

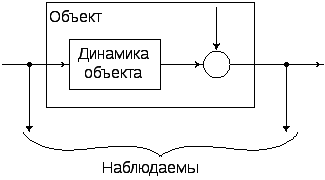
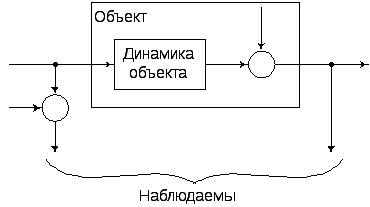
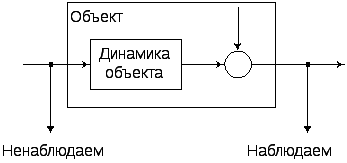
В6. Принципы построения идентификационных схем
Несколько простых примеров возможных
идентификационных схем представлено
на рис 9, где
![]() и
и
![]() - входной и выходной сигналы объекта
соответственно;
- входной и выходной сигналы объекта
соответственно;
![]() и
и
![]() - входной и выходной шумы.
- входной и выходной шумы.
Проблема идентификации (оценивания)
существенно осложняется многосвязностью
(многомерностью) объекта: в этом
случае входные и выходные сигналы
являются векторными переменными
![]() и
и
![]() .
Другая тонкость связана с тем, что шум
может быть не только аддитивным, но и
мультикативным.
.
Другая тонкость связана с тем, что шум
может быть не только аддитивным, но и
мультикативным.
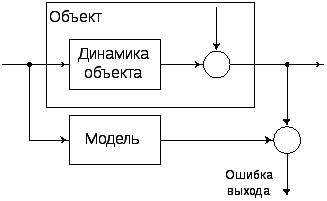
Как уже говорилось, задаче оценивания можно дать следующее математическое описание. На объект и модель действует один и тот же входной сигнал. Сравниваются искаженный помехой выходной сигнал объекта и выходной сигнал модели. Необходимо определить оптимальный в заданном смысле способ корректирования модели. Значения параметров непосредственному наблюдению не доступны. Таким образом, критерием выбора оптимума должен быть функционал от выходных сигналов или от математического ожидания ошибок оценок параметров.
|
|
|
|
а)
|
б) |
|
|
|
|
в)
|
|
|
Рис. 9. Примеры идентификационных схем |
|
Часто критерий параметрической идентификации записывается как функционал ошибки, например
![]() ,
,
где
![]() - выход объекта;
- выход объекта;
![]() -
выход модели;
-
выход модели;
![]() - ошибка;
- ошибка;
![]() ,
,
![]() ,
,
![]() - рассматриваются как функции, определённые
на интервале
- рассматриваются как функции, определённые
на интервале
![]() .
Этот критерий можно интерпретировать
как критерий наименьших квадратов для
ошибки
.
Этот критерий можно интерпретировать
как критерий наименьших квадратов для
ошибки
![]() .
.
Будем говорить, что рассматривается выходная ошибка, если
![]() ,
,
где
![]() -
выходной сигнал модели, на вход которой
подаётся сигнал
-
выходной сигнал модели, на вход которой
подаётся сигнал
![]() .
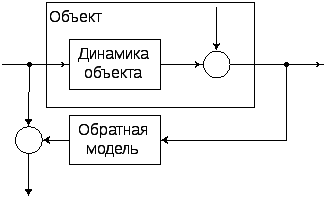
Это определение соответствует структуре,
изображённой на рис 10, а, где
единственной помехой является белый
шум измерений выходного сигнала
.
Это определение соответствует структуре,
изображённой на рис 10, а, где
единственной помехой является белый
шум измерений выходного сигнала
![]() .
.
Если
![]() ,
,
где
![]() -
входной сигнал модели;
-
входной сигнал модели;
![]() -
выходной сигнал модели; тогда говорят,
что
-
выходной сигнал модели; тогда говорят,
что
![]() -
входная ошибка (рис. 10 б).
-
входная ошибка (рис. 10 б).
Обозначение
![]() предполагает, что модель обратима, то
есть для заданного выхода всегда
можно найти единственный входной
сигнал. С точки зрения теории оценивания
использование входной ошибки правомерно
тогда, когда помехи представляют собой
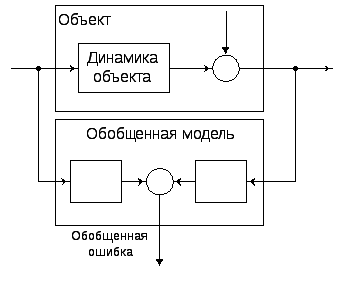
белый шум на входе системы. В общем
случае ошибку можно определить как:
предполагает, что модель обратима, то
есть для заданного выхода всегда
можно найти единственный входной
сигнал. С точки зрения теории оценивания
использование входной ошибки правомерно
тогда, когда помехи представляют собой
белый шум на входе системы. В общем
случае ошибку можно определить как:
![]() ,
,
где
![]() - обратная модель.
- обратная модель.
Этот тип модели и ошибки будем называть обобщенными (рис. 10 в).
|
|
|
|
а) |
б) |
|
|
Рис. 10 |
|
в) |
Другой тип задачи идентификации получается при условии, когда решаемая задача является частью семейства вероятностных задач. Такая постановка делает возможным использование теории оценивания и теории принятия решений для нахождения параметров системы. В частности, можно использовать метод максимального правдоподобия, бейесовские методы, минимаксные методы.
Теория оценивания связана со статистической теорией оптимальных систем. Фельдбаум рассмотрел ситуацию, когда управляющее воздействие используется в двух целях:
-
для обучения или изучения характеристик объекта или способов управления объектом;
-
для повышения качества управления, приведения объекта в требуемое состояние.
Такое сочетание изучения и управления Фельдбаум предложил назвать дуальным управлением. Согласно разработанной им теории, в системах дуального управления возникает противоречие между двумя сторонами управляющего воздействия: изучающей и направляющей. Действительно, успешное управление возможно лишь при своевременном воздействии на объект. Однако, успешно управлять можно, лишь достаточно хорошо зная свойства объекта, а для этого необходимо много времени. Преждевременное или запоздалое управление может оказаться неуспешным. Задача оптимизации заключается в наивыгоднейшем сочетании изучения и управления. Принятое решение об определенной в соответствии с заданным критерием величине управления должно учитывать два фактора:
а) потерю, происходящую в значении критерия качества вследствие того, что результат воздействия как в данный момент, так и в последующие вызовет отклонение объекта от требуемого или наилучшего возможного режима; среднюю меру потери называют риском действия;
б) потерю, происходящую в значении критерия качества вследствие того, что значение управляющего воздействия в данный момент оказалось не наилучшим для получения информации о характеристиках объекта, в связи с чем последующие воздействия также оказываются не наилучшими из возможных; среднюю меру такой потери называют риском изучения.