

Потрібна величина противаги
![]() .
.
11.2.3. Опорно-обертальні пристрої стаціонарних кранів
Стаціонарні крани влаштовують на опорних спорудах так, щоб при їх обертанні вертикальні і горизонтальні зусилля передавались від крана на споруду з найменшими витратами на тертя в опорах. Нижче будуть розглянуті окремі види опор, які застосовують в опорно-обертальних пристроях кранів.
Опори на стандартних підшипниках
Особливою вимогою до конструкцій опор
стаціонарних кранів є те, що вони повинні
компенсувати кутові відхилення
вертикальної осі крана при його монтажу
і при роботі. З цією метою у верхніх і
нижніх опорах кранів застосовують
радіальні сферичні підшипники (для
сприйняття горизонтальних сил) у
сполученні з упорним підшипником
(для сприйняття вертикальних сил), який
має бути тільки в одній з опор. На рис.11.6
наведена схема установки обертової
частини крана (рис.11.6, а) та конструктивні
схеми верхньої і нижньої опор (рис.11.6,
а і 11.6, б). При відхиленнях осі крана на
кут
![]() відбувається компенсація такого
відхилення у верхній і нижній опорах
за рахунок сферичних підшипників. Крім
того, в нижній опорі застосовують
кульовий корпус (підп’ятник) упорного
підшипника, який дозволяє останньому
знайти положення, відповідне куту нахилу
осі обертання крана.
відбувається компенсація такого
відхилення у верхній і нижній опорах
за рахунок сферичних підшипників. Крім
того, в нижній опорі застосовують
кульовий корпус (підп’ятник) упорного
підшипника, який дозволяє останньому
знайти положення, відповідне куту нахилу
осі обертання крана.
Опори нестандартної конструкції
При значних величинах перекидних моментів опори кранів не можуть бути виконані на стандартних підшипниках, які мають обмежені параметри за навантаженням. Тоді застосовують індивідуальні конструктивні схеми опор. За принципом побудови такі опори можуть бути роликовими та катковими. Роликова опора зображена на рис.11.7.

Рис. 11.6. Підшипникові опори стаціонарного крана з верхньою зовнішньою опорою


Рис. 11.7. Роликова опора
При проектуванні опори необхідно вибрати діаметр ролика. Для цього визначають нормальну силу на ролик
 ,
,
де α – кут між роликами.
Момент опору від сил тертя в опорі
Т![]() ,
,
де
![]() –
коефіцієнт тяги для ролика.
–
коефіцієнт тяги для ролика.
Багатокаткова опора зображена на рис.11.8.

Рис.
11.8. Багатокаткова опора
![]()
Найбільше зусилля на каток визначається з проекції всіх сил на напрямок сили Н:
 ,
,
де
![]() ,
,
тобто
 .
.
Тоді
 .
.
Момент опору в багатокатковій опорі визначаємо з рис.11.9.
Рис. 11.9. Опір коченню катків в опорі
Опір коченню одного катка, прикладений до зовнішнього кільця підшипника, тобто до обертальної частини крана:
![]() ;
;
для n катків загальне нормальне зусилля на катки:
 ,
,
тобто
 ).
).
Кружне
зусилля від опору коченню n![]() навантажених
катків:
навантажених
катків:
![]()
![]() .
.
Момент опору обертанню крана в опорі:
![]() ,
,
де
![]() – зовнішній
діаметр кільця кочення катків.
– зовнішній
діаметр кільця кочення катків.
11.3. Пересувні крани
11.3.1. Пересувні крани на візках
Пересувні крани на візках як правило обладнані стріловими системами, тому в більшості їх називають кранами стріловими. На рис.11.10 показано принцип побудови стрілового крана на візку.
У загальному випадку до конструкції стрілового крана входить візок 1, який має механізм пересування 2. На візку влаштовано опорно-обертальний пристрій 3, на який спирається обертова платформа 4. Стріла 5 шарнірно з’єднана з платформою. Для утримання стріли на платформі зводиться металева конструкція 6, яку називають надбудовою.
У надбудові розташовані блоки поліспаста 7 механізму підйому стріли 8. Привідна частина механізму підйому вантажу 9 через блоки на надбудові з’єднана з гаковою підвіскою 10. Механізм обертання обертової частини крана 11 установлено на обертовій платформі так, що вихідна шестерня 12 створює відкриту зубчасту передачу з зубчастим вінцем 13, який нерухомо закріплено на візку 1. Для керування краном передбачена кабіна машиніста 14.
Далі розглянемо особливості конструкції та розрахунків окремих складових частин пересувного стрілового крана.
Загалом пересувні крани можуть мати роздільний, груповий або комбінований привід. Роздільний привід на механізми має місце у випадку установлення на крані пристрою у вигляді дизеля з генератором струму, а на кожному механізмі – електричного чи гідравлічного двигуна. Груповий привід відрізняється тим, що робоче зусилля на кожен механізм подається від одного двигуна через систему складних трансмісійних механічних передач.
Візок являє собою потужну раму, яка обладнана механізмом пересування і на яку спирається обертова частина крана. На рамі жорстко закріплене нижнє кільце опорно-обертального пристрою обертової частини крана.

