

2При заходе на посадку в условиях не ниже категории I icao:
- система огней приближения или ее часть;
- порог ВПП и его маркировка;
- входные огни ВПП;
- огни обозначения порога ВПП;
- система визуальной индикации глиссады;
- зона приземления, ее маркировка;
- огни зоны приземления;посадочные огни ВПП;
3 При заходе на посадку по категории II icao или по категории III-а icao:
- участок системы огней приближения, состоящий, по крайней мере, из трехпоследовательных осевых огней системы огней приближения;
- огни зоны приземления и осевые огни ВПП;
- посадочные огни ВПП.
Заход по схемам неточного захода на посадку по приборам.
В процессе захода по схеме неточного захода на посадкупо приборамобеспечивается наведение по курсу с включённым автопилотом без предоставленияточной информации о глиссаде.
Контроль выхода ВС на траекторию захода на посадку в боковой плоскостиосуществляется по информации, выдаваемой соответствующей системой посадкина пилотажные приборы левого и правого пилотов.
Контроль пути по дальности производится с использованиемрадионавигационных средств DME, FMС, счисления пути по времени полёта от установленнойточки входа в глиссаду – FAF. В установленной точке входа в глиссаду ВС переводится в снижение. Минимальная высота использования автопилота не должна быть ниже MDA/Н.
Заход на посадку осуществляется двумя методами:
- методом полета по ступенчатому профилю снижения;
- методом полёта по стабилизированной глиссаде снижения.
Предпочтительнымметодом захода на посадку является метод полёта по стабилизиро- ванной глиссаде снижения.
Заход на посадку методом полета по ступенчатому профилю снижения
При заходе на посадку методом полета по ступенчатомупрофилю снижения выдерживается установленныйсхемой профиль полёта. На схеме предусмотреныконтрольныеточки ступенчатого снижения. При пролёте каждой контрольнойточки экипаж должен выставить значение высоты следующей точки для контроля еёпролёта (см. рис. 2.15).
Если к моменту достижения установленной высотыконтрольной точки ВСне пролетело эту точку, то необходимо установить двигателямрежим работы,который был в горизонтальномполёте перед началом снижения, перевести ВС в горизонтальный полет и следовать до пролета контрольной точки.
Если в момент пролёта контрольнойточки заданная высота не достигнута,необходимо увеличить вертикальную скорость снижения.
Для исключения пролета контрольныхточек на высотах, больших, чемустановленные, рекомендуется осуществлять снижение с вертикальной скоростьюна 100-200 fpm превышающей V/Sref.
