

6. Критерий симметричного оптимума
Для решения задачи синхронизации скоростей между отдельными машинами и агрегатами применяются астатические системы регулирования как по заданию, так и по нагрузке. Обычно объект управления состоит в этом случае из нескольких инерционных звеньев первого порядка и интегрирующего звена (рис. 57), на входе которого действует возмущающее воздействие (наброс нагрузки). Для получения астатизма как по заданию, так и по нагрузке в контур вводят ПИ-регулятор, а система становится двукратно интегрирующей.
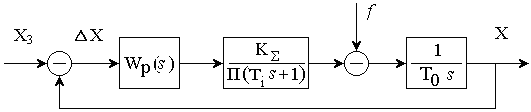
Рис. 57
Поэтому в дальнейшем будем рассматривать контуры, содержащие два интегральных звена или одно интегральное с постоянной времени То и одно инерционное звено с постоянной времени Тμ (То >> 4Tμ). По условиям структурной устойчивости замкнутой системы нельзя использовать ПИ-регулятор с настройкой Тμ = То, полностью компенсирующей единственную постоянную времени (получается идеальное колебательное звено).
Из уравнения
Wzam(s) = W(s)/[1 + W(s)]
следует, что передаточная функция замкнутого контура никогда не равна единице во всём спектре частот сигнала. Для того, чтобы АЧХ контура была как можно ближе к единице и более плоской, необходимо потребовать, чтобы как можно большее число производных dA2(w)/dwn ® 0 при w ® 0. Критерий симметричного оптимума требует такого выбора постоянной времени контурного регулятора, при котором выполняется это требование.
Рассмотрим систему, состоящую из ПИ-регулятора и объекта с передаточными функциями
Wp(s) = (Тi s + 1)/Тp s;
Wo(s) = 1/[Тo s(Тμ s + 1)], Тo = 1.
Передаточная функция замкнутой системы по заданию (возмущение равно нулю)
Wzamx(s) = (Тi s + 1) / (ТpТμ s3 + Тp s2 + Тi s + 1),
а по возмущению (задание равно нулю)
Wзамf(s) = Тp s(Тμ s + 1) / (ТpТμ s3 + Тp s2 + Тi s + 1).
Обе системы имеют одинаковые характеристические уравнения, поэтому переходные процессы характеризуются одинаковым демпфированием, т.е. одинаковым затуханием переходных процессов, хотя их переходные характеристики различаются.
Рассмотрим новую передаточную функцию, которая отличается от предыдущих только числителем: он равен единице. Квадрат её амплитудной частотной характеристики равен
А2(w) = 1/ [1 – w2(2Tp – Ti2) – w4(2ТpТμТi – Тp2) + Тp2 Тμ2 w6]
и является чётной функцией частоты. Потребуем равенства нулю чётных производных в соответствии с числом определяемых параметров (TI ,TP):
dA2(w)/dw2 = 0; dA2(w)/dw4 = 0.
Тогда
2Тp – Тi2 = 0; 2ТpТμТi – Тp2 = 0
и Тi = 4Тμ , Тp = 8Тμ2 .
Аналогичный результат получается, если потребовать, чтобы амплитудная частотная характеристика рассматриваемой системы соответствовала амплитудной частотной характеристике фильтра Баттерворта третьего порядка
А2Б(w) = 1 / [1 + (Tw)6].
При расчёте контура по условиям симметричного оптимума возмущающее воздействие принимают равным нулю. В этом случае передаточная функция контура при выбранных настройках получается в виде
WzamСО( s) = (4Тμ s + 1) / (8Тμ3 s3 + 8Тμ2 s2 + 4Тμ s + 1),
а разомкнутого контура
WrazCO (s) = (4Тμs + 1) / [8Тμ2 s2(Тμ s + 1)].
Время достижения первого установившегося значения равно 3,1Тm, а наличие в числителе передаточной функции контура форсирующего члена обуславливает большое перерегулирование (до 43 %) выходной величины при единичном изменении входного сигнала. Для устранения этого недостатка в цепь входного сигнала контура включают фильтр первого порядка (рис. 58) с передаточной функцией
Wф(s) = 1/ (Тф s + 1), Тф = 4Тμ.
При этом время регулирования возрастает примерно в 2,3 раза, а динамическая ошибка по возмущению уменьшается.

