

3.2. Свободные колебания автомобиля
Устойчивость движения автомобиля в значительной степени определяется характером свободных угловых колебаний управляемых колес.
Численное решение полученных уравнений выполнялось в MathCAD методом Рунге – Кутта с использованием блоков Given…Odesolve. Все обобщенные силы приравнивались нулю, варьировались параметры: h и относительное демпфирование n = δ⁄2 , где δ – логарифмический декремент колебаний в системе рулевого управления. В табл. 2 указан характер колебаний при различных сочетаниях параметров относительного демпфирования и плеча стабилизации h (знаком «+» здесь отмечены автоколебательные режимы, знаком «-» – свободные затухающие колебания).
Таблица 2
|
-4 |
4 |
6 |
8 |
10 |
12 |
20 |
30 |
50 |
|
|
|
|
|
|
|
|
|
|
0,002 |
+ |
- |
- |
- |
- |
- |
- |
+ |
+ |
|
|
|
|
|
|
|
|
|
|
0,004 |
+ |
- |
- |
- |
- |
- |
- |
+ |
+ |
|
|
|
|
|
|
|
|
|
|
0,006 |
+ |
- |
- |
- |
- |
- |
- |
+ |
+ |
|
|
|
|
|
|
|
|
|
|
0,01 |
+ |
- |
- |
- |
- |
- |
- |
+ |
+ |
|
|
|
|
|
|
|
|
|
|
0,02 |
+ |
- |
- |
- |
- |
- |
- |
- |
+ |
|
|
|
|
|
|
|
|
|
|
0,05 |
+ |
- |
- |
- |
- |
- |
- |
- |
- |
|
|
|
|
|
|
|
|
|
|
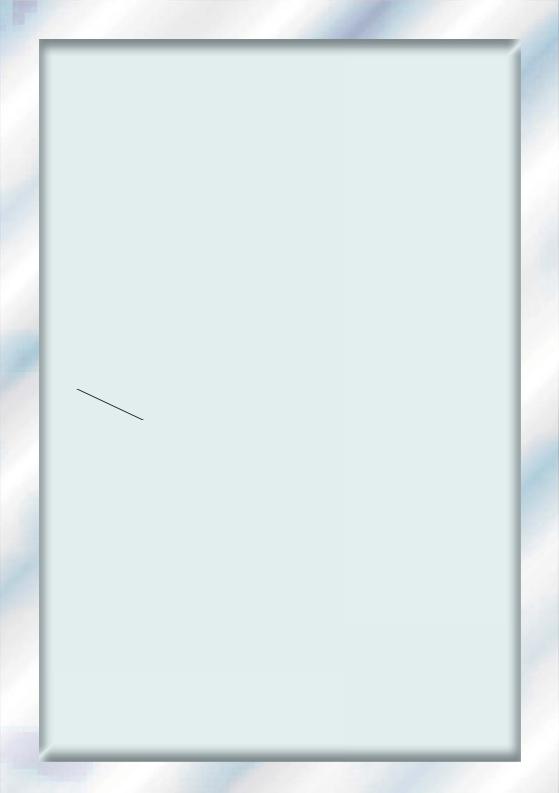
При малых h (<0,4 мм) и тем более при отрицательных значениях этой величины возникают автоколебания, т. е. процесс неустойчив. С увеличением h до значений 10...20 мм колебания становятся затухающими, но при чрезмерном увеличении h (>30 мм) вновь оказываются неустойчивыми.
На рис. 2, 3 приводятся графики свободных затухающих и незатухающих колебаний управляемых колес.
34
Рис. 2. График свободных затухающих колебаний управляемых колес
Рис. 3. График свободных незатухающих колебаний управляемых колес
35