Рис. 11.10. Стріловий пересувний кран на візку
Найбільше зусилля на колесо
![]()
![]()
![]() .
.
Момент опору від сил тертя в опорно-обертальному пристрої
![]() ,
,
де
![]() –
коефіцієнт
тяги для колеса;
–
коефіцієнт
тяги для колеса;
![]() –
коефіцієнт
тертя у цапфі.
–
коефіцієнт
тертя у цапфі.
Колісний опорно-обертальний пристрій показано на рис.11.11.

Рис.11.11. Колісний опорно-обертальний пристрій:
1– нижнє рейкове кільце;
2 – опорні колеса;
3 – центральна цапфа.
Багатокатковий опорно-обертальний пристрій показано на рис.11.12.

Рис. 11.12. Багатокатковий опорно-обертальний пристрій:
1 – нижнє рейкове кільце;
2 – каток;
3 – верхнє рейкове кільце;
4 – сепаратор.
Найбільше зусилля на каток
![]() ,
,
де
![]() –
зусилля від ваги обертової частини
крана;
–
зусилля від ваги обертової частини
крана;
![]() ,
,
де
![]() –
кількість катків;
–
кількість катків;
![]() –
найбільше
зусилля від перекидного моменту.
–
найбільше
зусилля від перекидного моменту.
Знайдемо
![]() з
наступних міркувань.
з
наступних міркувань.
Зусилля на проміжний каток
![]() .
.
З
рис.11.13:
![]() ;
;
![]() ;
;
![]() .
.
Перекидний момент
![]() ,
,
тобто
![]() ,
,
звідки
 .
.
Найбільш компактним за конструкцією є опорно-обертальний пристрій, виконаний без центральної цапфи з застосуванням однорядних або дворядних кулькових чи каткових кілець. Такі пристрої уніфіковані і виготовляються спеціальними виробництвами. На рис.11.13 показано принцип роботи дворядного кулькового опорно-обертального пристрою.
Як
видно з рис.11.12, вертикальна сила V
сприймається верхнім шаром кульок і
передається на зовнішнє кільце, яким
може бути зубчастий вінець відкритої
зубчастої передачі механізму обертання
обертової частини крана. Реакція Н
від перекидного моменту сприймається
нижнім шаром кульок. Горизонтальна
сила![]() передається
на необертову частину крана обома шарами
кульок.
передається
на необертову частину крана обома шарами
кульок.

Рис. 11.13. Дворядний кульковий опорно-обертальний пристрій
Найбільш поширеними механізмами пересування стрілових кранів є гусеничні, пневмоколісні та залізничні. На рис.11.14 наведена загальна принципова схема гусениці, яка є рушієм гусеничного механізму пересування. До її складу входить рама 1, на якій змонтовані привідне колесо 2 та натяжне 3. Колеса охоплює гусенична стрічка 4, яка складається з окремих ланок 5, з’єднаних між собою шарнірно. Машина своєю вагою спирається через раму 1 на опорні ролики 6, які можуть влаштовуватись окремо або в балансирах 7.

