

2. Схемы включения корректирующих устройств
Рассмотрим наиболее распространённые структурные схемы включения корректирующих устройств [9-14, 21-25]. При последовательной коррекции (рис. 9) регулятор включается последовательно с объектом управления

Рис. 9
(системы с последовательной коррекцией). Передаточная функция разомкнутой системы
Wraz (s) = Wp(s) Wo (s);
передаточная функция замкнутой системы
![]() .
.
При встречно-параллельной коррекции корректирующее устройство включается в цепь обратной связи (рис. 10).

Рис. 10
Передаточная функция замкнутой системы
![]() .
.
Передаточные функции систем имеют одно и тоже характеристическое уравнение
![]() ,
,
следовательно, их динамические свойства одинаковы. Однако в предельном случае (k→∞) систему с последовательной коррекцией можно рассматривать как пропорциональное звено (Wzam (s)=1), а свойства системы с встречно-
параллельной коррекцией не зависят от характеристик объекта (Wzam(s)=1/Wp(s)) и определяются характеристикой регулятора.
На рис. 11 представлена схема комбинированной коррекции, которая дает наилучший результат при изменении как задания, так и нагрузки.
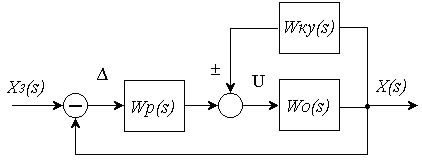
Рис. 11
Существуют и другие способы включения корректирующих устройств.
3. Типовые алгоритмы управления и типовые регуляторы
В качестве корректирующих устройств чаще всего применяются аналоговые и дискретные регуляторы следующих типов:
- пропорциональные (П) – реализуются при помощи усилителей (рис. 12)

Рис. 12
с передаточной функцией
Wp(s) = kР =kП;
управляющее воздействие таких регуляторов и в статике и в динамике пропорционально сигналу ошибки, они обладают высоким быстродействием и ограниченной точностью при управлении инерционными объектами; статическая ошибка обратно пропорциональна коэффициенту передачи; на рис. 13 представлена переходная характеристика регулятора (kП = 2), на рис. 14 - логарифмические амплитудная и фазовая характеристики (диаграмма Боде);

Рис. 13

Рис. 14
- интегральные (И) – реализуются с помощью звена (рис. 15)

Рис. 15
с передаточной функцией
Wp(s) = kI / s = kP /ТI s;
управляющее воздействие в каждый момент времени пропорционально интегралу от сигнала ошибки, обладает высокой точностью в установившемся режиме (при t → 0 kI → ∞), меньшим быстродействием и большей колебательностью; скорость перемещения вала исполнительного механизма (ИМ) пропорциональна величине отклонения регулируемого параметра от заданного; динамический параметр настройки регулятора kP численно равен величине скорости перемещения вала ИМ, приходящейся на единицу отклонения регулируемого параметра от заданного; постоянная ТI количественно характеризует скорость изменения выходной величины, приходящейся на единицу изменения входной величины, чем больше ТI, тем меньше изменение выходной величины в единицу времени; эту постоянную называют время удвоения или время изодрома; на рис. 16 и 17 показаны динамические характеристики такого регулятора при kP = 2 и TI = 0,5 c.

Рис. 16

Рис. 17
- пропорционально – интегральный (ПИ) – реализуется звеном (рис. 18)

Рис. 18
с передаточной функцией
Wp(s) = kп + kI /s = kР + kР /TI s = kP (TI s + 1)/ТI s;
обладает достоинствами и недостатками первых двух; время изодрома ТI – это время, за которое угол поворота вала ИМ под действием пропорциональной части удваивается интегральной частью, поэтому Тi называют временем удвоения; динамические характеристики регулятора представлены на рис. 19 и 20;

Рис. 19

Рис. 20
- пропорционально–дифференциальный (ПД) – реализуется звеном (рис. 21) с передаточной функцией
Wp(p) = kП + kd s = kP + kP Тd s;

Рис. 21
регулятор реагирует не только на величину сигнала ошибки, но и на скорость его изменения, благодаря этому достигается эффект упреждения; за время предварения Тd угол поворота вала ИМ под действием дифференцирующей части удваивается (это время, за которое входная величина, изменяясь с постоянной скоростью, достигает значения выходной величины). На рис. 22 представлена ЛФЧХ такого регулятора при kP = 2 и Td =0,5 c. Переходной процесс при единичном входном ступенчатом воздействии содержит дельта-функцию.

