

МОСКОВСКИЙ АВИАЦИОННЫЙ ИНСТИТУТ
(ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ)
Факультет «Робототехнические и интеллектуальные системы»
Кафедра 704 «Информационно-управляющие комплексы»
Кафедра
“Утверждено”
на заседании методсовета ф-та №7
Протокол № _____________________
«_______» _______________________
Г.А.Жуков
Учебное пособие по выполнению
курсовой работы
«Расчет и анализ прицельных поправок воздушной стрельбы»
по дисциплинам:
«Бортовые информационно-управляющие средства оснащения ЛА»
«Информационно-управляющие средства оснащения ЛА»
«Обзорно-прицельные системы»
“Обсуждено”
на заседании кафедры 704
Протокол № ____________
«_______» ______________
Москва 2010 г.
1. Исходные данные курсовой работы
1.1. Характеристики целей
Цель
№1 – самолет, выполняющий прямолинейное
и равномерное движение (![]() ).
).
Цель №1 (прямолинейное и равномерное движение цели ).
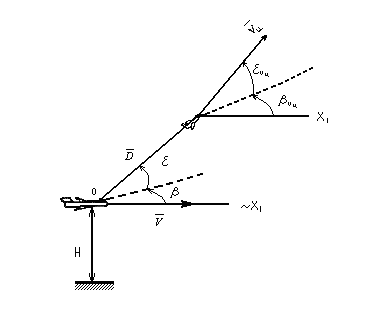
Положение цели в системе координат, связанной с ЛА, определяется дальностью D, бортовым углом цели β и углом места цели ε (при условии совмещения визирной линии с целью). Направление вектора скорости цели №1 определяется углами βVц и εVц.
1.2. Начальные условия стрельбы
Начальные условия стрельбы.
|
Параметры |
5 |
|
Н, км |
30 |
|
V , км/час |
1100 |
|
Vц , км/час |
1200 |
|
D, м |
900 |
|
β , град |
-140 |
|
ε, град |
60 |
|
βvц, град |
70 |
|
εvц, град |
20 |
|
αат, град |
6 |
|
βск, град |
-0020’ |
|
γ,υ |
0 |
1.3. Вводимые в прицельную систему величины
Значения величин, вводимых в прицельную систему.
|
Параметры |
2 |
|
C, м2/кг |
1,8 |
|
10-5 |
6,5 |
|
C2 |
0,85 |
|
V0, м/с |
850 |
|
Ввx1, м |
30 |
|
Ввy1, м |
3 |
|
Ввz1, м |
-2 |
2.1. Векторная схема и векторное уравнение задачи прицеливания
Векторная
схема задачи прицеливания при стрельбе
из авиационного артиллерийского оружия
подвижной пушечной установки (ППУ) с
использованием визирной системы
оптической прицельной станции
бомбардировщика представлена на рис.2.1.
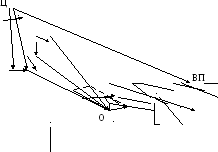
На рис. 2.1. приняты следующие обозначения:
ВП,
О, Ц
![]() – положения визирно-прицельной
подсистемы, снаряда и цели в момент
выстрела соответственно;
– положения визирно-прицельной
подсистемы, снаряда и цели в момент
выстрела соответственно;
![]() – положение цели
и снаряда через время его полета Т;
– положение цели
и снаряда через время его полета Т;
![]() - вектор выноса
визирной системы относительно оружия;
- вектор выноса
визирной системы относительно оружия;
![]() - вектор понижения
снаряда вследствие действия силы тяжести
;
- вектор понижения
снаряда вследствие действия силы тяжести
;
![]() - вектор смещения
снаряда вследствие проявления бортового
эффекта;
- вектор смещения
снаряда вследствие проявления бортового
эффекта;
![]() - вектор перемещения
цели за время Т полета снаряда;
- вектор перемещения
цели за время Т полета снаряда;
![]() - векторы дальности
до цели, фактической упрежденной
дальности и требуемой (расчетной)
упрежденной дальности снаряда;
- векторы дальности
до цели, фактической упрежденной
дальности и требуемой (расчетной)
упрежденной дальности снаряда;
![]() – векторы начальной
скорости снаряда относительно самолета,
воздушной скорости самолета и скорости
снаряда относительно воздуха (абсолютной
скорости снаряда);
– векторы начальной
скорости снаряда относительно самолета,
воздушной скорости самолета и скорости
снаряда относительно воздуха (абсолютной
скорости снаряда);
- вектор дальность полета снаряда по направлению вектора ;
![]() - вектор промаха;
- вектор промаха;
![]() - бортовой угол
стрельбы.
- бортовой угол
стрельбы.
Из рисунка следует, что для рассматриваемой прицельной схемы вектор промаха будет определяться из следующего соотношения:
![]() ,
,
(2.1)
где
векторы
![]() и
и
![]() определяются по формулам:
определяются по формулам:
(2.2)
![]() ,
,
![]() .
.
Условием
задачи прицеливания является минимизация
вектора промаха. Положим, что вектор
промаха равен нулю, т.е.
![]() .
Откуда следует, что для решения задачи
прицеливания вектор
.
Откуда следует, что для решения задачи
прицеливания вектор
![]() должен быть равен расчетному (требуемому)
вектору
должен быть равен расчетному (требуемому)
вектору
![]() , т.е.
, т.е.
