

5. Критерий модульного оптимума
Потребуем от системы, чтобы входной ступенчатый сигнал отрабатывался без ошибок с максимально допустимым быстродействием, причём перерегулирование не превышала 5%. С точки зрения возможно более точной отработки такого сигнала система должна иметь широкую полосу пропускания, но с точки зрения парирования возмущений полоса пропускания должна быть узкой, согласованной со спектром возмущений так, чтобы максимум этого спектра лежал вне полосы пропускания системы.
Амплитудная частотная характеристика (АЧХ) системы имеет, как правило, резонансный пик (рис. 35). Целесообразно увеличивать резонансную частоту w0, так как при этом возрастает полоса пропускания системы и, как следствие, уменьшается длительность переходного процесса.

Рис. 35
Критерий модульного (амплитудного, технического) оптимума МО обеспечивает выбор параметров регулятора на основании следующих требований к форме АЧХ замкнутой системы: характеристика в как можно более широком диапазоне частот должна быть горизонтальной и равной единице, наклонный участок характеристики должен быть как можно более крутопадающим. Другими словами, критерий МО требует, чтобы настраиваемая система приближалась по своим частотным свойствам к идеальному фильтру нижних частот, имеющему, как известно, прямоугольную частотную характеристику.
Наиболее близкую по форме к прямоугольной АЧХ имеет фильтр Баттерворта, у которого
АБ(w) = ôWБ(jw)ô= 1/sqrt[1 + (wT)2 n].
Нетрудно убедиться, что колебательное звено второго порядка
W(p) = 1/(T2s2 + 2xTs + 1)
при
коэффициенте демпфирования
![]() имеет АЧХ, соответствующую частному
случаю фильтра с n
= 2
имеет АЧХ, соответствующую частному
случаю фильтра с n
= 2
А(w) = к/sqrt(1 + T 4w 4).
Переходный процесс такого звена является оптимальным по длительности (имеет наименьшее время регулирования tp @ 3T), а максимальный выброс меньше 0,05к (или 0,05кА при А ¹ 1).
При оптимизации динамических свойств замкнутой системы управления по критерию МО обычно рассматривают контуры, содержащие два инерционных звена первого порядка или инерционное звено первого порядка и интегрирующее звено, при этом одна из постоянных должна быть больше другой. Малая постоянная обычно обозначается Тμ , большая – Т0 , следовательно, Т0 > Тμ .
На основании этого критерия выберем структуру и параметры регулятора для объекта управления в MATLAB+Simulink (рис. 36), если
![]()

Рис. 36
Предварительно с помощью MATLAB+Simulink [15-20] исследуем динамические свойства объекта управления, используя операторы tf([num],[den]), step(W), bode(W), margin(W) и feedback(W,Woc, -1):
>> W1=tf([44],[0.01 1])
Transfer function:
44
----------
0.01 s + 1
>> W2=tf([5.76],[0.016 1])
Transfer function:
5.76
-----------
0.016 s + 1
>> W3=tf([0.136],[0.041 0])
Transfer function:
0.136
-------
0.041 s
>> Woc=tf([1.278])
Transfer function:
1.278
>> Wd=feedback(W2*W3,Woc,-1)
Transfer function:
0.7834
------------------------------
0.000656 s^2 + 0.041 s + 1.001
>> Wpd=W1*Wd
Transfer function:
34.47
------------------------------------------------
6.56e-006 s^3 + 0.001066 s^2 + 0.05101 s + 1.001
>> step(44*Wd,Wpd) – переходные характеристики двигателя и системы преобразователь-двигатель (рис. 37)
>> margin(Wd) – логарифмические амплитудно-частотная (ЛАЧХ) и фазочастотная характеристики (ЛФЧХ) двигателя (диаграмма Боде) – рис. 38; с помощью этого оператора определяется логарифмический запас устойчивости по амплитуде (Gm, дБ) и фазе (Рm, градусы)
>> margin(Wpd) – ЛАЧХ и ЛФЧХ системы преобразователь-двигатель – рис. 39
>> bode(44*Wd,Wpd) – ЛАЧХ и ЛФЧХ двигателя и системы преобразователь двигатель – рис. 40.
Анализ этих графиков показывает, что объект устойчив, а по частотным свойствам это низкочастотный фильтр. Управление работой двигателя с помощью тиристорного преобразователя в разомкнутых системах ухудшает динамические свойства двигателя, поэтому на практике всегда применяют замкнутые системы управления и оптимизируют контур тока и контур скорости с помощью П- и ПИ-регуляторов.