Рис. 58
Выбор настроек регулятора по критерию симметричного оптимума можно проводить с помощью нормированных полиномов Баттерворта. Для системы третьего порядка
АБСО(s) = s3 + 2аs2 + 2а2s + а3.
Приравнивая соответствующие коэффициенты нормированного и реального полиномов, находят параметры регулятора.
Рассмотрим систему, состоящую из ПИ-регулятора, апериодического звена первого порядка с постоянной времени Тμ и передаточным коэффициентом к, интегрирующим звеном с большой постоянной времени Т0 и звеном обратной связи кос. Характеристический полином замкнутого контура этой системы
Аз(s) = (Т0ТрТm/ккос)s3 + (Т0Тр/ккос)s2 + Ти s + 1.
Нормированный полином Баттерворта представим в виде
АБСО(s) = (1/а3)s3 + (2/а2)s2 + (2/а)s + 1.
По условиям симметричного оптимума требуется, чтобы Ти= 4Тm.
Из сопоставления коэффициентов при s и s2 полученного и нормированного полиномов получаем
4Тm = 2/а ; а = 0,5/Тm ; Т0Тр/ккос = 8Т2m и Тр = 8Т2mккос/Т0.
Передаточная функция разомкнутого контура
WРСО(s) = [Т0(4Тm s + 1)]/ [8Т2m s (Т0 s + 1)(Тm s + 1)].
Если Т0 >> 4Тm , то
WРСО(s) @ (4Тm s + 1)/ [8Т2m s2(Тm s + 1)].
При этом передаточные функции замкнутого контура по управляющему и возмущающему воздействиям соответственно будут
WЗАМСО(s) = (4Тm s + 1)/ [(2Тm s + 1)(4Т2m s2 + 2Тm s + 1)];
WВСО(s) = [8Т2m s(Тm s + 1)]/ [Т0(2Тm s + 1)(4Т2m s2 + 2Тm s + 1)].
Если рассматривать знаменатель как характеристическое уравнение звена второго порядка, то x = 0,5.
Логарифмическая амплитудная частотная характеристика разомкнутого контура имеет наклоны –40, –20, –40 и расположена симметрично относительно частоты среза (рис. 59), поэтому критерий и получил название симметричного оптимума.
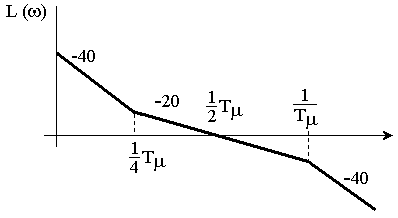
Рис. 59
Рассмотрим динамические свойства объекта в среде MATLAB+Simulink (рис. 60), если Т3 = 0,16 с.
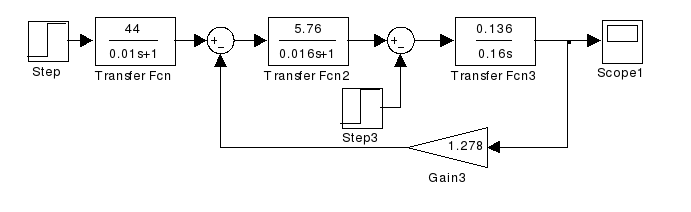
Рис. 60
>> w1=tf([44],[0.01 1])
Transfer function:
44
----------
0.01 s + 1
>> W2=tf([5.76],[0.016 1])
Transfer function:
5.76
-----------
0.016 s + 1
>> W3=tf([0.136],[0.16 0])
Transfer function:
0.136
------
0.16 s
>> Woc=tf([1.278])
Transfer function:
1.278
>> Wd=feedback(W2*W3,Woc,-1)
Transfer function:
0.7834
----------------------------
0.00256 s^2 + 0.16 s + 1.001
>> Wpd=w1*Wd
Transfer function:
34.47
--------------------------------------------
2.56e-005 s^3 + 0.00416 s^2 + 0.17 s + 1.001
>> step(44*Wd,Wpd) –рис. 61
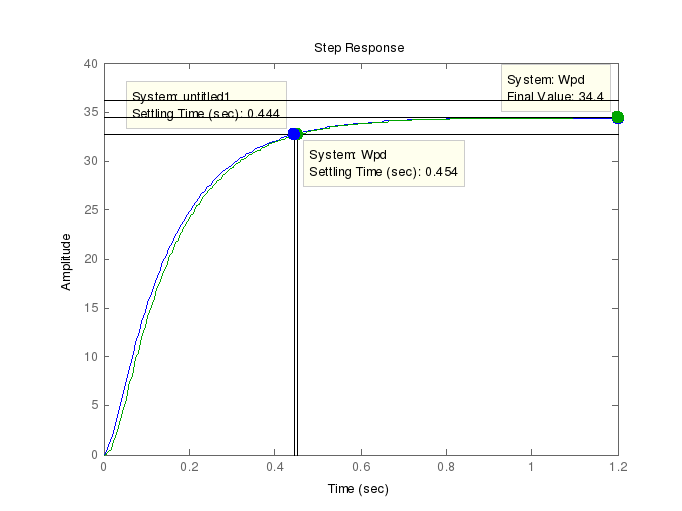
Рис. 61
При выбранных параметрах двигателя инерционность преобразователя не оказывает существенного влияния на динамику системы преобразователь-двигатель.