Рис. 11.14. Принципова схема побудови гусениці
Для підтримки вільної гілки гусеничної стрічки служать ролики 8. Зчеплення привідного колеса з гусеницею відбувається звичайним ланцюговим зачепленням, або кулачково-гребневим, коли на привідному колесі створюють зубці-кулаки, а на ланках гусениці – гребні.
При пересуванні крана виникає опір від сил тертя в гусениці та від сил зминання грунту. Для визначення величини цього опору використовують формулу
![]() ,
,
де G – загальна вага крана;
![]() –
коефіцієнт
тяги, який визначається експериментальним
шляхом для окремих видів покриття, яким
рухається кран.
–
коефіцієнт
тяги, який визначається експериментальним
шляхом для окремих видів покриття, яким
рухається кран.
Для гусеничного механізму окремим розрахунком визначають потужність приводу, яка потрібна для розвороту крана, коли він рухається дугою. На рис.11.15 наведена схема для виконання такого розрахунку.

Рис. 11.15. Розрахункова схема для визначення потужності розвороту гусеничного крана
Загальна потрібна потужність при песуванні крана радіусом
![]() ,
(11.1)
,
(11.1)
де
![]() –
потужність, що витрачається на долання
сили опору
–
потужність, що витрачається на долання
сили опору
![]() від тертя гусениць, що рухаються зі
швидкістю крана
від тертя гусениць, що рухаються зі
швидкістю крана
![]() за дотичною до кола радіусом R
з центром О,
за дотичною до кола радіусом R
з центром О,
![]() ,
(11.2)
,
(11.2)
![]() –
потужність,
що витрачається на обертання кожної
гусениці навколо центра
–
потужність,
що витрачається на обертання кожної
гусениці навколо центра
![]() ,
,
![]() ,
,
де
![]() –
момент від тертя гусениці по ґрунту,
–
момент від тертя гусениці по ґрунту,
![]() ,
,
де L – довжина опорної поверхні гусениці;
![]() –
коефіцієнт
тертя гусениці по покриттю.
–
коефіцієнт
тертя гусениці по покриттю.
Тоді
![]() , (11.3)
, (11.3)
при цьому
![]() .
.
Таким чином,
![]() .
(11.4)
.
(11.4)
Окремим розрахунком для пересувних кранів є визначення їх стійкості на покритті площадки, коли кран виконує робочі операції, а також стійкості, коли кран не працює, і діє вітровий натиск неробочого стану.Такі розрахунки називають:
– розрахунок вантажної стійкості робочого стану крана;
– розрахунок власної стійкості неробочого стану крана.
У результаті кожного розрахунку визначають відповідно коефіцієнти запасу стійкості, які називають:
– коефіцієнт вантажної стійкості крана;
– коефіцієнт власної стійкості крана.
Кожен з коефіцієнтів є відношенням суми всіх моментів, що діють на кран відносно точки (або лінії) його перевертання без врахування моменту від активної сили перевертання, до моменту від активної сили перевертання. За активну силу перевертання при визначенні коефіцієнта вантажної стійкості приймають силу ваги вантажу, при визначенні коефіцієнта власної стійкості – силу натиску вітру на кран неробочого стану. Формули для коефіцієнтів мають наступний вигляд:
– коефіцієнт вантажної стійкості

– коефіцієнт власної стійкості
 ,
,
де
![]() –
моменти сил, які діють на кран у робочому
стані (рис.12.7);
–
моменти сил, які діють на кран у робочому
стані (рис.12.7);
![]() – момент
від сили ваги вантажу;
– момент
від сили ваги вантажу;
![]() – моменти
сил, які діють на кран у неробочому стані
(рис.12.8);
– моменти
сил, які діють на кран у неробочому стані
(рис.12.8);
![]() – момент
від сили вітряного натиску неробочого
стану крана;
– момент
від сили вітряного натиску неробочого
стану крана;
![]() – допустиме
значення коефіцієнта вантажної стійкості;
– допустиме
значення коефіцієнта вантажної стійкості;
![]() – допустиме
значення коефіцієнта власної стійкості
крана.
– допустиме
значення коефіцієнта власної стійкості
крана.