При заходе напосадку с использованием точки VDP (Visual Descent Point) (см. рис.2.15) обозначена символом «V», по достижении MDА/H ВС должно следовать в горизонтальномполёте до точки VDP, над которой должен бытьустановлен визуальный контакт с ВПП или её ориентирами и начато снижение суглом снижения близким к 3°.
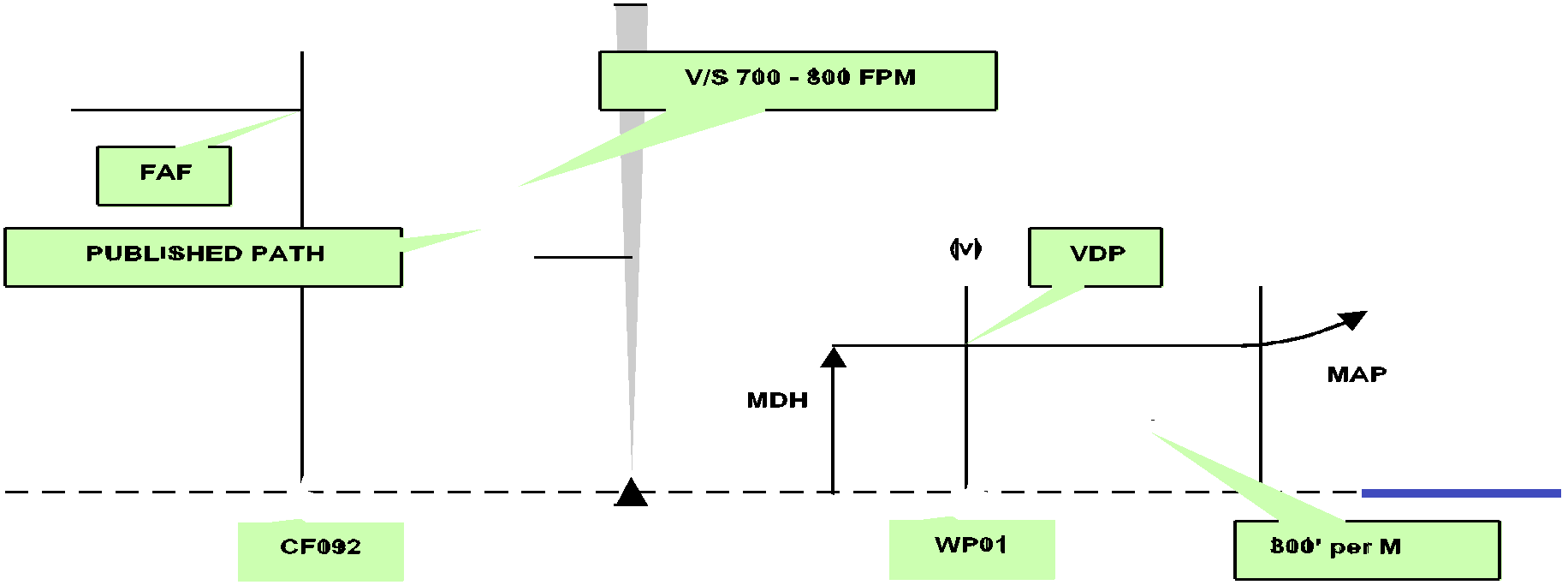
Рисунок 2.15 - Заход на посадку методом полета по ступенчатому профилю снижения
Еслипри пролёте точки VDP на достигнутой MDА/H визуальный контакт с ВПП неустановлен и/или положение ВС относительно расчётной визуальной траектории непозволяет произвести безопасную посадку, экипаж должен перевести ВС в горизонтальный полёт и следовать до точки ухода на 2-ой круг -MAPt. При пролёте MAPt экипаж должен выполнить процедуру уходана 2-ой круг, указанную на схеме захода на посадку.
Заход на посадку методом полёта по стабилизированной глиссаде
При снижении по стабилизированной глиссаде (Non-Precision Approach with constant descent path) снижение выполняетсяпо стабилизированной глиссаде спостоянным значением вертикальной скорости. Вертикальная скорость сохраняется и корректируется в процессе снижения. На всех этапах захода вертикальная скорость снижения не должна превышать 1400 ft/min, а после пролёта MDА/H –1000 ft/min.
В данном методе используются возможности бортового компьютера(FMC/ND/MAP)путём отображения вертикального профиля снижения и места достижения высоты.
Приэтом контролируется положение ВС в момент пролетаконтрольных точек схемы захода на посадку: NDB, маркеров OM, IM, VOR либо дальностей от DME попубликуемым таблицам Profile view (Таблица 1).
Таблица 2.1 Положение воздушного судна в момент пролета контрольных точек схемы захода на посадку (Profile view)

Если таблица Profile view на схеме отсутствует,то положение ВС можетконтролироваться по соотношениютекущей высоты снижения и удаления от торцаВПП (Таблица 2.2 ). Устный расчёт удаления в NM или в КМ по данным высоты в футах или метрах соответственноосуществляется по формулам: L = H/300, (NM)или L = H(М) х 0,02, (КМ) при угле снижения 3°.
Таблица 2.2 Контроль положение воздушного судна может контролироваться по соотношению текущей высоты снижения и удаления от торца ВПП
|
H, ft |
800 |
700 |
600 |
500 |
450 |
400 |
300 |
|
L, NM |
2,6 |
2,3 |
2,0 |
1,7 |
1,5 |
1,3 |
1,0 |
или
|
H, м |
200 |
180 |
160 |
140 |
120 |
100 |
80 |
|
L, км |
4,0 |
3,6 |
3,2 |
2,8 |
2,4 |
2,0 |
2,6 |
При достижении высоты MDA/Н экипажем должен быть установлен визуальныйконтакт сВПП и продолжено снижение по глиссаде с углом близким к3°.
