

3.3. Дифференциальные уравнения асинхронного двигателя в осях d, q
Уравнения асинхронной машины выводятся из уравнений, составленных по закону Кирхгофа для каждой фазы статора и для обмоток ротора таким же образом, как и для синхронных машин. Но кроме преобразований переменных статора к осям, вращающимся вместе с полем статора, производится преобразование составляющих тока ротора к осям, вращающимся имеете с ротором. Дифференциальные уравнения асинхронного двигателя в осях d, q, используемые в стандарте отрасли, приведены в:
![]()
![]()
![]()
![]()
![]() (1.16)
(1.16)
![]()
![]()
![]()
где Ud, Uq - составляющие напряжения сети по осям d, q; ida, iqa - составляющие токи статора двигателя по осям; ψda, ψqa - продольное и поперечное потокосцепления статора; ψrda, ψrqa - продольное и поперечное потокосцепления ротора; ωс, ωа - частоты вращения сети и двигателя; rа, ха- активное и индуктивное сопротивление статора двигателя; µ - коэффициент магнитной связи статора и ротора; Мва, Мса- вращающий момент двигателя и момент сопротивления на валу двигателя; Tja, Тrа - постоянная времени механической инерции и электрическая постоянная времени ротора.
Заводы - изготовители асинхронных двигателей определяют параметры схем замещения, на базе которых можно находить коэффициенты дифференциальных уравнений. Схема замещения асинхронного двигателя показана на рис. 1.4.
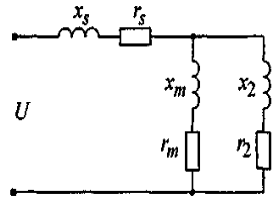
Рис. 1.4. Схемы замещения асинхронного двигателя.
Параметры схемы замещения асинхронного двигателя в относительных единицах определяются следующим образом:
Сначала определяем базисное сопротивление:
![]()
где числитель z6 - базисное сопротивление; UФН - фазное напряжение сети; знаменатель IаН - номинальный ток двигателя.
![]() (1.17)
(1.17)
В номинальном режиме:
![]() (1.18)
(1.18)
В пусковом режиме:
![]() (1.19)
(1.19)
где rm - сопротивление, учитывающее потери в магнитопроводе; хm - индуктивное сопротивление контура намагничивания; rs - активное сопротивление обмотки статора; xs - индуктивное сопротивление рассеяние обмотки статора; r2, х2 - активное и индуктивное сопротивления ротора; r2H, х2H - активное и индуктивное сопротивления ротора (приведенное к статору) в номинальном режиме; r2n, х2n - активное и индуктивное сопротивления ротора (приведенное к статору) в пусковом режиме.
3.4. Уравнение статической активно-индуктивной нагрузки
Один из основных видов нагрузки судовой электроэнергетической системы - статическая нагрузка, которая включает активные rn и индуктивные хn сопротивления. Уравнения статической нагрузки получаются таким же образом, что и уравнения синхронной машины, приведенные к осям d, q ротора генератора.
В неподвижной системе координат уравнения активно-индуктивной нагрузки записываются следующим образом [19,21,70, 89]:
![]()
![]() (1.20)
(1.20)
![]()
Совместим с началом координат системы осей а, b, с, начало координат системы d, q, вращающейся в пространстве со скоростью ω = рγ, где γ - угол между осями.
Выразим величину фазного напряжения Uа, приложенного к нагрузке и равного проекции изображающего вектора U на ось а, через проекции его на оси d, q. После преобразования получим окончательное уравнение статической нагрузки в относительных единицах:
![]()
![]() (1.21)
(1.21)
Здесь
следует иметь в виду, что хn
=
ωLn,
где
ω
-
текущее значение частоты, определяемое
скоростью вращения системы координат
d,
q,
связанной с ротором генератора. Поэтому
если определить хn
при номинальной частоте ω
=
ωб
и подставить его в уравнения нагрузки,
то влияние изменения скорости вращения
генератора следует учесть умножением
хn,
на величину (1+
φ),
где
![]() относительное отклонение скорости
вращения генератора.
относительное отклонение скорости
вращения генератора.
rn и хn определяем из равенств:
![]()