

3.1.3. Построение плана ускорений кривошипно-ползунного механизма
Планом
ускорений звена механизма называют
графическое представление пучка векторов
с единым общим центром, называемым
полюсом плана ускорений( Каждый вектор, которого изображает
абсолютное ускорение точек звена. А
векторы соединяющие концы векторов
абсолютного ускорения, изображают
относительные ускорения соответствующих
точек звена.
Каждый вектор, которого изображает
абсолютное ускорение точек звена. А
векторы соединяющие концы векторов
абсолютного ускорения, изображают
относительные ускорения соответствующих
точек звена.
1)Разберем
базовый механизм 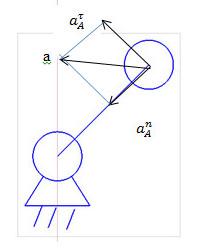
Составим векторное уравнение

В
нашей работе мы предполагаем, что
составляющей
 ,
нет. Тогда окончательное уравнение
будет иметь вид:
,
нет. Тогда окончательное уравнение
будет иметь вид:
 ,
,
Введем масштабный коэффициент

Отложим
на плане ускорений вектор
 для каждого положения
для каждого положения
 2)
Запишем векторное уравнение (.)В,
воспользовавшись теоремой о сложении
ускорений в переносном и относительном
движение.
2)
Запишем векторное уравнение (.)В,
воспользовавшись теоремой о сложении
ускорений в переносном и относительном
движение.
 ,
ускорение (.) B
в ее относительном вращательном движении
по отношению к (.) А
,
ускорение (.) B
в ее относительном вращательном движении
по отношению к (.) А

a
 =
=
Тогда
 =
=
Соответственно составим таблицу.
|
Положение |
|
|
|
2 |
0,33 |
2,4 |
|
4 |
0,3 |
2,14 |
|
6 |
0,24 |
1,74 |
 ,
,
 ,
мм
,
мм
Теперь
из точки а отложим вектор (am)
параллельно второму звену. Из точки m,
конца вектора (ma)
отложим перепендикуляр, который при
пересечении прямой параллельной
 и проходящий через полюс, даст точку
(в). Замкнем точку (а) и (в), и получем
ускорение второго звена. Ускорение
ползуна можно определить через отрезок
(в
и проходящий через полюс, даст точку
(в). Замкнем точку (а) и (в), и получем
ускорение второго звена. Ускорение
ползуна можно определить через отрезок
(в ).
).
С учетом массштабного коэффициента найдем неизвестные ускорения для каждого из звеньев.



Направление
 найдем мысленно, переместив (mb)
на план положений в точку B.
Наблюдая, за его движением из точки А,
выбранной в качестве полюса, найдем
куда будет направленно угловое ускорение
второго звена.
найдем мысленно, переместив (mb)
на план положений в точку B.
Наблюдая, за его движением из точки А,
выбранной в качестве полюса, найдем
куда будет направленно угловое ускорение
второго звена.
Составим таблицу:
|
Положение |
|
|
|
|
|
|
2 |
1,54 |
5,5 |
5,6 |
0,34 |
18,7 |
|
4 |
7,42 |
5,6 |
5,46 |
0,3 |
18,2 |
|
6 |
4,34 |
5.6 |
4,9 |
0,24 |
16,3 |





3.2. Кинематический анализ шарнирного четырёхзвенного механизма
3.2.1. Построение плана положений шарнирного четырёхзвенного механизма методом засечек
Таблица исходных данных:
|
№ |
Длины звеньев расстояния между осями, мм |
Масс звеньев , кг |
Внешние факторы, Н;Нм |
Частота оборотов n,об/мин |
Угол
| ||||||||||||
|
OA |
AB |
O3B |
OO3 |
OA |
AB |
e |
F2 |
F3 |
M2 |
M3 |
|
| |||||
|
12 |
70 |
180 |
230 |
250 |
1,4 |
3,6 |
4,8 |
33 |
45 |
7,8 |
6,8 |
45 |
225 | ||||

Определить масштабный коэффициент по формуле:

Все дальнейшие построения проводятся с учетом масштабного коэффициента. т.е
(AB)= ,
(ОА)=
,
(ОА)=
(OO3)=
Провести окружность радиусом ОА, которая представляет собой траекторию движения точки А относительно стойки.
Провести окружность радиусом O³B, которая представляет собой траекторию движения точки B относительно стойки.
Из точки А0построить дугу окружности радиусом АВ до пересечения с траекторией движения точки В относительно стойки.
Место пересечения обозначить В0.
Точку А0соединить с точкой В0.
3.2.2. Построение плана скоростей шарнирного четырёхзвенного механизма
Произвольно, исходя из удобства размещения на чертеже, выбрать положение полюса плана скоростей P.
Определить величину линейной скорости точки А ведущего звена механизма (кривошипа) из выражения
Vₐ
= ω∙OA=
Из
полюса построить вектор абсолютной
скорости точки A
перпендикулярно OA
по направлению угловой скорости![]() .
Длина вектора
.
Длина вектора![]() выбирается
произвольно, исходя из удобства
построений. При этом масштаб плана
скоростей определяется по формуле
выбирается
произвольно, исходя из удобства
построений. При этом масштаб плана
скоростей определяется по формуле

Составить
векторные уравнения для определения
вектора абсолютной скорости точки В.
Движение точки В
является
сложным, поэтому рассмотрим движение
точки В
вокруг
двух центров переноса. Относительно
первого вместе с шатуном 2 , в качестве
центра переноса выбираем точку А,
скорость которой известна. Относительно
второго центра переноса вместе с ползуном
3.
В качестве центра переноса выбираем
точку B0,
находящуюся на стойке, вектор скорости
которой тоже известен![]() .
Система векторных уравнений имеет вид:
.
Система векторных уравнений имеет вид:

Дальнейшие построения плана скоростей исходит из этого уравнения. Из точки А проведем прямую, перпендикулярную отрезку AB на плане положений, как скорости при вращательном движении шатуна относительно точки А. Теперь через полюс проведем прямую, перпендикулярную отрезку BC на плане положений. Эта прямая задает направление через B. Точку пересечения двух прямых обозначим в. Соединив эту точку с полюсом и точкой А, получим два отрезка (pв) и (ав), длинны которых позволяют найти численное значение векторов:


|
Положение |
|
|
|
1 |
0,25 |
0,18 |
|
2 |
0,34 |
0,02 |
|
3 |
0.25 |
0,19 |
|
4 |
0,08 |
0,31 |
|
5 |
0,26 |
0,09 |
|
6 |
0,28 |
0,08 |
|
7 |
0,45 |
0,37 |
|
8 |
0,09 |
0,38 |
 ,м/c
,м/c ,м/с
,м/с
Теперь найдем угловую скорость 2-ого звена.

Ее направление определим, перенеся вектор (aв) на план положений, поместив его начало в точку B. Наблюдая за движением шатуна из точки А.
Найдем угловую скорость 3-его звена

Ее направление определим, перенеся вектор (pв) на план положений, поместив его начало в точку B. Наблюдая за движением из точки А.
|
Положение |
|
|
|
1 |
1,1 |
1 |
|
2 |
1,5 |
0,1 |
|
3 |
1.1 |
1,1 |
|
4 |
0,4 |
1,72 |
|
5 |
1,13 |
0,5 |
|
6 |
1,23 |
0,4 |
|
7 |
2 |
2,1 |
|
8 |
0,4 |
2,1 |