Рис. 37

Рис. 38

Рис. 39

Рис. 40
Выполним
оптимизацию динамических свойств
последовательного соединения двух
апериодических звеньев первого порядка
(рис. 41). Потребуем, чтобы статическая
ошибка была равно нулю, перерегулирование
не превышало 5%, а быстродействие замкнутой
системы управления ограничивалось
малой постоянной времени Т1
< Т2
.
Следовательно, замкнутая система
управления должна соответствовать
колебательной модели второго порядка
при декременте затухания, равном
![]() .
.

Рис. 41
Поэтому выбираем ПИ-регулятор с передаточной функцией
![]() .
.
Пропорциональная часть обеспечит нужное быстродействие, а интегральная составляющая – нулевую статическую ошибку. Вводим также обратную связь по выходной координате (например датчик тока) с коэффициентом передачи kД =0,0945. Необходимо также компенсировать наибольшую постоянную времени, поэтому принимаем TI = T2 =0,016 c. Постоянную регулятора рассчитываем по формуле
TP = 2T1k1k2kД =2*0,01*44*5,76*0,0945 = 0,479 с.
Передаточная функция регулятора
![]() .
.
Структурная схема замкнутой системы управления в MATLAB+Simulink представлена на рис. 42.

Рис. 42
Исследуем замкнутую систему в MATLAB+Simulink:
>> W1=tf([44],[0.01 1])
Transfer function:
44
----------
0.01 s + 1
>> W2=tf([5.76],[0.016 1])
Transfer function:
5.76
-----------
0.016 s + 1
>> Wd=tf([0.0945])
Transfer function:
0.0945
>> Wp=tf([0.016 1],[0.479 0])
Transfer function:
0.016 s + 1
-----------
0.479 s
>> Wpaz=Wp*W1*W2*Wd – передаточная функция разомкнутой системы
Transfer function:
0.3832 s + 23.95
--------------------------------------
7.664e-005 s^3 + 0.01245 s^2 + 0.479 s
>> Wzam=feedback(Wp*W1*W2,Wd,-1) – передаточная функция замкнутой
системы
Transfer function:
4.055 s + 253.4
-----------------------------------------------
7.664e-005 s^3 + 0.01245 s^2 + 0.8622 s + 23.95
>> step(Wzam) – переходные функции объекта управления и замкнутой
системы управления (рис. 43)
>> margin(Wpaz) – диаграмма Боде разомкнутой системы (рис. 44)

Рис. 43
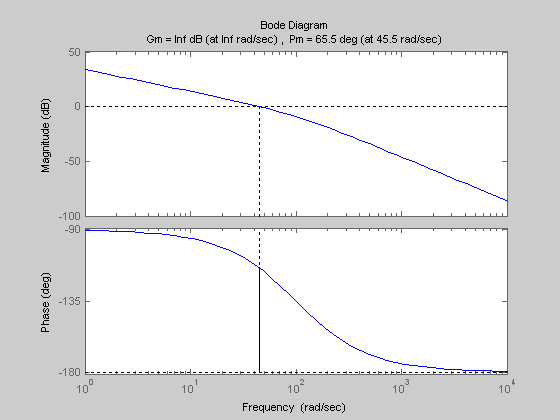
Рис. 44
При выбранных настройках быстродействие системы увеличилось с 0,0626 с. до 0,0414 с., запас устойчивости по амплитуде равен бесконечности, а запас устойчивости по фазе равен 65,5о. Она является также астатической по заданию. При этом передаточная функция замкнутой системы
![]()
При анализе следующего контура считается, что
![]()
Поэтому
рассмотрим объект, состоящий из
апериодического звена первого порядка
с удвоенной малой постоянной времени
Т![]() = 2Т1
= 0,02,
и интегрирующего звена с большей
постоянной времени
Т0
= Т2 = 0,041,
на входе которого действует возмущение
М (рис. 45).
= 2Т1
= 0,02,
и интегрирующего звена с большей
постоянной времени
Т0
= Т2 = 0,041,
на входе которого действует возмущение
М (рис. 45).

Рис. 45
Требования к замкнутой системе прежние. Для их удовлетворения необходим пропорциональный регулятор, так как интегральная составляющая есть в объекте, и жесткая отрицательная обратная связь kOC по выходной координате, значение которой принимаем равной 0,0291. Коэффициент передачи регулятора kP рассчитывается по формуле

На рис. 46 приведена структурная схема замкнутой системы управления в MATLAB+Simulink.

Рис. 46
Исследуем динамические характеристики системы в MATLAB:
>> Wp=24.48
Wp =
24.4800
>> W3=tf([0.136],[0.041 0])
Transfer function:
0.136
-------
0.041 s
>> W12=tf([10.582],[0.02 1])
Transfer function:
10.58
----------
0.02 s + 1
>> Wd=0.0291
Wd =
0.0291
>> Wzam=feedback(Wp*W12*W3,Wd,-1)
Transfer function:
35.23
-----------------------------
0.00082 s^2 + 0.041 s + 1.025
>> step(Wzam) – рис. 47
>> margin(Wp*W12*W3*Wd) – рис. 48
Система с регулятором имеет те же показатели качества, что и рассмотренная ранее, при изменении задания.
Аппроксимация замкнутой системы управления апериодическим звеном первого порядка с удвоенной малой постоянной времени вносит погрешность при выборе регулятора.

