

Структурный анализ механизма включает в себя:
1. Построение кинематической схемы механизма.
2. Нумерацию звеньев и обозначение буквами кинематических пар.
3. Подсчет подвижных звеньев и кинематических пар различного класса.
4. Определение подвижности механизма.
5. Построение структурной схемы механизма.
6. Расчленение механизма на структурные единицы.
7. Определение класса структурных единиц.
8. Определение класса всего механизма в целом.
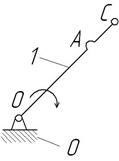
2.1. Структурный анализ кривошипно-ползунного механизма
1. Обозначаем звенья цифрами (неподвижные 0, подвижные 1, 2, 3), а кинематические пары буквами. Структурная схема механизма состоит из четырех звеньев:
0 – стойка
1 – кривошип
2 – шатун
3 – ползун
2. Подсчитываем количество подвижных звеньев, имеем n = 3.
3. Определяем класс и число кинематических пар:
0-1 — стойка-кривошип
0-3 — стойка-ползун
1-2 — кривошип-шатун
2-3 — шатун-ползун
Пары 0-1 и 1-2 — вращательные, а 0-3-поступательная, 2-3 —вращательные.
Все пары низшие, 5-го класса.
Р5 = 4
4. Определяем степень подвижности механизма по формуле Чебышева
W = 3n – 2P5 = 3 · 3 – 2 · 4 = 1
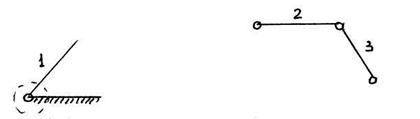
5. Разбиваем механизм на базовый и группы Ассура


В результате разбиения имеем базовый механизм и группу Ассура 2-го класса.
2.2. Структурный анализ шарнирного четырёхзвенного механизма
1.
Обозначаем звенья цифрами (неподвижные
0, подвижные 1, 2, 3), а кинематические пары
буквами. Структурная схема механизма
состоит из четырех звеньев: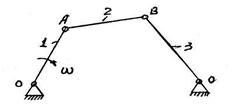
0 — стойка
1 — кривошип
2 — шатун
3 — коромысло
2. Подсчитываем количество подвижных звеньев, имеем n = 3.
3. Определяем класс и число кинематических пар:
0-1 — стойка-кривошип
0-3 — стойка-коромысло
1-2 — кривошип-шатун
2-3 — шатун-коромысло
Все пары вращательные, низшие, 5 класса, следовательно
Р5 = 4
4. Определяем степень подвижности механизма по формуле Чебышева
W = 3n – 2P5 = 3 · 3 – 2 · 4 = 1
5. Разбиваем механизм на базовый и группы Асура
В
результате разбиения имеем базовый
механизм и группу Ассура 2 класса
3. Кинематический анализ
Кинематический анализ механизма – исследование его основных параметров с целью изучения законов изменения и на основе этого выбор из ряда известных наилучшего механизма. По сравнению с синтезом анализ механизма широко используется в практике.
Кинематический анализ механизма выполняется либо для заданного момента времени, либо для заданного положения входного звена; иногда для анализируемого положения механизма задают взаимное расположение каких-либо его звеньев.
Цели:
1. Определение кинематических характеристик звеньев: перемещение; скорость; ускорение; траектория движения; функция положения при известных законах движения входных (ведущих) звеньев.
2. Оценка кинематических условий работы рабочего (выходного) звена.
3. Определение необходимых численных данных для проведения силового, динамического, энергетического и других расчётов механизма.
Исходные данные:
1. Кинематическая схема механизма.
2. Размеры и иные геометрические параметры звеньев (но только такие, которые не изменяются при движении механизма).
|
№ |
Длины звеньев расстояния между осями, мм |
Масс звеньев , кг |
Внешние факторы, Н;Нм |
Частота оборотов n,об/мин |
Угол
| ||||||||||
|
OA |
AB |
e |
OA |
AB |
e |
F2 |
F3 |
M2 |
|
| |||||
|
12 |
80 |
300 |
80 |
1,6 |
6,0 |
8,0 |
78 |
67 |
12 |
45 |
45 | ||||

3. Законы движения входных звеньев (или параметры движения, например, угловая скорость и угловое ускорение входного звена в выбранном для анализа положении механизма).