

4.11. Регуляторы состояния с конечным временем установления.
Объект управления порядка m
(ф.254) x(k+1) = Ax(k)+bu(k)
Этот объект может быть переведен из произвольного начального состояния x(0)
в нулевое конечное x(N)=0 за N=m шагов.
Пусть
(ф.255) u(k) = - Kx(k)
тогда
(ф.256) x(k+1) = [A - Bk]x(k)=Rx(k)
или
(ф.257) x(1) = Rx(0)
x(2) = R2x(0)
..............
x(N) = RNx(0)
так как x(N) = 0 RN = 0
Характеристическое уравнение
(ф.259) det [zE - R] = m+m1z+...+1zm1+zm = 0
Из теоремы Кели-Гамильтона следует
(ф.260) mE+m1R+...+1Rm1+Rm = 0
Уравнение (ф.258) выполняется
(ф.261)
тогда характеристическое уравнение имеет вид
(ф.262) det [zE - R] = zm = 0
Наличие кретного полюса порядка m в точке z=0 являет признакомся системы с
конечным временем установления.
Апериодический регулятор можно получить задавая ki=- ai то есть
(ф.263) u(k) = [am am1 ... a1 ]x(k)
4.12. Наблюдатели состояния.
Поскольку все переменные состояния x(k) не могут быть непосредственно
измерены, их следует определять с использованием измеряемых велечин.
Пусть объект
(ф.264) x(k+1) = Ax(k)+Bu(k)
(ф.265) y(k) = Cx(k)
Могут быть измерены только u(k) и y(k), а x(k) - наблюдаемы.
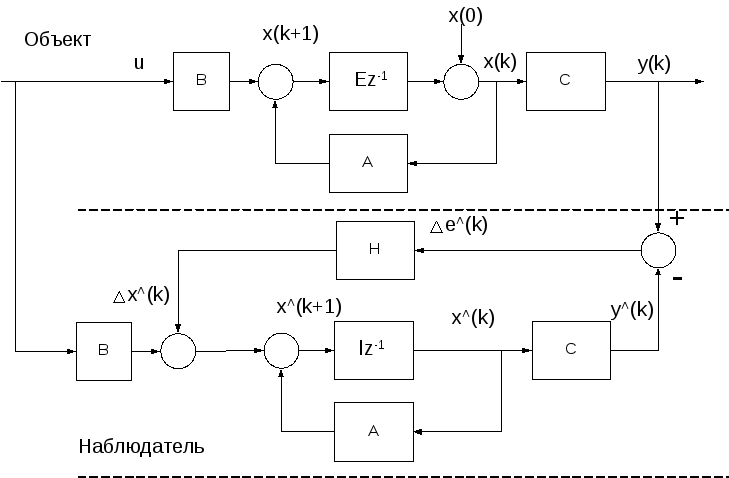
(рис.33)
Наблюдатель Льюинбергера.
Когда процесс сойдется, состояния модуля будут повторять состояния объекта.
Если используется полная модуль объекта, то наблюдатель называется эквива-
лентным.
Матрица Н должна выбираться так, чтобы вектор x^(k) асимптомически сходился
к x(k) при k
Уравнение наблюдателя:
(ф.266) x^(k+1) = Ax^(k)+Bu(k)+He(k) = Ax^(k)+Bu(k)+H[y(k) - Cx^(k)]
Ошибкa состояния
(ф.268)
![]() (k+1)
= x(k+1) - x^(k+1)
(k+1)
= x(k+1) - x^(k+1)
(ф.269)
![]() (k+1)
= [A - HC]
(k+1)
= [A - HC]
![]() (k)
(k)
Для сходимости процесса необходимо
(ф.270)
![]()
то есть (ф.269) должна описывать асимптотически устойчивый процесс.
(ф.271) det [zE - A+HC] = m+m1z+...+zm=0
должен иметь корни внутри единичного круга нa Z
Условие выполняется при соответствующем выборе Н .
Способы определения матрицы н.
а) Определение характеристического уравнения в соответствии с методами синте-
за регулятора состояния с заданным характеристическим уравнением.
Уравнение наблюдателя:
(ф.272) x^(k+1) = [A - hcT]x^(k)+bu(k)+hy(k)
Каноническая форма наблюдаемости:
(ф.273)
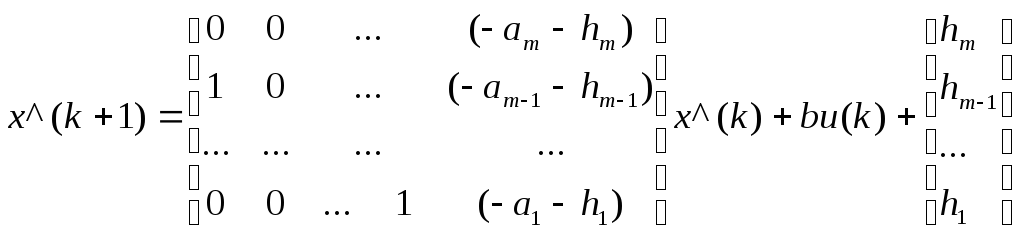
(ф.274) hi = i - ai ; i = 1, ..., m
где i - желательные коэффициенты характеристического уравнения.
б) Конечное время установления
Задав hi = -ai , получаем регулятор с минимальным конечным временем установле-
ния, обладающим апериодическим характером переходных процессов.
в) Минимизация квадратичного критерия качества
(ф.275)
![]()
Рекуррентные уравнения
(ф.276)

При практической реализации наблюдателей наличие шумов, присутствующих в
выходной переменной, ограничивает теоретически достижимое время установле-
ния переходных процессов.