Для контура тока регулятор остается без изменений:
![]() ,
,
а передаточная функция замкнутой системы, настроенной по критерию МО
![]()
При анализе следующего контура считается, что
![]()
Условие Т0 = T3 = 0,16 >>Tμ=2T1=0,02 выполняется, на входе интегрирующего звена действует возмущение и основная задача системы - компенсировать это возмущение. Поэтому выбираем ПИ-регулятор с передаточной функцией
![]() ,
,
при этом TI = 4Tμ = 0.08 c. Постоянная регулятора ТР определяется по формуле
![]() ,
,
где kРАЗ – передаточный коэффициент разомкнутого контура. На рис. 62 представлены структурные схемы рассматриваемых систем, которые исследуем в MATLAB+Simulink:
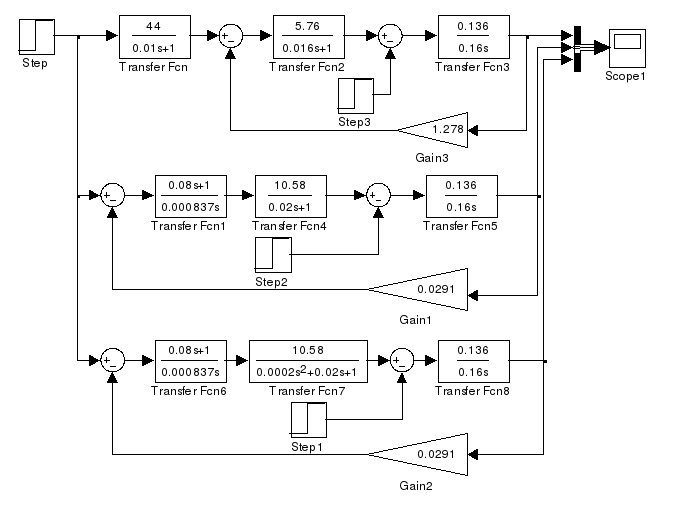
Рис. 62
>> W1=tf([44],[0.01 1])
Transfer function:
44
----------
0.01 s + 1
>> W2=tf([5.76],[0.016 1])
Transfer function:
5.76
-----------
0.016 s + 1
>> W3=tf([0.136],[0.16 0])
Transfer function:
0.136
------
0.16 s
>> Woc=tf([1.278])
Transfer function:
1.278
>> Wct=tf([0.016 1],[0.479 0])
Transfer function:
0.016 s + 1
-----------
0.479 s
>> Wcs=tf([0.08 1],[0.000837 0])
Transfer function:
0.08 s + 1
----------
0.000837 s
>> Wdt=0.0945
Wdt =
0.0945
>> Wds=0.0291
Wds =
0.0291
>> Wkt=tf([10.58],[0.0002 0.02 1]) - передаточная функция контура тока,
Transfer function: звено второго порядка
10.58
-----------------------
