

1.7 Построение графика приведенного момента инерции
В основу метода приведения масс положено условие равенства кинетической энергии всех звеньев механизма и звена динамической модели.
Для
определения приведенного момента
инерции
![]() каждого звена механизма необходимо
составить равенство кинетических
энергий рассматриваемого звена и звена
модели.
каждого звена механизма необходимо
составить равенство кинетических
энергий рассматриваемого звена и звена
модели.
Суммарный приведенный момент инерции всего механизма равен сумме приведенных моментов инерции всех его звеньев и зависит от положения механизма:

Используя исходные данные и полученные значения передаточных функций и передаточных отношений, вычисляем значения приведенных моментов инерций каждого вена в зависимости от угла поворота начального звена.
Звено
5 совершает вращательное движение:
![]()
Делается
допущение, что заготовка 7 совершает
поступательное движение:
![]()
Суммарный
момент инерции:
![]()
![]()
Приведенный момент инерции звена 7:
![]()
Приведенный момент инерции звена 5:
![]()
Суммарный приведенный момент инерции:
![]() (1.24)
(1.24)
Приложение № 5
Моделирование расчета кинематики и динамики компрессора
2. Кинематический расчет.

Уравнение
замкнутости контура: l1
+l2
=
![]() ,
где
,
где
![]() (0;1)
единичный вектор. Проекция уравнения
замкнутости на ось X:
(0;1)
единичный вектор. Проекция уравнения
замкнутости на ось X:
l1cos(φ1) + l2cos(φ 2) = Sc. Проекция уравнения замкнутости на ось Y:
l1sin(φ 1)+l2sin(φ 2)=0.
2.1 Задача о положениях.
Из проекции уравнения замкнутости на ось Y находим:
sin φ 2 = -λ,sinφ1
Угол φ1 характеризует положение кривошипа относительно оси х. Угол φ2, характеризует положение шатуна относительно оси х.
cos
φ
2
=
![]() .
.
