

5.2 Аналоговые фильтры
Аналоговые средства позволяют осуществлять фильтрацию шумов с широкой
полосой частот > s = /T0 . Низкочастотные фильтры, стоящие перед квантовате-
лем, должны при частоте =s =0/2 обеспечивать значительное ослабление
порядка 1/10-1/100, или -20 - -40дб в зависимости от спектрального сосава шума.
Простейшие низкочастотные фильтры формируются путем последовательного
соединения одинаковых апериодических звеньев:
(ф.283)
![]() n=1,2,3,...
n=1,2,3,...
где
![]() - нормированная частота.
- нормированная частота.
Величину
![]() называют частотой среза.
называют частотой среза.
В теории фильтрации нормированную частоту обычно связывают с граничной
частотой G , на которой амплитудная характеристика падает до -3дб=-0.708.
В этом случае
![]() ,
,
(ф.284)
![]()
где = g . Суммарная постонная времени такого фильтра зависит от его
порядка n.
ЛАХ НЧ-фильтров n=4
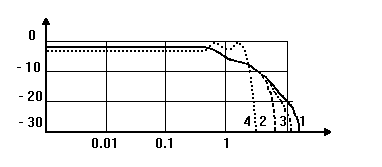
g
(рис.37)
1-простейший фильтр (ф.284)
2-фильтр Баттерворта
3-фильтр Бесселя
4-фильтр Чебышева
При выборе структуры НЧ-фильтра должны учитываться следующие противо-
речивые требования:
- горизонтальность частотной характеристики в полосе пропускания,
- падение на частотах выше частоты среза,
- минимальное перерегулирование в реакции фильтра на ступенчатый вход-
ной сигнал.
К НЧ-фильтрам относятся:
-фильтр Баттерворта
-фильтр Бесселя
-фильтр Чебышева
Вид ПФ:
(ф.285)
![]()
Амплитудная характеристика:
(ф.286)

Фазовая характеристика:
(ф.287)

Фильтр Баттерворта:
(ф.288)
![]()
Достоинства:
1) горизонтальность графика АХ на протяжении почти всей полосы пропускания
2) быстрая сходимость к асимптоте GF = 1/gn
Недостаток:
Существенное перерегулирование (n = 4 12%)
Фильтр Бесселя:
(ф.289)
![]()
Запаздывание, обусловленное таким сдвигом
(ф.290)
![]()
и не зависит от частоты.
Благодаря этому , реакция на ступеньку имеет малое перерегулирование.
В тоже время ЛАХ сходится к асимптоте 1/gn не столь быстро, как у фильтра
Баттерворта.
Фильтр Чебышева:
(ф.291)
![]()
где q=g
S1(q)=0
S2(q)=2q2 - 1
S3(q)=4q3 - 3q
Значительные колебания характеристики в области частот < g и большое
перерегулирование в реакции на ступенчатый сигнал.
Описанные фильтры специальных типов имеют комплексно-сопряженные полюсы.
Их реализуют на активных элементах (операционных усилителях) и пассивных
RC-цепях. Фильтры на пассивных элементах более дешевы и могут использовать-
ся при работе на достаточно высоких частотах порядка fg > 5Гц (g > 31.4c1)