Рис. 11.16. Вантажна стійкість крана

Рис. 11.17. Власна стійкість крана
Сили, які показані на рис.11.16 та11.17:
![]() – вага
крана без стрілової системи;
– вага
крана без стрілової системи;
![]() – вага
стрілової системи;
– вага
стрілової системи;
![]() – вага
вантажу;
– вага
вантажу;
![]() – інерційна
сила вантажу, який піднімається з
прискоренням
– інерційна
сила вантажу, який піднімається з
прискоренням
![]() ;
;
![]() – інерційна
сила стріли, яка рухається з прискоренням
– інерційна
сила стріли, яка рухається з прискоренням
![]() ;
;
![]() – відцентрова
сила від стріли і вантажу при обертанні
крана, зведена до оголовку стріли;
– відцентрова
сила від стріли і вантажу при обертанні
крана, зведена до оголовку стріли;
![]() – відцентрова
сила від маси крана;
– відцентрова
сила від маси крана;
![]() – сила
вітрового натиску робочого стану крана;
– сила
вітрового натиску робочого стану крана;
![]() – сила
вітряного натиску неробочого стану
крана.
– сила
вітряного натиску неробочого стану
крана.
Момент від сили ваги вантажу
![]() .
.
Момент від сили вітряного натиску неробочого стану крана
![]() .
.
Для визначення маси вантажу в різних положеннях стріли будують вантажну характеристику крана (рис.11.18).

Рис. 11.18. Вантажна характеристика стрілового крана
З митою підвищення вантажної стійкості крана на покритті площадки застосовують виносні опори (аутригери) (рис.11.19).

Рис. 11.19. Застосування аутригерів на стріловому крані
Стійкість
крана при роботі на аутригерах збільшується
за рахунок того, що відстань від вантажу
до точки перекидання крана зменшується
від
![]() до
до
![]() , і момент від сили ваги вантажу
зменшується теж.
, і момент від сили ваги вантажу
зменшується теж.
Для захисту крана від можливого перевертання в результаті непередбаченого зростання перекидного моменту, на крані повинна бути установлена згідно з нормативними вимогами спеціальна апаратура. Принцип її дії полягає в тому, що при досягненні стійкості крана обмеженої величини автоматично вимикається енергопостачання до механізму підйому вантажу і подається відповідний сигнал.
Для
контролю допустимої
величини коефіцієнта
![]() на крані установлюють датчики для
реєстрації сили ваги вантажу і відстані
сили ваги вантажу до точки перевертання
крана. Збільшення однієї величини може
відбуватися тільки до тієї межі, коли
її добуток з іншою не перевершує
допустимої величини перекидного моменту.
Пристрої, що виконують цю функцію,
називають обмежувачами
вантажопідйомності кранів
(ОВК).
на крані установлюють датчики для
реєстрації сили ваги вантажу і відстані
сили ваги вантажу до точки перевертання
крана. Збільшення однієї величини може
відбуватися тільки до тієї межі, коли
її добуток з іншою не перевершує
допустимої величини перекидного моменту.
Пристрої, що виконують цю функцію,
називають обмежувачами
вантажопідйомності кранів
(ОВК).
Найбільш
простий ОВК будується за електричною
схемою з застосуванням двох потенціометрів
і реле нульового струму PO
(рис.11.20). Омічні опори
![]() і
і
![]() в сумі дають одну і ту ж величину
відповідно до обмеженого добутку
в сумі дають одну і ту ж величину
відповідно до обмеженого добутку
![]() .
У критичному положенні струм через реле
PO
буде нульовим, що відповідає втраті
стійкості крана.
.
У критичному положенні струм через реле
PO
буде нульовим, що відповідає втраті
стійкості крана.

Рис. 11.20. Принципова електрична схема ОВК
11.3.2. Крани мостового типу
Залежно від способу установлення крани мостового типу поділяються на: мостові і козлові.
На рис.11.21. та 11.22 наведені установки мостового та козлового кранів. Об’єднуючою ознакою цих кранів є те, що основною складовою частиною крана, на якій розташоване його робоче обладнання, є міст.

