

3. Методы получения оптимальных решений злп
3.1. Графический метод решения злп
3.1.1. Алгоритм решения графическим методом
З
X![]() M
→ X
M
→ X
![]() M.
M.

а) б)
Рис. 3.1. Выпуклое (а) и невыпуклое (б) множества
Для выпуклых множеств, справедливо утверждение, что пересечение выпуклых множеств есть выпуклое множество. Если X1 (x11, x21), X2 (x12, x22), то для выпуклого множества справедливо:
![]()
Установлено, что выпуклый n-мерный многогранник является выпуклой линейной комбинацией своих угловых точек. В теории линейного программирования доказывается, что оптимальный план, если он существует, соответствует координатам одной из угловых точек выпуклой области определения D.
Исходя из этого, и учитывая, что любая полуплоскость есть выпуклое множество, алгоритм графического метода решения ЗЛП для двух переменных x1 и х2 состоит в следующем:
-
Записывается ЗЛП для двух переменных x1 и х2.
(3.1)![]()
(3.2)
(3.1)
![]()
![]() . (3.3)
. (3.3)
-
По ограничениям (3.2) и (3.3) строится множество всех допустимых решений D.
-
По целевой функции определяем градиент
 направления перемещения линии уровня
направления перемещения линии уровня
 = с1
х1
+ с2
х2,
которая перпендикулярна вектору
= с1
х1
+ с2
х2,
которая перпендикулярна вектору
 :
:
![]()
![]()
-
Перемещаем линию уровня параллельно самой себе в направлении вектора
 .
Первая точка встречи линии уровня с
областью D
соответствует точке min,
а последняя – точке max.
Если D
.
Первая точка встречи линии уровня с
областью D
соответствует точке min,
а последняя – точке max.
Если D
 Ø, то решений нет. Если линия уровня
параллельна одной из сторон области
допустимых решений D,
то экстремум достигается во всех точках
соответствующей стороны.
Ø, то решений нет. Если линия уровня
параллельна одной из сторон области
допустимых решений D,
то экстремум достигается во всех точках
соответствующей стороны.
Пример. 3.1. Задача о диете и смесях.
Область ограничения представляет собой неограниченную многоугольную область. Её границы представлены уравнениями прямых:


Рис. 3.2. Графическое решение задачи о диете и смесях
Определяем
α = 4х1 + 6х2,
и
![]() .
.
Перемещаем
![]() в направлении вектора
в направлении вектора
![]() и определяем, что точкой входа в область
допустимых решений является точка В,
координаты которой определяем из
условия:
и определяем, что точкой входа в область
допустимых решений является точка В,
координаты которой определяем из
условия:
Откуда х1В = 2; х2В = 3
![]()
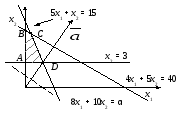
Пример 3.2. Задача об использовании ресурсов
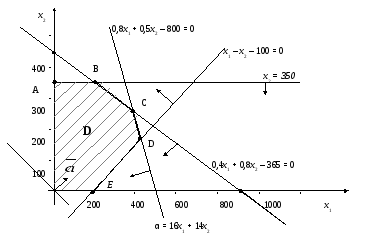
Рис. 3.3. Графическое решение задачи об использовании ресурсов
![]()
 С
(312,5; 300).
С
(312,5; 300).
![]()
Пример 3.3. Задача о банке

Рис. 3.4. Графическое решение задачи о банке
![]()
x1c = 70; x2c = 30.
![]() .
.
Если r1=18
%, r2=12
%, то
![]()
3.1.2. Особые случаи решения злп графическим методом
-
max f (x1, x2)= 3x1 + 5x2,

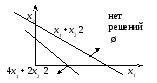
x1,2
![]() 0.
0.
Рис. 3.5 Случай отсутствия области решений D
2) max f (x1, x2)= 3x1 + 2x2,
x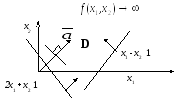 1,2
1,2
![]() 0.
0.
Рис. 3.6 Значение целевой функции не ограниченно возрастает
3) max f (x1, x2)= 8x1 + 10x2,

x1
![]() 0.
0.
Рис. 3.7. Случай неединственности оптимального решения
Неединственность решения: множество точек отрезка ВС (ВС׀׀α).