

Порядок виконання роботи:
Ознайомитися з інструкцією до виконання роботи, з інструкцією з техніки безпеки в лабораторії №333, теоретичними матеріалами, підготувати звіт.
Вивчити правила техніки безпеки, ознайомитися з робочими місцями лабораторії та правилами безпечного виконання робіт.
Потренуватися по діям у ситуаціях при виникненні потерпілого, з надання першої медичної допомоги потерпілому.
Вивчення вимірювальної апаратури робочих місць лабораторії. Розглянути вимірювальну апаратуру робочих місць лабораторії, її характеристики, склад та застосування для проведення робіт.
Вивчення заземлення та занулення у електроустановках. Розглянути заземлення та занулення робочих місць лабораторії. Візуально оглянути стан заземлення та занулення робочих місць лабораторії.
Після закінчення роботи прибрати робоче місце, повернути інструкції до виконання робіт, роздатковий матеріал та інструменти керівнику робіт.
Підготуйтеся до захисту звіту з лабораторної роботи. Дайте відповіді на контрольні питання.
Контрольні питання:
Поясніть основні правила техніки безпеки та правила безпечного виконання робіт.
Поясніть характеристику вимірювальної апаратури робочих місць лабораторії.
З якою метою виконують заземлення та занулення у електроустановках?
Як практично виконують заземлення та занулення у електроустановках?
Література: [9], с.456-494.
Завдання на самостійну підготовку: вивчити теорію, підготувати звіт.
Лабораторна робота № 2 Дослідження потенціометричних датчиків
Мета роботи- ознайомлення з принципом дії, конструкцією та вибором потенціометричних датчиків лінійних та кутових переміщень.
Прилади та обладнання:
1) Датчик лінійних переміщень 0-23 см.
2) Датчик кутових переміщень 0-240 град.
3) Амперметри : 300 мА;750 мкА.
4) Вольтметри : 150 В; 3 В.
5) Додаткові опори.
6) З’єднувальні провідники.
7) Універсальний лабораторний стенд з джерелами стабілізованих напруг постійного струму 120 В; 3 В.
Основні теоретичні положення:
В потенціометричних датчиках переміщення, яке контролюється, передається первинному перетворювачу і перетворюється за рахунок змін свого електричного опору первинного перетворювача в змінну або постійну напругу. Ці датчики включають по схемі потенціометра, тому вони й отримали назву потенціометричні. Рухомий контакт потенціометра пов’язаний з переміщенням, яке контролюється, при зміні положення об’єкту змінюється напруга на вторинному приладі PV, проградуйованому в одиницях параметра, який контролюється. З метою виключення впливу коливань живлячої напруги на точність вимірювань рекомендується подавати живлення на вимірювальну схему з потенціометричним датчиком від стабілізатора.
Характеристику потенціометричного датчика Iп=f(Rx) намагаються зробити близькою до прямолінійної (рис.1,а), задаючи потенціометру відповідний режим роботи, використовуючи той чи інший спосіб намотки дротяного реостату, а також узгоджуючи опір вторинного приладу. Якщо необхідно, щоб вихідний струм та напруга відповідали за знаком напряму переміщення повзунка, застосовують потенціометр із “середньою точкою” (рис.1,б).
Для контролю кутових переміщень використовують датчики з каркасами у вигляді дуги окружності (рис.1,в). В якості безконтактних датчиків кутових переміщень використовували рідинні потенціометричні датчики.
Характеристику та чутливість потенціометричного датчика розраховують аналітично. Так, для схеми (рис.1,а ) можна скласти наступні рівняння:
![]() ;
;
![]() ;
;![]() ;
;![]() ,
,
де
![]() – опір x-й частини
потенціометра.
– опір x-й частини
потенціометра.