Рис. 11.21. Установка мостового крана
До складу мостового крана входять наступні конструктивні частини та споруди:
- фундамент 1;
- підкранові колони 2;
- підкранові балки 3;
- підкранові рейки 4;
- міст 5;
- механізм пересування крана 6;
- вантажний візок 7;
- механізм піднімання вантажу 8;
- механізм пересування візка 9;
- підвід струму до крана 10;
-
підвід струму до вантажного візка 11.

Рис. 11.22. Установка козлового крана
До складу козлового крана входять:
- фундамент 1;
- підкранові балки 2;
- підкранові рейки 3;
- опори крана 4;
- міст 5 (рис.11.23);
- механізм пересування крана 6;
- вантажний візок 7;
- механізм піднімання вантажу 8;
- механізм пересування візка 9;
- підвід струму до крана 10 і до вантажного візка 11;
- кабіна машиніста 12.
Рис. 11.23. Схема мосту крана
Пролітна балка мосту складається з головної балки для сприймання вертикальних сил Fв та допоміжної балки для сприймання горизонтальних сил Fг (рис. 11.24).
Коли пролітні балки виконані коробчастими, вертикальна і горизонтальна сили сприймаються однією пролітною балкою.

Рис. 11.24. Переріз прогінної балки
Мостові крани за конструкцією мосту поділяються на однобалкові та двобалкові, опорні та підвісні, однопролітні та багатопролітні, гратчастої конструкції та листової, жорсткого з’єднання кінцевих та проміжних балок і шарнірного.
Козлові крани також можуть бути однобалковими та двобалковими, з гратчастими балками і листовими. Крім того, козлові крани різняться конструкціями опор і тим, що при значних прольотах одна з опор крана приєднується до мосту жорстко, а інша – шарнірно, щоб компенсувати температурні здовження мосту. Конструктивні особливості козлових кранів витікають з їх призначення. Вони використовуються для обслуговування гідроелектростанцій, складів, монтажних майданчиків, будівельних об’єктів, тощо. Якщо опори козлового крана закріплені на кінцях мосту, то кран називають безконсольним. Разом з цим на кінцях мосту можуть бути споруджені одна з одного боку консоль або дві – з двох боків. Такі крани називають, відповідно, одно- та двоконсольними.
За допомогою крана мостового типу піднятий вантаж можна переміщувати у вертикальній площині та двох взаємно перпендикулярних горизонтальних площинах. Для використання цієї мети кран має вантажний візок, на якому установлено механізм піднімання вантажу та механізм пересування візка. Візок рухається рейками, що встановлені на пролітних балках. У напрямку, перпендикулярному мосту, переміщення вантажу забезпечує механізм пересування мосту. Захист від переходу вантажних візків та кранів за допустимі відрізки їх шляху застосовують спеціальні кінцеві вимикачі. За «Правилами» кінцевий вимикач повинен розривати електричний ланцюг управління двигуном механізму і тим самим зупиняти його рух. Відповідно до схеми під час виключення напруги на двигун автоматично вмикається гальмо механізму. Кінцеві вимикачі можуть бути важільними та шпиндельними. Важільні вимикають механізм за рахунок повороту важеля, а шпиндельні – за рахунок повороту вала чи осі.
Для захисту кранів мостового типу від перевантаження застосовують обмежувачі вантажопідйомності кранів (ОВК), які застосовують для стрілових кранів, але у спрощеному виконанні. У цьому пристрої реєструють тільки масу вантажу і вимикач спрацьовує, коли ця маса перевищує 25% номінальної вантажопідйомності крана.
Для механізмів пересування кранів застосовують кінематичні схеми з:
– центральним розміщенням приводу (рис. 11.25, а).
– роздільним приводом (рис.11.25, б).