Так как угол φ 2 относительно оси X всегда находится в первой или четвертой четвертях окружности, то со8 φ 2 всегда положителен.
2.2 Задача о скорости.
-l,sin(φ1)-l2sin(φ2) φ‘ 2 = SC.
1,С0S(φ 1)+12С0S(φ 2) φ‘2 =0.
2.3 Задача об ускорении.
-l1 cos(φ 1)-l2 С0S(φ 2)( φ ‘2)2 -12 sin (φ "2) φ2 = S``c
—l1 sin(φ1)-12 sin(φ 2)(φ2)2 +12 соs(φ 2)φ"2 = 0.
2.4 Определение координат центров масс звеньев, проекции аналога скоростей и аналога ускорений цетров масс звеньев.
2.4.1 Кривошип. Координаты точки Si:
![]() .
Проекции
аналога скорости точки Si:
.
Проекции
аналога скорости точки Si:
![]()
Проекция аналога ускорения точки Si:
![]()
Аналог угловой скорости кривошипа:
φ ‘ 1= 1 - из задачи о скорости. Аналог углового ускорения кривошипа:
φ" 1=0 - из за задачи об ускорении.
2.4.2 Шатун.
Координаты точки В:
![]()
Проекции аналога скорости точки В:
![]()
Проекция аналога ускорения точки В:
![]() .
.
Проекция отрезка аг (B-s2):
![]() .
.
Координаты точки s2:
![]()
Аналог
угловой скорости шатуна: из задачи о скорости.
из задачи о скорости.
Аналог
углового ускорения шатуна: из задачи об ускорении.
из задачи об ускорении.
Проекции аналога скорости точки S2 относительно точки В:
![]()
Проекция аналога скорости точки S2:
![]()
Проекция аналога ускорения точки s2 относительно точки В:
![]()
Проекция аналога ускорения точки s2:
![]()
2.4.3 Ползун.
Координаты точки S3:
![]() .
.
Проекции аналога скорости точки S3:
![]() .
.
Проекции аналога ускорения точки S3."
![]() .
.
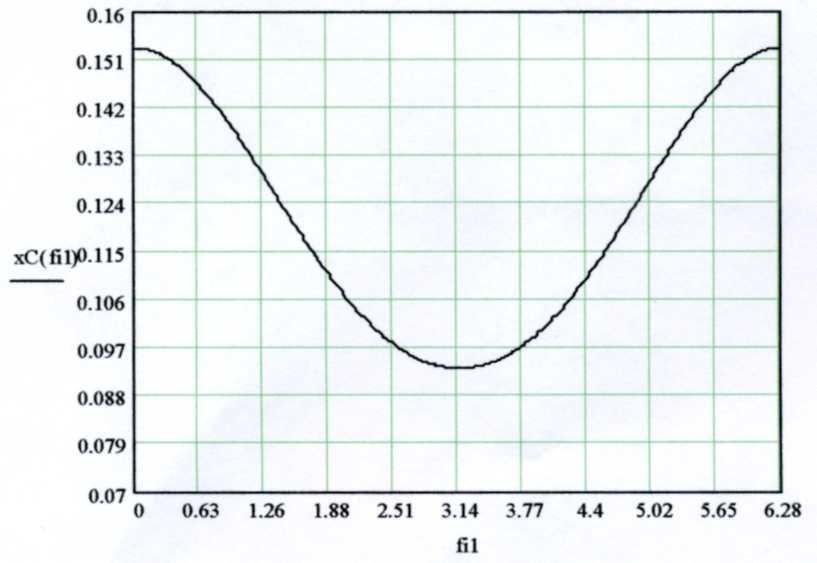
Функция положения точки С:
![]() •
•
Аналог скорости точки С:
![]() •
•
Аналог ускорения точки С:
![]() •
•
Перемещение ползуна
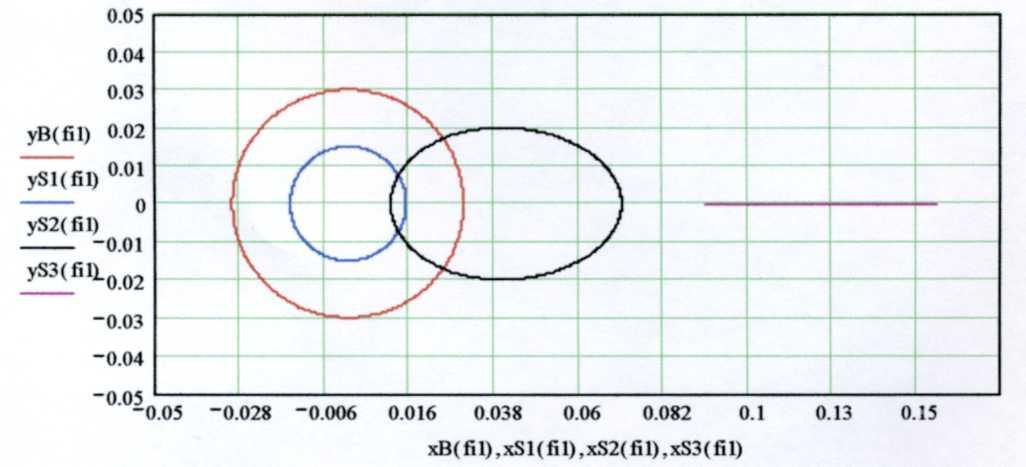
Кривошипная, шатунная и ползунная кривые
Ускорение и скорость ползуна