Рис. 22
Промышленные регуляторы реализуют операцию дифференцирования с помощью реального дифференцирующего звена (рис. 23), передаточная функция которого
![]() ,
N –
const, N = 3 - 10.
,
N –
const, N = 3 - 10.

Рис. 23
На рис. 24 и 25 представлены динамические характеристики такого регулятора при kP = 2, Td = 0.5 и N = 10.

Рис. 24

Рис. 25
- пропорционально-интегрально-дифференциальный (ПИД) – реализуется звеном (рис. 20) с передаточной функцией
Wp(s) = kП + kI /s + kd s = kP(1 + ТI s + TITd s2)/ТI s =
![]()
и обеспечивает наилучшие показатели качества переходных процессов; регу-
лятор может быть представлен как последовательное или параллельное соединение звеньев (рис. 26).
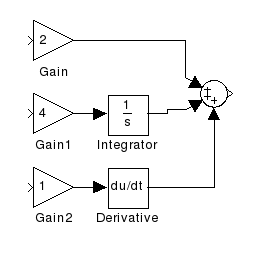
Рис. 26
Промышленный регулятор (рис. 27) имеет передаточную функцию
![]()
где N – обычно фиксируется проектировщиком в диапазоне 3 – 10. Его динамические характеристики представлены на рис. 28 и 29.

Рис. 27

Рис. 28

Рис. 29
Классические ПИ – и ПИД – регуляторы имеют различные структуры (рис. 30), которые могут быть использованы как в непрерывном, так и в дискретном случае. Структуры идеального и реального регуляторов представлены на рис. 30а, б и г.
Структуру ПИ – регулятора можно рассматривать как последовательное соединение форсирующего и интегрирующего звеньев. Такой регулятор обладает свойством упреждения: выходной сигнал сдвинут так, как будто интегрирование началось раньше входного сигнала на время изодрома. Последовательное соединение П – и И – регуляторов составляет структуру И – регулятора, но изменяет время интегрирования в kР раз. Параллельное соединение этих же регуляторов дает структуру ПИ – регулятора. Последовательное соединение ПД – и И – регуляторов порождает ПИ – регулятор, параллельное соединение этих же регуляторов порождает ПИД – регулятор. Последовательное и параллельное соединение ПИ – ПД – регуляторов порождает структуру ПИД – регуляторов, но с разными параметрами.
Регулятор структуры рис. 30г не даёт большого управляющего сигнала при скачкообразном изменении задающего воздействия.
Структура 30д даёт наилучший результат как при изменении задания, так и при изменении нагрузки (разница в параметрах регулятора минимальна, если он настроен по входному сигналу или по возмущениям процесса).
Регулятор с фильтром, передаточная функция которого
![]() ,
,
позволяет фильтровать все три части регулятора или только пропорциональную и дифференциальную части. В этом случае можно уменьшить высокочастотный шум измерений.

Рис. 30
Если фильтр нижних частот соединить последовательно с ПИ – регулятором (рис. 30е) или два ПИ – регулятора соединить каскадно, то получится структура, известная под названием ПИ2 – регулятор (PIPI controller). Такие регуляторы иногда используются в системах электропривода. Фильтр нижних частот ослабляет уровень высокочастотных сигналов и хорошо гасит резонансные колебания в системах механического привода. Передаточная функция регулятора
![]()
Значение ТФ1 обычно принимается равным резонансному периоду. ЛАЧХ регулятора представлена на рис. 31.

Рис. 31
Типовые регуляторы являются идеальными динамическими звеньями. Свойства реальных регуляторов могут значительно отличаться от идеальных и допустимые отклонения регламентированы стандартом на промышленные регуляторы.
Работа регуляторов и системы в целом оценивается показателями качества.