Рис. 11.25. Схеми механізмів пересування
Механізми з центральним розміщенням приводу більш ефективні при розмірі колії L<16м. При більшому розмірі колії ці механізми втрачають свої переваги, а саме: синхронність обертання пари привідних коліс та простоту конструкції. Більш ефективною виходить схема з роздільним приводом, але її застосування потребує автоматичного керування двома приводами, яке повинно забезпечити синхронність обертання пари привідних коліс на одній осі. Систему синхронізації приводів керування називають системою з електричним валом.
Для кранів мостового типу, як і для інших кранів, характерне установлення опорних коліс у буксах (рис.11.26) і балансирах (рис.11.27).
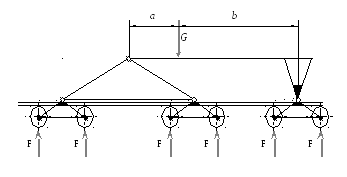
Рис. 11.26. Балансирна система

Рис. 11.27. Установлення коліс у буксах
РОЗДІЛ 12
ПРОСТІ ВАНТАЖОПІДЙОМНІ ПРИСТРОЇ
12.1. Загальні положення
Принципи побудови простих вантажопідйомних пристроїв доповнюють загальні положення про конструктивні особливості та розрахунки підйомних споруд разом із вантажопідйомними кранами. Відзнакою простих вантажопідйомних пристроїв є те, що здебільше вони мають ручний привід. Як було показано в розділі приводів, ручний привід повинен проектуватись і розраховуватись із врахуванням окремих нормативних вимог. Зокрема, привід має бути спроектованим і розрахованим із врахуванням обмежених можливостей людини створювати зусилля для піднімання вантажу певної величини і з означеною швидкістю. Пристрої, в яких використовується даний привід, мають бути сконструйовані так, щоб як в конструкції, так і в розрахунках втілювались у повній мірі названі вище вимоги.
До простих вантажопідйомних пристроїв відносять підйомно-транспортне обладнання, яке застосовують здебільшого одноразово для виконання окремих операцій піднімання та переміщення вантажів. Це домкрати, лебідки та окремі пересувні підйомні установки. Такі пристрої можуть мати ручний привід або машинний. Вантажопідйомність пристроїв коливається від декількох кілограмів до сотень тон. Прості вантажопідйомні пристрої широко застосовують при монтажних та демонтажних роботах, як засоби механізації та інше.
Далі як приклад розглянуті деякі види простих підйомних пристроїв. Мета полягає в тому, щоб показати конструктивні ознаки даних споруд і центральні розрахунки, які відбивають головний принцип їх роботи, а саме – застосування ручного приводу. Наприклад, при розгляданні домкратів для кожного типу цього підйомного пристрою наведені рівняння залежності для зусилля на робочій рукоятці від ваги вантажу, що підіймається. Для лебідок наведені окремі рекомендації щодо вибору підйомних канатів з високими характеристиками за розривним зусиллям. Це, у свою чергу, зменшує діаметри канатів і дає можливість на ручних лебідках застосовувати вантажні барабани та обвідні блоки найменшого діаметра. При цьому зменшується крутний момент на барабані і, відповідно, на привідній рукоятці чи зірочці з круголанковими ланцюгами.
12.2. Домкрати
За принципом створення підйомної сили домкрати можна поділити на:
– важільні;
– гвинтові;
– гідравлічні.
12.2.1. Важільні домкрати
У важільному домкраті виграш у силі піднімання вантажу досягається за рахунок застосування важелів та різного виду зубчастих передач. На рис.12.1 наведена схема домкрата важільного типу із зубчастою рейкою.

Рис. 12.1. Важільно-рейковий домкрат:
1 – важіль;
2 – рейка;
3 – підйомна собачка;
4 – фіксуючий пристрій;
5 – рукоятка.
Важільна система 1 може складатись з декількох важелів, з`єднаних з рукояткою 5 та підйомною собачкою 3. Остання входить до зачеплення з зубчастою рейкою 2. При підніманні вантажу на один крок зубців рейки пристрій 4 фіксує його в цьому положенні і дозволяє потім поступово вантаж опустити.
Для домкрата за рис.12.1 рівняння сил при підйому вантажу має вигляд:
![]() ,
тобто
,
тобто
![]() ,
,
де
![]() – вага вантажу;
– вага вантажу;
![]() –
зусилля
на рукоятці;
–
зусилля
на рукоятці;
![]() та
та
![]() – розміри рукоятки та важеля;
– розміри рукоятки та важеля;
![]() – ККД
важільної системи.
– ККД
важільної системи.
На рис.12.2 наведена схема рейкового домкрата з зубчастими передачами.
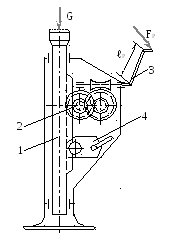
Рис. 12.2. Рейковий домкрат із зубчастими передачами:
1 – рейка;
2 – зубчасті передачі;
3 – рукоятка;
4 – фіксуючий пристрій.
Виконуючим
елементом домкрата є пара шестерня
– рейка,
з якої зусилля
![]() від
ваги вантажу передається через зубчасті
зачеплення на рукоятку (найбільш
поширеними є черв`ячні зачеплення).
від
ваги вантажу передається через зубчасті
зачеплення на рукоятку (найбільш
поширеними є черв`ячні зачеплення).
Для домкрата за рис.12.2 рівняння сил при підйому вантажу:
![]() ,
тобто
,
тобто
![]() ,
,
де
![]() – діаметр початкового кола шестерні;
– діаметр початкового кола шестерні;
![]() – передаточне
відношення зубчастих передач;
– передаточне
відношення зубчастих передач;
![]() – ККД
зубчастих передач і пари шестерня –
рейка.
– ККД
зубчастих передач і пари шестерня –
рейка.
12.2.2. Гвинтові домкрати
На рис.12.3 наведена схема гвинтового домкрата найпростішої конструкції.
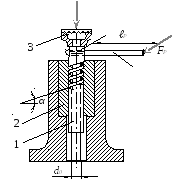
Рис. 12.3. Гвинтовий домкрат:
1 – гвинт;
2 – гайка;
3 – тарілка;
4 – рукоятка.
Зусилля
підйому вантажу
![]() у гвинтовому домкраті створюється при
обертанні гвинта 1 в гайці 2 рукояткою
4.
у гвинтовому домкраті створюється при
обертанні гвинта 1 в гайці 2 рукояткою
4.
Рівняння піднімання вантажу:
![]() ,
тобто
,
тобто
![]() ,
,
де
![]() – середній діаметр різі гвинта;
– середній діаметр різі гвинта;
![]() – кут
підйому гвинтової лінії гвинта;
– кут
підйому гвинтової лінії гвинта;
![]() –
кут
тертя в різі гвинта.
–
кут
тертя в різі гвинта.
Гвинтові
домкрати мають найпростішу конструкцію
і найвищу надійність у роботі. Але
суттєвим їх недоліком є низький ККД.
Останній залежить від кута тертя в різі.
Для зменшення кута![]() у гвинтових домкратах застосовують
спеціальні мастила та масляні ванни.
Існують конструкції домкратів, в яких
у гвинтовій парі тертя ковзання замінено
на тертя кочення шляхом застосування
кульок чи роликів на доріжці гвинта. У
цьому випадку необхідно контролювати
величину кута
у гвинтових домкратах застосовують
спеціальні мастила та масляні ванни.
Існують конструкції домкратів, в яких
у гвинтовій парі тертя ковзання замінено
на тертя кочення шляхом застосування
кульок чи роликів на доріжці гвинта. У
цьому випадку необхідно контролювати
величину кута![]() ,
щоб запобігти самоопускання вантажу
на домкраті.
,
щоб запобігти самоопускання вантажу
на домкраті.
12.2.3. Гідравлічні домкрати
Найбільш ефективним вантажопідйомним засобом з ручним, а також і машинним приводом є гідравлічний домкрат. Його відрізняє високий ККД, високе передаточне відношення і надійність підйому без руйнування несучих елементів конструкції. На рис.12.4 наведена схема найпростішого гідравлічного домкрата.
Зусилля
підйому вантажу
![]() створюється за рахунок тиску рідини в
нагнітаючому циліндрі 4, яка виштовхується
через клапан 5 у робочий циліндр. З
рівняння тиску в циліндрах маємо:
створюється за рахунок тиску рідини в
нагнітаючому циліндрі 4, яка виштовхується
через клапан 5 у робочий циліндр. З
рівняння тиску в циліндрах маємо:
 ,
тобто
,
тобто
![]() .
.
З
останнього виразу можна визначити
потрібне зусилля на рукоятці, або вагу
вантажу при заданому зусиллі
![]() .
.
12.3. Ручні та електричні лебідки (талі)
До простих вантажопідйомних пристроїв належать лебідки, що призначені для піднімання, опускання та переміщення вантажів в горизонтальному напрямку. За типом приводу лебідки поділяють на лебідки з ручним приводом та з машинним; за типом тягового елемента – на канатні і ланцюгові; за типом установки – на нерухомі (закріплені на підлозі, стіні, стелі) і пересувні (на візках, що пересуваються по підлозі або підвісним шляхом; за кількістю барабанів – на одно-, дво- і багатобарабанні; за конструкцією барабана – з нарізними, гладкими і фрикційними барабанами.