Рис. 47

Рис. 48
Поэтому исследуем свойства замкнутой системы с звеном второго порядка (рис. 49):

Рис. 49
>> w12r=tf([10.582],[0.0002 0.02 1])
Transfer function:
10.58
-----------------------
0.0002 s^2 + 0.02 s + 1
>> wzr=feedback(wp*w12r*w3,wd,-1)
Transfer function:
35.23
--------------------------------------------
8.2e-006 s^3 + 0.00082 s^2 + 0.041 s + 1.025
Анализ переходной функции позволяет сделать вывод, что система не обладает заданными показателями качества: перерегулирование 8.15% , что больше 5%; время переходного процесса 0,119 с. Уменьшим коэффициент передачи пропорционального регулятора до 22:
wp=tf([22])
Transfer function:
22
>> wzrk=feedback(wp*w12r*w3,wd,-1)
Transfer function:
31.66
---------------------------------------------
8.2e-006 s^3 + 0.00082 s^2 + 0.041 s + 0.9213
>> step(wz,wzr,wzrk) – рис.50
>> margin(wp*w12r*w3*wd) – рис. 51
Результат получается вполне удовлетворительным (рис. 50): перерегулирование уменьшилось до 4,39%, а время переходного процесса – до 0,078 с. Логарифмический запас устойчивости по амплитуде ∆L(Gm) = 12 дБ,
запас устойчивости по фазе ∆φ (Pm) = 60,5o (рис. 51). Аналогичный результат можно получить и в Simulink с помощью структурной схемы (рис. 52). На рис. 53 показан переходный процесс системы управления при изменении задания (Step2) и возмущения (Step1). Очевидно, что система является астатической по заданию и статической по нагрузке.

Рис. 50

Рис. 51

Рис. 52

Рис. 53
Во всех рассмотренных случаях мы не учитывали обратную связь по ЭДС и инерционность датчиков. Действие ЭДС приводит к уменьшению установившегося значения тока за счёт приобретения контуром статических свойств, к возрастанию колебательности, перерегулирования и замедления в изменении скорости вращения двигателя. Однако максимум тока в результате снижения его установившегося значения уменьшается. Перерегулирование зависит от соотношения постоянных времени ТЯ / ТМ , ТП /ТМ и увеличивается с уменьшением этих отношений. Следует отметить, что влияние ЭДС в контуре тока частично компенсируется действием контура скорости. Полная компенсация влияния ЭДС может быть достигнута при использовании ПИ – регулятора второго порядка, практическая реализация которого затруднена. В то же время в режимах изменения нагрузки ЭДС оказывает демпфирующее действие, снижая колебательность и перерегулирование в кривой тока.
Исследуем влияние внутренней обратной связи (рис. 54) на динамические свойства системы в MATLAB+Simulink при условии, что возмущение равно нулю:
>> W1=tf([44],[0.01 1])
Transfer function:
44
----------
0.01 s + 1

Рис. 54
>> W2=tf([5.76],[0.016 1])
Transfer function:
5.76
-----------
0.016 s + 1
>> W3=tf([0.136],[0.041 0])
Transfer function:
0.136
-------
0.041 s
>> Koc=1.278
Koc =
1.2780
>> Kdt=0.0945
Kdt =
0.0945
>> Kdc=0.0291
Kdc =
0.0291
>> Krck=22 – скорректированный П-регулятор
Krck =
22
>>Wrt=tf([0.016 1],[0.479 0])
Transfer function:
0.016 s+1
-------------
0.479s
Перенесём точку съёма сигнала через звено W3(s)
>> W=tf([0.041 0],[0.136])
Transfer function:
0.041 s
-------
0.136
>> W=0.0945*W
Transfer function:
0.003875 s
----------
0.136
>> Wk1=feedback(Wrt*Wpd,W,-1)
Transfer function:
0.075 s + 4.688
--------------------------------------------------------
4.273e-007 s^4 + 6.944e-005 s^3 + 0.00546 s^2 + 0.1988 s
Передаточная функция замкнутой системы управления с учётом обратной связи по ЭДС
>> Wz=feedback(Krck*Wk1,Kdc,-1)
Transfer function:
1.65 s + 103.1
----------------------------------------------------------------
4.273e-007 s^4 + 6.944e-005 s^3 + 0.00546 s^2 + 0.2468 s + 3.001
Переходный процесс системы с учётом обратной связи по ЭДС показан на рис. 55 (кривая зелёного цвета). Очевидно, что он не соответствует заданным показателям качества. Поэтому необходимо рассмотреть одноконтурную систему управления с ПИД-регулятором, передаточная функция которого
![]() .
.
В соответствии с критерием МО рекомендуется принять TI = To = T3 = 0.041 c; TD = Tμ = T2 = 0.016 c, а коэффициент передачи
Кr =То/(2*T1*k1*k)=0,041/(2*0.01*44*0.0291)=1.6.
>> Wpid=tf([0.000656 0.041 1],[0.041 0])
Transfer function:
0.000656 s^2 + 0.041 s + 1
--------------------------
0.041 s
>> Kr=1.6
Kr =
1.6000
>> Wzpid=feedback(Wpid*Wpd,Kdc,-1)
Transfer function:
0.02261 s^2 + 1.413 s + 34.47
-----------------------------------------------------------------
2.69e-007 s^4 + 4.371e-005 s^3 + 0.002749 s^2 + 0.08217 s + 1.003
Передаточная функция замкнутой сисиемы с ПИД-регулятором
>> Wzpid=feedback(Kr*Wpid*Wpd,Kdc,-1)
Transfer function:
0.03618 s^2 + 2.261 s + 55.15
----------------------------------------------------------------
2.69e-007 s^4 + 4.371e-005 s^3 + 0.003144 s^2 + 0.1068 s + 1.605
>> step(Wkss,Wz,Wzpid) – рис. 55
На этом рисунке красная кривая – переходный процесс замкнутой системы с ПИД-регулятором, голубая кривая – переходный процесс в двухконтурной системе без учёта обратной связи по ЭДС. Система с ПИД-регулятором имеет наилучшие показатели качества – запас устойчивости по амплитуде равен бесконечности, запас устойчивости по фазе – 69,9о (рис. 56), время переходного процесса – 0,0541с.

Рис. 55
>>bode(Wkss,Wz,Wzpid) –рис. 56
На последнем рисунке представлены диаграммы Боде для рассмотренных систем.

Рис. 56
Таким образом, обратная связь по ЭДС может существенно влиять на структуру и параметры регулятора при их выборе по критерию МО.
В общем случае объект регулирования может быть более сложным, чем в рассмотренных примерах (т.е. содержать несколько инерционных, форсирующих, интегрирующих и других звеньев). Их компенсация осуществляется более сложным регулятором. Принцип компенсации состоит в том, что каждому звену объекта регулирования должно соответствовать звено с обратной передаточной функцией в составе регулятора.
Разомкнутый контур, настроенный на технический оптимум, должен иметь передаточную функцию
![]() ,
,
где ам = 2 – стандартный коэффициент настройки. Оптимальное соотношение постоянных времени не есть понятие абсолютное, так как оно определяется не только быстродействием, но и зависит от допустимой по условиям технологического процесса величины перерегулирования. На практике этот коэффициент берётся в диапазоне 0,5 ≤ ам ≤ 4. Уменьшение значения ам по сравнению со стандартным снижает запас по фазе и, следовательно, повышает перерегулирование. Например, при ам = 1 (квадратичный оптимум) запас по фазе ∆φ = 45о, время переходного процесса уменьшается, а перерегулирование возрастает. При ам = 4 имеем пограничный апериодический режим, запас по фазе ∆φ = 81о, время переходного процесса увеличивается до 16Тμ.
Оптимальный характер переходных процессов при воздействии как со стороны задания, так и со стороны нагрузки будет получен, если ввести компенсирующую положительную обратную связь, действие которой на переходные процессы было бы одинаково и встречно действию внутренней обратной связи по ЭДС.
Датчики тока, скорости и другие являются инерционными элементами со своими постоянными времени. Если сам датчик может считаться без инерционным, то, как правило, последовательно с ним включается фильтр для исключения высокочастотных помех (коллекторных и оборотных пульсаций тахогенератора, пульсаций на выходе датчика тока и т.д.). При этом наибольшие трудности возникают при компенсации помех, которые соответствуют Тμ и появляются со стороны исполнительного механизма. Для расширения полосы пропускания в этом случае может быть использован квадратичный оптимум ( а = 1 ) или статический оптимум ( а = 0,5 ). Система при этом становится более колебательной, запас по фазе уменьшается до 45о – 35о и необходимо вводить на входе задатчика интенсивности демпфирующее звено с постоянной времени, близкой к Тμ. Учёт постоянных времени измерительных цепей осложняет расчёты. Обычно эти постоянные относят к малым постоянным и используют в расчётах их суммарное эквивалентное значение. Однако это не корректно, т. к. эти постоянные принадлежат не к основной цепи, а к цепям обратной связи.