0.0002 s^2 + 0.02 s + 1
>> Wktk=tf([10.58],[0.02 1]) - передаточная функция контура тока,
Transfer function: звено первого порядка
10.58
----------
0.02 s + 1
>> Wz=feedback(Wcs*Wkt*W3,Wds,-1)
Transfer function:
0.1151 s + 1.439
---------------------------------------------------------------------
2.678e-008 s^4 + 2.678e-006 s^3 + 0.0001339 s^2 + 0.00335 s + 0.04187
>> Wzk=feedback(Wcs*Wktk*W3,Wds,-1)
Transfer function:
0.1151 s + 1.439
----------------------------------------------------
2.678e-006 s^3 + 0.0001339 s^2 + 0.00335 s + 0.04187
>> step(Wz,Wzk) – переходные процессы замкнутой системы управления
(кривая синего цвета – звено второго порядка; кривая
зелёного цвета – звено первого порядка) – рис. 63
>> margin(Wcs*Wkt*W3*Wds) – рис. 64 – диаграммы Боде
>> margin(Wcs*Wktk*W3*Wds) – рис. 65
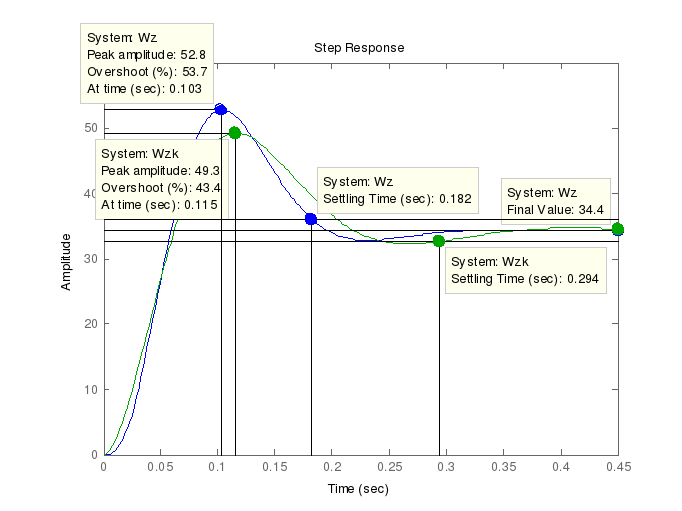
Рис. 63
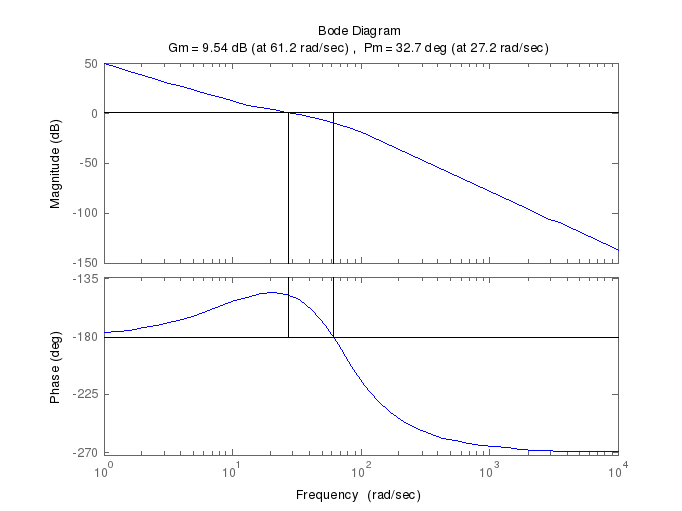
Рис. 64
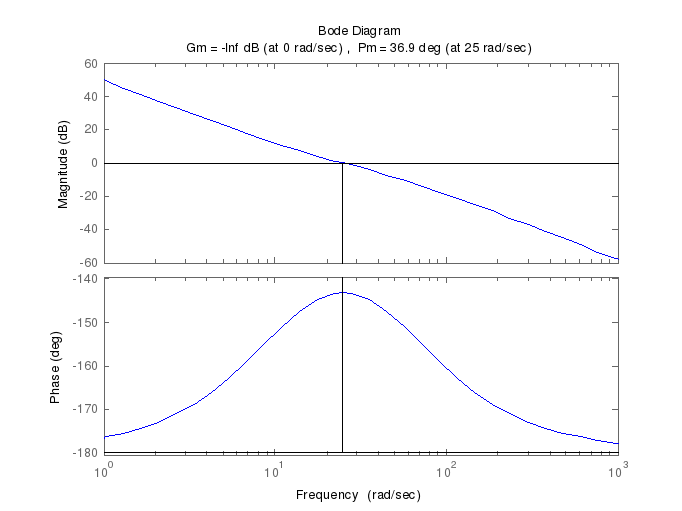
Рис. 65
При выбранных настройках система имеет большое перерегулирование, которое недопустимо для технических систем. Поэтому устанавливаем фильтр с передаточной функцией
![]()
и анализируем переходные процессы системы с фильтром:
>> Wf=tf([1],[0.08 1])
Transfer function:
1
----------
0.08 s + 1
>> step(Wf*Wz,Wf*Wzk) – переходные характеристики систем (рис.66).