На достигнутой высоте MDA/Н снижение по траектории должно быть прекращено и ВС переведено в горизонтальныйполёт, если визуальный контакт с ВПП или еёориентирамине установлен и/или положение ВС относительно ВПП не позволяетпродолжить заход. Если высота MDA/H не достигнута до расчётной дальности,заход на посадку также должен быть прерван в MAPt.
Уход на второй круг выполняется по опубликованной схеме, при этом до пролета MAPt развороты без указаний органа ОВД не допускаются.
При уходе на второй круг допускается пролет точки MAPt на высоте, большей чем MDА/H.
При отсутствии на схеме захода на посадку информации о MAPt (аэродромы СНГ), если визуальный контакт сВПП или её световыми ориентирами неустановлен, уход на второй круг осуществляетсяна достигнутой MDА/H в точке,расположенной на расчётном удалении от входного порога ВПП.
При принятиирешения о посадке на установленной высоте MDА/H нерекомендуется производить снижение ВС с вертикальнойскоростью более 1000 ft/min (5 м/с).
На аэродромах, оснащенныхогнями световой глиссады (PAPI, VASI и др.) дляпринятиярешения о посадке, а также определенияточки VDP рекомендуетсяиспользовать эту визуальную информацию.
Стабилизированная траектория снижения по глиссаде
При выполнении захода на посадку воздушное судно должно быть стабилизировано к достижению высоты 1000 ft (300 м) над уровнем аэродромаприинструментальных метеоусловиях (IMC) и 500 ft (150 м) над уровнем аэродромапри визуальных метеоусловиях (VMC) захода на посадку.
Воздушное судно считается стабилизированным для продолжения захода на посадку если:
- находится на расчетной глиссаде и посадочном курсе;
- для выдерживаниятраектории снижениятребуются небольшиекорректирующие движения органов управления ВС по курсу и глиссаде;
- приборная скорость по индикатору не выходит за пределы +10/-5 kt (+20 км/ч / -10 км/ч) от рассчитанной экипажем скорости захода на посадку;
создана необходимаяпосадочная конфигурация ВС, оговоренная напредпосадочном брифинге;
- вертикальная скорость снижения не превышает 1000 футов в минуту (5 м/сек).
Если конечный этап захода на посадку требует выдерживать вертикальную скорость снижения более 1000 футов в минуту (5 м/сек), это необходимо оговаривать на предпосадоч- ной подготовке (брифинге);
- режим работы двигателей соответствует данной посадочной конфигурации самолета и скорости захода;
- контроль по карте контрольных проверок выполнен в полном объеме.
При выходе каких-либопараметров захода за пределы указанных выше требованийна высотах ниже 1000ft при заходе на посадку в IMC и 500 ft при заходе на посадку в VMC необходимо немедленно выполнить уход на второй круг (см. рис. 2.16).

Рисунок 2.16 - Решение командира воздушного судна об уходе на второй круг
Снижение воздушного судна с эшелона перехода и заход на посадку разрешается, если на аэродроме посадки:
- скорость ветра у земли с учетом его направления , порывов и состояние поверхности ВПП, значение коэффициента сцепления не превышают установленных ограничений;
- видимость на ВПП (видимость) не менее минимума;
- высота нижней границы облаков (вертикальная видимость) не ниже минимума;
- состояние ВПП соответствует установленным требованиям.
Снижение воздушных судов 1 и 2-го класса с эшелона перехода и заход на посадку по минимуму I категории разрешается при высоте нижней границы облаков (вертикальной видимости) не менее 3/4 высоты принятия решения, а по минимуму II и III категорий - независимо от высоты нижней границы облаков (вертикальной видимости) при соответствии других значений для захода на посадку.
Экипаж до пролета ДПРМ обязан доложить диспетчеру о готовности к посадке и до пролета ВПР, но на удалении не менее 1000 м от порога ВПП, получить разрешение на посадку.
При полете воздушного судна от ТВГ до посадки указания и информация диспетчера службы движения по выдерживанию заданной траектории могут приниматься без подтверждения.