

23. Принципы действия индукционного реле. Тяговая характеристика. Применения индукционного реле.
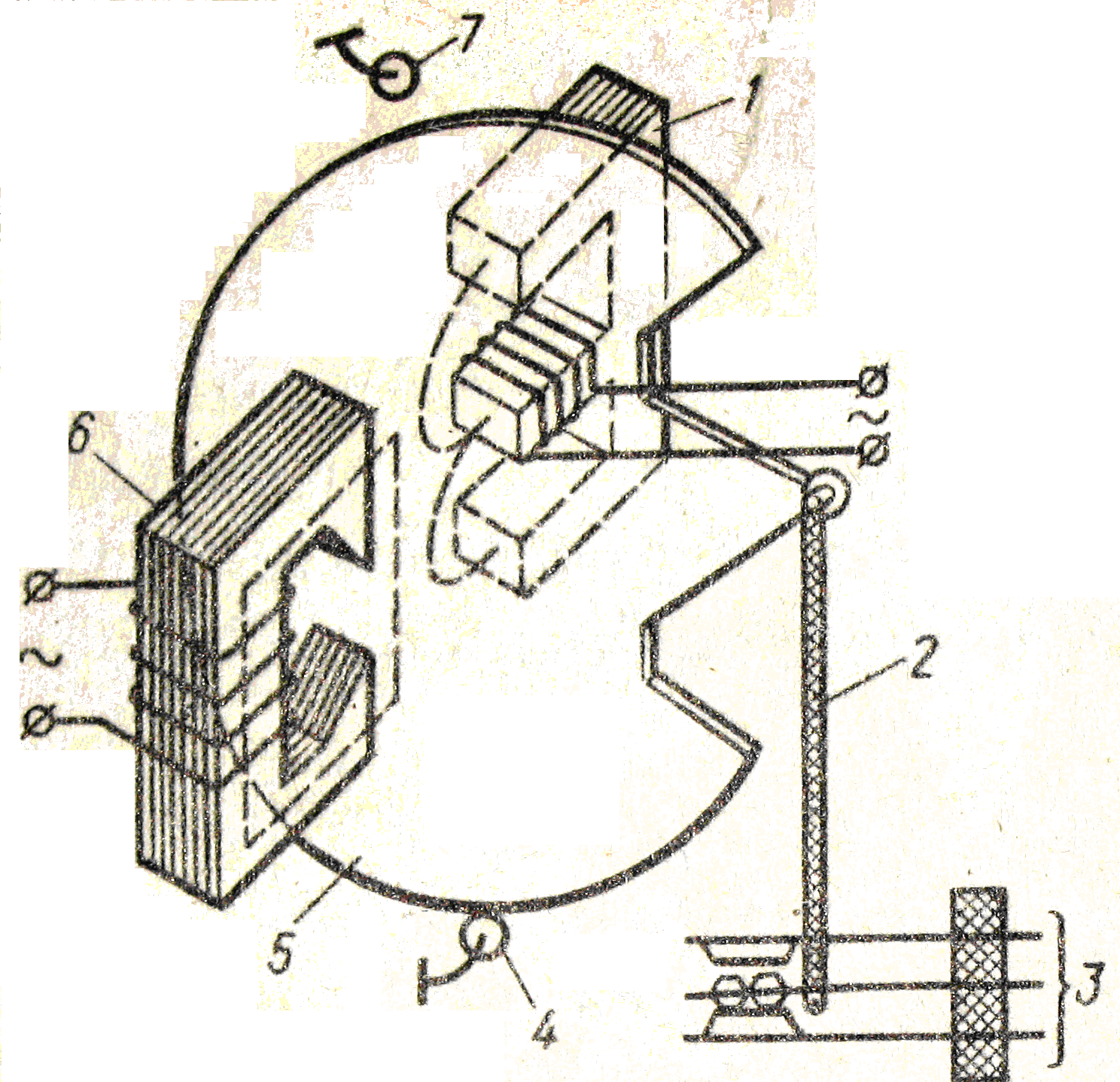
Индукционное двухэлементное секторное реле переменного тока ДСШ состоит из двух электромагнитов переменного тока, которые называют местным (МЭ) 1 и путевым (ПЭ) 6 элементами. Сердечники МЭ и ПЭ расположены симметрично друг относительно друга и представляют собой соответственно Ш-образный 1 и П-образный 6 пакеты из листовой трансформаторной стали. Оба элемента закреплены на металлической станине, в воздушном зазоре между ними перемещается в вертикальной плоскости легкий алюминиевый сектор (якорь) 5. ход сектора ограничивается роликами 4 и 7. К сектору крепится тяга 2, управляющая контактной системой 3. Когда реле выключено, то сектор находится в нижнем положении (у ролика 4). При включении электромагнитов на сектор действует вращающий момент, который перемещает его вверх (к ролику 7), переключая контакты. Фронтовые и тыловые контакты выполнены из графита с серебряным наполнением, а общие контакты – из серебра.
Построим тяговую характеристику индукционного реле:

Токи i1, i2 отстают от потоков Ф1 и Ф2 на 90°. При взаимодействии Ф1 и i2 возникает сила f1; Ф2 и i1=> f2.
Весь период разбивается на 8 участков. Силы f1 и f2 направлены вправо (нечет. участки) или в разные стороны (чет.).
Результирующая сила всегда будет направлена вправо, что исключает возможность вибрации сектора.
1. Силы f1 и f2 изменяются с двойной частотой относительно частоты питания напряжения
2. fрез>0 ВСЕГДА
3. fрез=max, если угол φ=90°. Угол φ=90°– идеальный теоретический угол
4. fрез=0, если угол φ=0°.
Применение.
Индукционные реле в железнодорожной автоматике применяют в качестве путевых в рельсовых цепях переменного тока. Рельсовая цепь представляет собой участок пути, ограниченный изолирующими стыками ИС. На одном конце в рельсы подается переменное напряжение через питающий трансформатор ПТ. На другом конце через релейный трансформатор РТ включен путевой элемент ПЭ индукционного реле. Местный элемент МЭ получает местное питание. В рельсы и на МЭ подается напряжение одной фазы.
Рельсовая цепь служит для контроля свободности участка пути


24. Местный, дистанционный и телемеханический способы управления. Понятие о системах телеуправления и телеконтроля Структурная схема системы управления.
Телемеханика — это отрасль науки и техники, охватывающая теорию и технические средства контроля и управления объектами на расстоянии с применением специальных преобразований сигналов для эффективного использования каналов связи.
В зависимости от степени удаления объектов от пункта управления применяются три способа управления: местный, дистанционный и телемеханический.
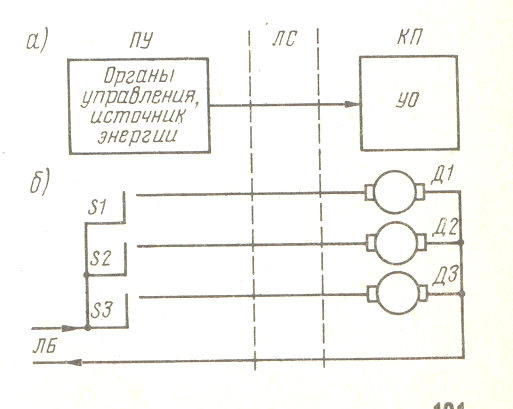
ЦП – центральный пост; ЛП – линейный пост; ЛС – линия связи. Органами управления являются ключи S1 — S3, которые включают и выключают электродвигатели Д1–Д2 (объекты управления).
“+”: 1. простота и надежность аппаратуры; 2. высокая помехозащищенность.
“–”: 1. большой расход меди для организации линии связи; 2. потери мощности в проводах. Местный способ применяют на небольших расстояниях (десятки, сотни метров) при небольшом числе объектов (десятки объектов).
Чтобы увеличить дальность управления, применяют дистанционный способ

В этом случае на ЛП в линию связи включаются промежуточные линейные реле Р1 —Р2, через контакты которых осуществляется управление двигателями. Центральный источник энергии используется для питания промежуточных реле, а управляемые объекты (двигатели) имеют местное питание от местного источника энергии. Такой способ позволяет увеличить дальность управления. Дистанционный способ принципиально отличается от местного тем, что в нем по линии связи передается информация о том, какой объект надо включить, а не энергия для включения этого объекта. Однако эта информация не является кодированной и поэтому многоканальность, как недостаток, сохраняется.
Чтобы исключить многоканальность как недостаток системы управления необходимо закодировать передаваемую информацию (телемеханический способ управления)
Он применяется при больших расстояниях и большом числе ОУ (объект управления). Основная цель телемеханического способа — сделать число каналов связи существенно меньше числа ОУ. В большинстве случаев используется всего один канал связи. Дальность управления определяется только чувствительностью и мощностью приемно-передающих устройств и в принципе неограниченна.
Виды телемеханических систем
Телеуправления (ТУ) – система для управления положением или состоянием дискретных объектов и объектов с непрерывным множеством состояний.
Телеконтроля – для получения информации о состоянии контролируемого объекта, имеющего ряд дискретных состояний.