Рис. 12.4. Гідравлічний домкрат:
1 – робочий поршень;
2 – робочий циліндр;
3 – нагнітаючий поршень;
4 – нагнітаючий циліндр;
5 – перепускний клапан зворотного ходу;
6 – рукоятка;
7 – резервуар робочої рідини;
8 – випускний клапан.
На рис.12.5 показана електрична стаціонарна лебідка. На рамі 1 установлені електродвигун 2, редуктор 3 і барабан 4. Одна частина пружної втулково-пальцевої муфти має шків автоматичного колодкового гальма 5.
Для виконання піднімальних операцій застосовують компактні підйомні лебідки, які називають також талями. Талі поділяються за видом приводу на ручні і електричні, за рухомістю – на рухомі, які встановлюють на несучих конструкціях, та нерухомі, які закріплені на конструкціях нерухомо.

Рис. 12.5. Лебідка однобарабанна з електричним приводом і гладким барабаном
На рис.12.6 наведено принцип побудови ручної талі, на рис.12.7 – електричної.
При
обертанні привідної зірочки 4 в напрямку
піднімання вантажу за рахунок зусилля
![]() в підйомному ланцюгу створюється осьова
сила
в підйомному ланцюгу створюється осьова
сила
![]() ,
яка стискає фрикційну пару гальма 6. У
цьому разі черв’як 5 обертається разом
з храповим колесом 7 (див. рис. 12.5, вид
К). При зворотному русі привідної зірочки
4 храпове колесо 7 зупиняє собачка 8.
Подальше опускання вантажу здійснюється
при дії додатково прикладеного моменту
до привідної зірочки, якого повинно
бути достатньо для долання сил тертя у
фрикційній парі. Коли додатковий момент
зникає, гальмового моменту у фрикційній
парі повинно бути достатньо, щоб
утримувати вантаж у положенні висячи.
,
яка стискає фрикційну пару гальма 6. У
цьому разі черв’як 5 обертається разом
з храповим колесом 7 (див. рис. 12.5, вид
К). При зворотному русі привідної зірочки
4 храпове колесо 7 зупиняє собачка 8.
Подальше опускання вантажу здійснюється
при дії додатково прикладеного моменту
до привідної зірочки, якого повинно
бути достатньо для долання сил тертя у
фрикційній парі. Коли додатковий момент
зникає, гальмового моменту у фрикційній
парі повинно бути достатньо, щоб
утримувати вантаж у положенні висячи.

Рис. 12.6. Принцип побудови ручної талі:
1– підйомний ланцюг;
2 – підйомна зірочка;
3 – привідний ланцюг;
4 – привідна зірочка;
5 – черв’ячна передача;
6 – вантажоупорне гальмо;
7 – храпове колесо;
8 – собачка;
9 – упорний підшипник.
Електрична таль являє собою механізм піднімання вантажу з канатним барабаном і поліспастом в поєднанні з механізмом пересування. Такий візок має переваги перед звичайними візками кранів загального призначення своєю компактністю, але дещо обмежений за вантажопідйомністю.
Принцип побудови електричної талі наведено на рис.12.7.
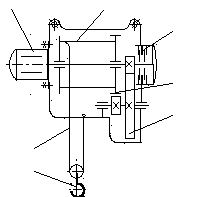
Рис. 12.7. Принцип побудови електричної талі:
1 – двигун спеціальної фланцевої конструкції;
2 – зубчасті передачі;
3 – зубчастий вінець вантажного барабана;
4 – вантажний барабан;
5 – дискове гальмо;
6 – поліспаст;
7 – вантажний гак.