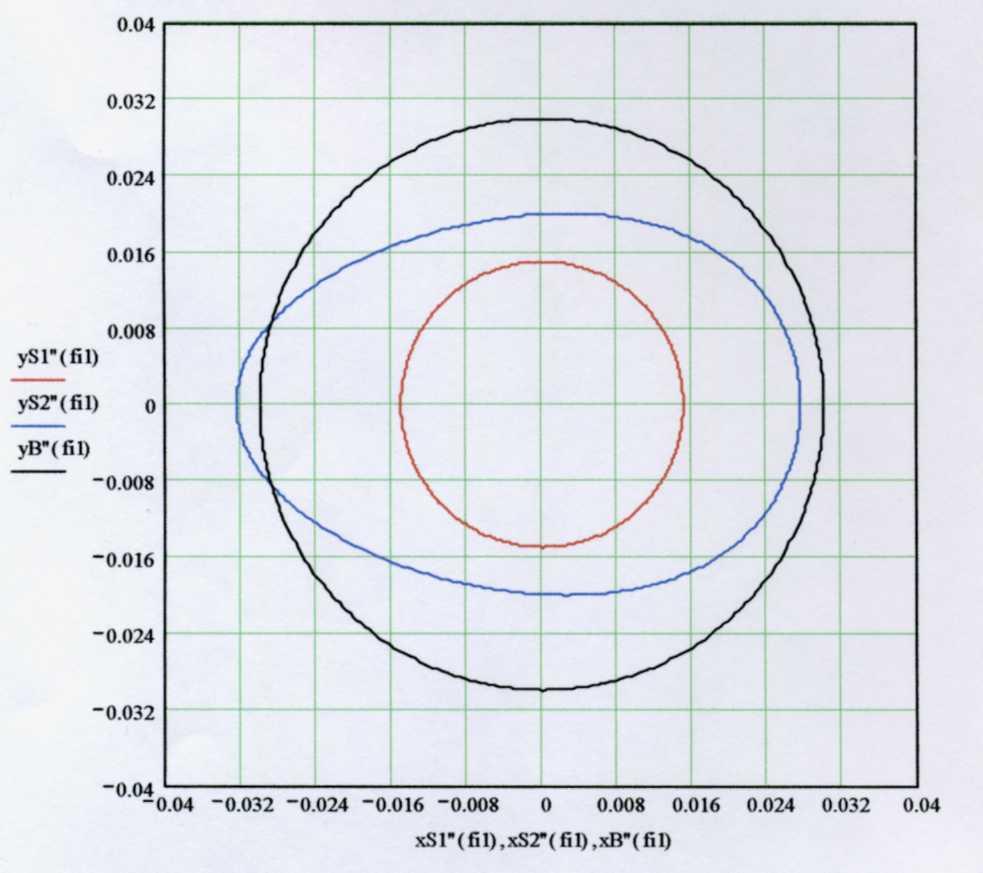
Годографы аналоговых скоростей

Изменение аналога скорости и аналога ускорения шатуна

Положение кривошипно-ползунного механизма



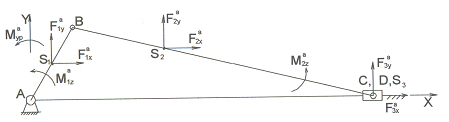
3. Силовой расчет.
Проекция отрезка A-Sr.
Проекция отрезка B-s2:

Проекция отрезка А-В:

Проекция отрезка В-С:
![]()
Основываясь на принципе возможных перемещений, запишем уравновешивающий момент:

Теперь механизм можно рассматривать как твердое тело

Реакции в шатуне:

Реакции в ползуне:

Реакции в кривошипе:


3.1 Сила тяжести


Уравновешивающий момент от силы тяжести:

3.2 Внешние активные силы.

F3ax = -8000, (Fr, действует на промежутке от нижней мертвой точки до верхней мертвой точки).
Уравновешивающий момент от внешних активных сил:

3.3 Силы инерции.
Аналоги сил инерции Iго порядка:

Аналоги сил инерции IIго порядка:


4. Расчет маховика.
При исследовании движения механизма, находящегося под действием заданных сил, удобно все силы, действующие на звенья, заменять силами, приложенными к звену приведения. Выбирают то звено, по обобщенной координате которого проводится исследование механизма, то есть кривошип.
Приведенный момент - момент, которым наделяется звено приведения и он развивает такую же кинетическую энергию, как и кинетическая энергия всего механизма.
![]()
Производная от приведенного момента инерции по φ1:
![]()
Уравновешивающие моменты от аналогов сил инерции Iго и Пго порядка.
![]()
Коэффициент неравномерности хода:

Средняя угловая скорость:
![]()
Максимальная угловая скорость:
![]()
Минимальная угловая скорость:
![]()
![]()
Момент движущих сил:
![]()
Работа движущих сил:
![]()
Момент сил сопротивления:
![]()
Работа сил сопротивления:
![]()
Приращение кинетической энергии:
![]()
Определение вспомогательных функций F, и F
![]()
Докажем, что F1, достигает F1m при ω=ωmin. Предположим, что на главном валу машины установлен маховик с требуемым моментом инерции 1м. Обозначим 1п и <о0 значения 1п и со в начале цикла:

Момент инерции маховика:
![]()
Определение значения 1п в начале цикла:
![]()
Определение начальных условий интегрирования.
![]()
Кинетическая энергия накопленная в период разгона:
![]()
Кинетическая энергия внутри цикла:
![]()
Угловая скорость кривошипа:

Угловое ускорение кривошипа:
