически
это означает, что все решения , которые
при
еометрически
это означает, что все решения , которые
при![]() начинаются в
– окрестности точки (
начинаются в
– окрестности точки (![]() )
, никогда не покинут-
трубку решения.
)
, никогда не покинут-
трубку решения.
Состояние
равновесия 0
свободной системы называется устойчивым,
если для любого действительного
![]() ,
существует действительное число
,
существует действительное число![]() ,
такое что при норме
,
такое что при норме![]() выполняется неравенство
выполняется неравенство![]() .
.
Другими
словами, если состояние равновесия
устойчиво, то решение можно выбрать как
угодно малым по норме при соответствующем
выборе начального условия
![]() .
.
Более сильным является требование достижения в пределе положения равновесия.
Асимптотическая устойчивость
Состояние равновесия 0 свободной системы называется асимптотически устойчивым, если
оно является устойчивым,
2)
каждое движение, начинающееся достаточно
близко от 0
стремится к 0
при
![]() .
.
5.2. Первый метод ляпунова
Рассмотрим
свободную систему
![]() начало координат
начало координат![]() является
является
состоянием
равновесия, причем это состояние
единственное, если
![]() .
Общее решение уравнения имеет вид
.
Общее решение уравнения имеет вид![]() -
переходная матрица состояния системы.
-
переходная матрица состояния системы.
Необходимым и достаточным условием асимптотической устойчивости в начале координат стационарной свободной системы является требование: действительные части всех собственных значений матрицы А должны быть отрицательны.
Теорема.
Состояние равновесия
![]() системы
системы![]() асимптотически устойчиво, если состояние
равновесия
асимптотически устойчиво, если состояние
равновесия![]() соответствующей свободной линейной
стационарной системы
соответствующей свободной линейной
стационарной системы![]() ,
асимптотически устойчиво.
,
асимптотически устойчиво.
Существует также аналогичная теорема о неустойчивости.
Теорема.
Состояние равновесия
![]() системы
системы![]() неустойчиво, если состояние равновесия
неустойчиво, если состояние равновесия![]() соответствующей свободной линейной
стационарной системы
соответствующей свободной линейной
стационарной системы![]() ,
неустойчиво.
,
неустойчиво.
Пример 1. Рассмотрим свободную систему
![]() ,
0 является точкой равновесия.
,
0 является точкой равновесия.
Линеаризованная система имеет вид
![]() .
Получим характеристическое уравнение
.
Получим характеристическое уравнение
![]() .
.
Собственные числа матрицы А есть
![]() .
.
Если k>0 , то начало координат является асимптотически устойчивым положением равновесия для исходной системы, так как оно асимптотически устойчиво для линеаризованной системы. Если k<0 , то исходная система неустойчива.
Пример 2.
У равнение
колебаний незатухающего простого
маятника
равнение
колебаний незатухающего простого
маятника![]() .
.
Перейдя к системе уравнений первого порядка, получим уравнения состояния
![]()
где k – постоянная, зависящая от длины маятника ( k=g/l ).
Для этой системы начало координат является состоянием равновесия и соответствующая линейная система имеет вид
![]() .
.
Так
как собственные числа
![]() являются чисто мнимыми, первый метод
Ляпунова не дает информацию об
устойчивости состояния системы ( отметим,
что начало координат является устойчивым,
но не асимптотически устойчивым).
являются чисто мнимыми, первый метод
Ляпунова не дает информацию об
устойчивости состояния системы ( отметим,
что начало координат является устойчивым,
но не асимптотически устойчивым).
Теперь предположим, что имеется затухание колебаний вследствие трения. Тогда уравнение 2-го порядка имеет вид
![]() ,
,
с- коэффициент затухания.
При
![]() исходное уравнение представляется в
виде системы уравнений
исходное уравнение представляется в
виде системы уравнений
![]()
Начало координат является состоянием равновесия.
В результате линеаризации получаем
![]()
Так
как действительные части собственных
чисел
![]()
отрицательны, то начало координат является асимптотически устойчивым положением равновесия, а следовательно, и исследуемая нелинейная система имеет асимптотически устойчивое положение равновесия в начале координат.
ЛІТЕРАТУРА
1. Иванов В.А. Математические основы теории регулирования. Учебное пособие для втузов. М., Высшая школа, 1971.
2. Директор С., Рорер Р. Введение в теорию систем, изд - во «Мир», 1974.
3. Афанасьев В.Н., Колмановский В.Б., Носов В.Р. Математическая теория конструирования систем управления. М., Высшая школа, 1988.
4. Арнольд В. И. Обыкновенные дифференциальные уравнения, изд-во «Наука», М„ 1971.
5. Бахвалов Н. С. Численные методы (Анализ, алгебра, обыкновенные дифференциальные уравнения), изд-во «Наука», М., 1973.
6. Бусленко Н. П., Калашников В. В., Коваленко И. Н. Лекции по теории сложных систем, изд-во «Советское радио», М., 1973.
7 Демидович Б. П. Лекции по математической теории устойчивости, изд-во «Наука». М., 1967.
8 Зубов В. И. Методы А. М. Ляпунова и их применение, изд-во МГУ, 1957.
9. Калман Р., Фалб П., Арбиб М. Очерки по математической теории систем, изд-во «Мир», М., 1971.
10. Канторович М. И. Операционное исчисление и процессы в электрических полях, изд. 3-е, изд-во «Наука», М., 1964.
11. Колмогоров А. Н., Фомин С. В. Элементы теории функции и функционального анализа, изд. 3-е, изд-во «Наука», М., 1972.
12. Ройтенберг Я. Я. Автоматическое управление, изд-во «Наука», М., 1971.
Учебное издание