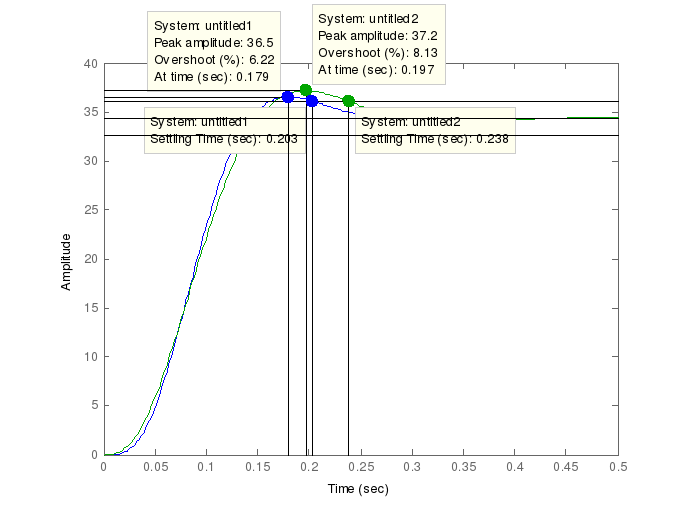
Рис. 66
Показатели качества рассматриваемых систем сведены в таблицу 1.
|
|
Время регулирования, с |
Перерегули-рование, % |
Запас по амплитуде, дБ |
Запас по фазе, град. |
|
Система без фильтра |
||||
|
Wz |
0,182 |
53,7 |
9,54 |
32,7 |
|
Wzk |
0,294 |
43,4 |
∞ |
36,9 |
|
Система с фильтром |
||||
|
Wz |
0,203 |
6,22 |
- |
- |
|
Wzk |
0,238 |
8,13 |
- |
- |
Очевидно, что система с фильтром имеет лучшие показатели качества.
Аналогичный результат можно получить и в Simulink (рис. 67 и 68).
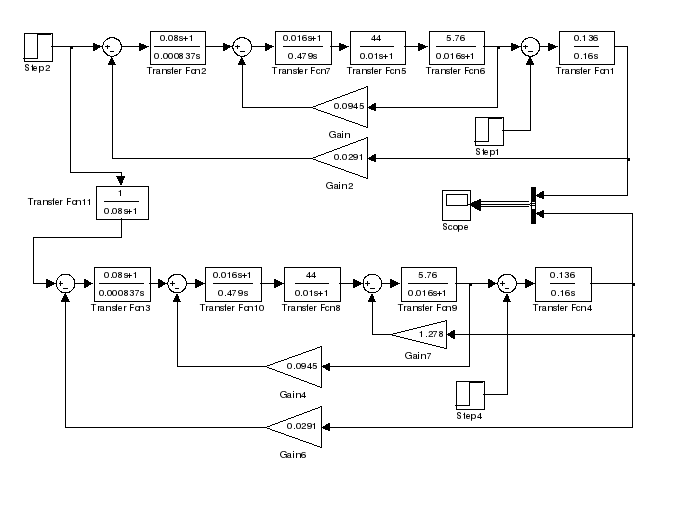
Рис. 67
Рис.68
Таким образом, рассматриваемые системы содержат два ПИ-регулятора и являются астатическими по заданию и нагрузке.
Анализируя настройки на МО и СО для одного и того же объекта, следует отметить, что первая настройка является оптимальной по быстродействию при управляющем воздействии, вторая настройка – при возмущающем воздействии, в особенности при больших значениях постоянной времени объекта Т0, например электромеханической постоянной времени привода. Вместе с тем настройка на ОМ дает в этих условиях при возмущающем воздействии затянутый переходный процесс, длительность которого пропорциональна Т0. Настройка на СО, в свою очередь, дает неблагоприятный переходный процесс при управлении по заданию. Кроме того, указанные настройки весьма чувствительны к изменению параметров объекта регулирования, в особенности настройка на СО, имеющая относительно небольшой запас устойчивости. В связи с изложенным возникает задача такой коррекции контура, при которой его динамические характеристики стали бы наилучшими как по управлению, так и по возмущению при малой чувствительности к вариации параметров объекта. Она решается с помощью критерия компромиссного оптимума [4], однако на практике этот критерий практически не применяется.