3 Математические модели элементов судовой электроэнергетической системы
Процессы, происходящие в судовых электроэнергетических системах, описываются уравнениями синхронных машин, асинхронных двигателей, статической нагрузки, автоматических регуляторов возбуждения, систем автоматического распределения активной и реактивной мощностей между генераторами, регуляторов первичных двигателей генераторных агрегатов, соединительных линий.
При исследовании и моделировании переходных процессов в СЭЭС, необходимо, прежде всего, уметь записать указанные уравнения. Эти уравнения могут быть представлены в естественных для электрической цепи фазных координатах а, b, с, в координатах, преобразованных к вращающимся осям d, q, или в смешанных координатах, а также в физических или относительных единицах. Имеется много источников, книжной и журнальной литературы, где дается соответствующее математическое.
В диссертации для разработки макромоделей отдельных видов электрооборудования и соответствующих комплексов автор использует уравнения элементов судовой электроэнергетической системы в осях d, q.
Следует упомянуть, что преобразование дифференциальных уравнений электрической машины переменного тока к ортогональным осям, связанным с ротором, предложено американским учёным электроэнергетиком Парком в 20-х годах 20-го столетия. В дальнейшем различными учёными были предложены модификации уравнений, отличающиеся различными особенностями, например, различным выбором направлений осей d, q, разными походами к определению коэффициентов уравнений, к учету насыщения магнитопровода и др. Вывод модификации уравнений, используемых в данной диссертации, приведён в.
3.1. Дифференциальные уравнения синхронного генератора в осях d, q
В настоящее время в качестве машин для преобразования химической энергии топлива в электрическую энергию широко используются агрегат в составе: двигатель Дизеля и синхронный генератор, то есть дизель-генератор. Согласно действующему стандарту ОСТ5.6030-72, разработанному в Центральном научно-исследовательском институте судовой электротехники и технологии, дифференциальные уравнения синхронного генератора в относительных единицах записываются следующим образом.
![]()
![]()
![]()
![]()
![]()
![]() (1.1)
(1.1)
![]()
![]()
![]()
![]()
![]()
Обозначения в уравнениях:
![]() -
оператор
дифференцирования;
-
оператор
дифференцирования;
Ud, Uq - составляющие напряжения статора синхронного генератора по осям d и q;
id, iq - составляющие тока статора по осям;
ψd, ψq - составляющие потокосцепления статора по осям;
ψd, ψq - составляющие потокосцепления демпферной обмотки по осям;
ψf, Tf - потокосцепление и постоянная времени обмотки возбуждения;
ird, irq - составляющие тока демпферной обмотки по осям;
ωδ, ω - базисная частота и частота вращения ротора;
if, Uf -ток и напряжение на обмотке возбуждения;
r - активное сопротивление обмотки статора;
xd, xq - синхронные реактивности статора по осям;
x'd - переходная реактивность по продольной оси;
µd, µq - коэффициенты магнитной связи обмоток статора и возбуждения по осям;
µ'd - коэффициент магнитной связи обмоток статора по продольной оси и демпферной;
g1, g2 - коэффициенты магнитной связи обмоток возбуждения и демпферной по осям;
Trd, Trq - постоянные времени демпферной обмотки по осям;
Мэ - электромагнитный момент генератора.
В практике расчетов уравнения синхронной машины удобно использовать записанными в относительных единицах (о. е.), где за базисные параметры приняты:
Амплитуда фазного номинального напряжения статора:
![]()
Амплитуда номинального тока статора:
![]()
Сопротивление:
![]()
Потокосцепление:
![]()
За базисную величину угловой частоты вращения принимаем номинальную частоту вращения:
![]() (при f=50Гц
ωδ=100π)
(при f=50Гц
ωδ=100π)
Полная мощность:
![]()
Вращающий момент, соответствующий активной мощности Sδ = Pδ, при синхронной скорости ωδ:
![]()
Потокосцепления и токи обмоток ротора и возбуждения:
![]()
![]()
где L - коэффициент самоиндукции обмоток; М - коэффициент взаимной индукции обмоток.
Схемы замещения синхронной машины показаны на рис. 1.1.