Так
как векторы понижения снаряда
и бортового
эффекта
малы по сравнению
с вектором дальности стрельбы
, то направление
вектора
![]() ,
как следует из второго уравнения
(2.2), определяется единичным вектором
,
как следует из второго уравнения
(2.2), определяется единичным вектором
![]() ,
который выражается зависимостью:
,
который выражается зависимостью:
![]() ,
,
где
![]() ,
,
![]() - векторы, записанные через орты осей
систем координат, которые связаны с
этими векторами.
- векторы, записанные через орты осей
систем координат, которые связаны с
этими векторами.
Тогда
![]() .
.
(2.3)
Из
(2.3) следует, что направление вектора
![]() можно изменять векторами
можно изменять векторами
![]() или
или
![]() .
Так как оружие подвижно, то изменение
направления вектора
.
Так как оружие подвижно, то изменение
направления вектора
![]() может быть достигнуто достаточно быстро
поворотом вектора
может быть достигнуто достаточно быстро
поворотом вектора
![]() оси
, направленной
по оружию, т.е. путем поворота оружия
подвижной пушечной установки.
оси
, направленной
по оружию, т.е. путем поворота оружия
подвижной пушечной установки.
Таким
образом, для попадания снаряда в цель
необходимо фактическое конечное
положение снаряда (т.
![]() )
совместить с требуемым положением (т.
)
совместить с требуемым положением (т.
![]() ),
что согласно формулам (2.2) состоит в
реализации равенства
),
что согласно формулам (2.2) состоит в
реализации равенства
![]() .
(2.4)
.
(2.4)
В
силу того, что модули векторов понижения
снаряда
![]() и бортового эффекта
и бортового эффекта
![]() оказываются
меньше ошибок измерения дальности, то
эти векторы можно не учитывать при
определении модуля
оказываются
меньше ошибок измерения дальности, то
эти векторы можно не учитывать при
определении модуля
![]() и тогда вектор дальности стрельбы
по модулю
приближается к модулю вектора упрежденной
дальности. Будем считать, что
и тогда вектор дальности стрельбы
по модулю
приближается к модулю вектора упрежденной
дальности. Будем считать, что
(2.5)
.
С учетом уравнений (2.3), (2.4), (2.5) исходное векторное уравнение задачи прицеливания примет вид:
![]() .
.
(2.6)
Составим систему векторных уравнений и замкнем её ''повекторно''. Замкнуть систему ''повекторно'' значит выразить все векторы полученного векторного уравнения (2.6) через орты осей систем координат, связанных с этими векторами.
![]() ,
,
(2.7)
где
![]() -
орт системы координат “
-
орт системы координат “![]() ”,
связанной с оружием и ориентированной
относительно базовой (самолетной)
системы координат бортовым углом
и углом места
оружия,
которые определяют потребное
направление оружия ППУ;
”,
связанной с оружием и ориентированной
относительно базовой (самолетной)
системы координат бортовым углом
и углом места
оружия,
которые определяют потребное
направление оружия ППУ;
![]() ,
,
(2.8)
где
![]() - орт системы координат “”,
связанной с вектором воздушной скорости
летательного аппарата
. Систему
координат “”
называют скоростной или поточной
системой координат. Базовая система
координат ориентирована относительно
поточной углами скольжения
- орт системы координат “”,
связанной с вектором воздушной скорости
летательного аппарата
. Систему
координат “”
называют скоростной или поточной
системой координат. Базовая система
координат ориентирована относительно
поточной углами скольжения
![]() и атаки
и атаки ![]() ;
;
(2.9)
![]() ,
,
где
![]() - орт наземной (стартовой) системы
координат “0”. Оси базовой системы
координат ориентированы относительно
наземной курсовым углом
- орт наземной (стартовой) системы
координат “0”. Оси базовой системы
координат ориентированы относительно
наземной курсовым углом
![]() ,
углом тангажа
и углом крена
,
углом тангажа
и углом крена
![]() ;
;
![]() ,
,
(2.10)
где
![]() - множитель при векторе бортового
эффекта
- множитель при векторе бортового
эффекта
![]() ;
;
![]() - коэффициент бортового эффекта; вектор
- коэффициент бортового эффекта; вектор
![]() представлен проекциями на оси базовой
системы координат (с учетом малости
углов атаки и скольжения можно считать,
что
представлен проекциями на оси базовой
системы координат (с учетом малости
углов атаки и скольжения можно считать,
что
![]() ;
;
(2.11)
![]() ,
,
где
![]() - орт лучевой (визирной) системы
координат “D” - системы
координат, связанной с вектором дальности.
Система “D”
ориентирована относительно осей базовой
бортовым углом
и углом места
цели
.
- орт лучевой (визирной) системы
координат “D” - системы
координат, связанной с вектором дальности.
Система “D”
ориентирована относительно осей базовой
бортовым углом
и углом места
цели
.
Вектор выноса визирного устройства относительно оружия в самолетной системе координат может быть записан в виде
![]()
![]() .
.
(2.12)
Для
рассматриваемых гипотез движения цели
вектор перемещения цели
![]() за время полета снаряда T
может быть представлен в виде:
за время полета снаряда T
может быть представлен в виде:
![]()
где - для цели №5 (самолет противника, атакующий бомбардировщик, выполняет полет по кривой прицеливания) принимается 2-ая гипотеза движения цели a=1, b=1.
Для синхронного способа определения скорости и ускорения цели имеем следующие формулы :
(2.14)
![]() ,
,
(2.15)
![]() .
.
Решая систему векторных уравнений (2.5) - (2.15) при условии полного замыкания системы, т.е. написания недостающих уравнений для скалярных величин, можно найти потребные бортовой угол и угол места оружия ППУ.