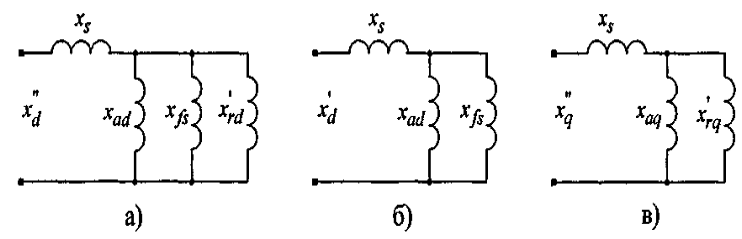
Рис. 1.1. Схема замещения синхронной машины
а) - по продольной оси; б) - по продольной оси без учета демпферной обмотки; в) - по поперечной оси.
Здесь xs - индуктивное сопротивление рассеяния статора; xad - сопротивление взаимной индукции по продольной оси; хaq - сопротивление взаимной индукции по поперечной оси; xfs - сопротивление рассеяния обмотки возбуждения; x'rd - сопротивление рассеяния демпферной обмотки продольной оси; x'rq - сопротивление рассеяния демпферной обмотки по поперечной оси.
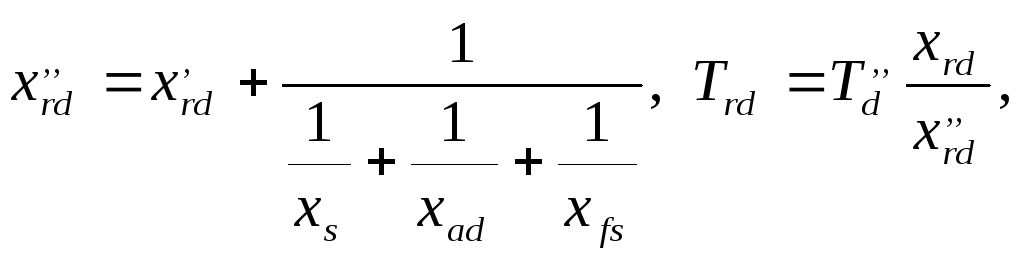
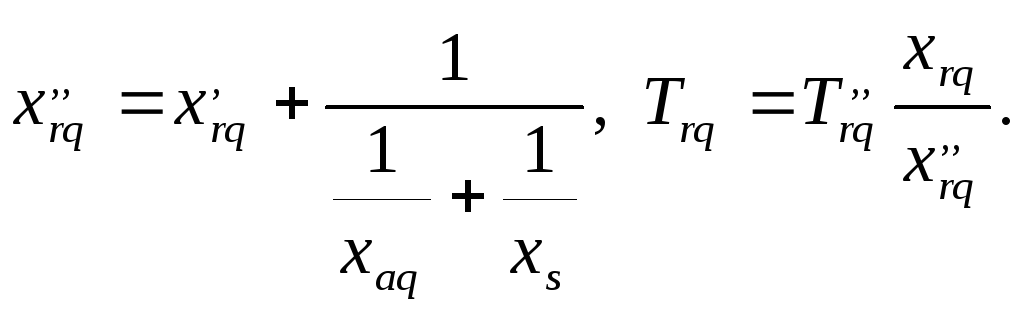
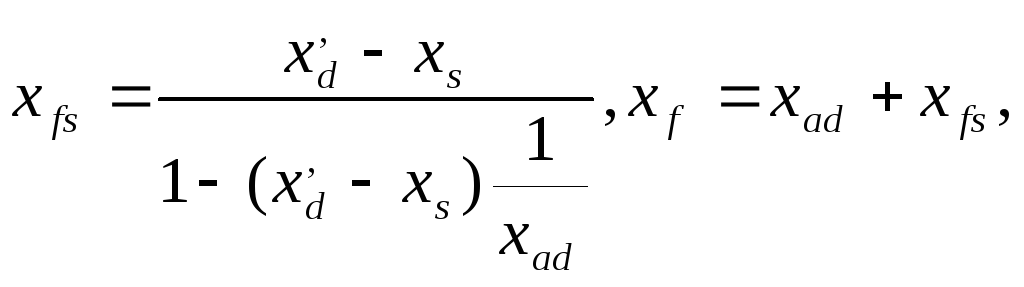
Формулы для определения коэффициентов уравнений:
![]()
![]()
![]()
 (1.2)
(1.2)
![]()