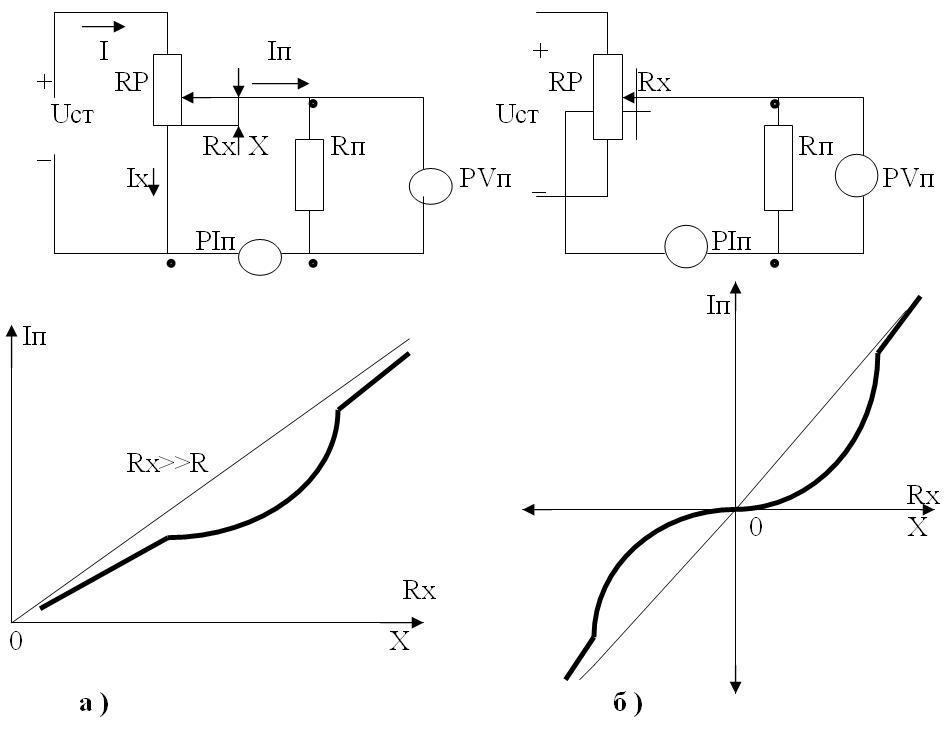
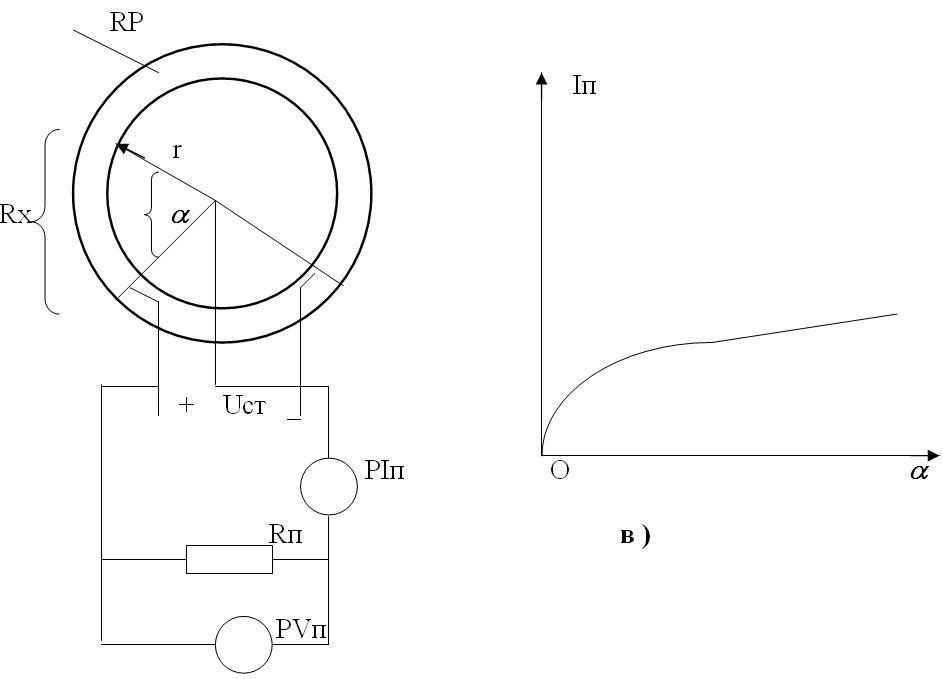
Рис.1. Потенціометричні датчики:
а) з прямим каркасом та його статична характеристика; б) з середньою точкою та його статична характеристика; в) з кільцевим каркасом та його статична характеристика. R та L – повний опір та довжина намотки потенціометра; Iп та Ix – струми в опорах Rп та Rx; Rп – опір вторинного прилада; Uст – стабілізована напруга живлення датчика; I – повний струм, що протікає від джерела напруги через вимірювальну схему з потенціометричним датчиком.
Розв’язуючи рівняння відносно Iп, одержуємо:
 ,
якщо
,
якщо
![]() ,
то
,
то
![]() ;
;
![]() .
.
Так як вихідні величини Iп та Uп прямопропорційні вхідній величині Х. Чутливість датчика (А/м або В/м ).
![]() або
або
![]()
Для датчика з кільцевим каркасом характеристики та чутливість визначають, виходячи зі слідуючих міркувань:
Напруга на вторинному приладі
![]() ,
а струм
,
а струм![]() .
.
Якщо опір потенціометра рівно розподілений по довжині окружності, то залежність струму приладу від кута повороту визначають рівнянням
Iп = Uст/(R·Rп)·r·· ,
де r – радіус каркаса, м; - опір обмотки, віднесений до одиниці довжини окружності, Ом/м·рад.
Чутливість датчика ( А/рад ): Kд = dIп/d = Uст/(R·Rп)·r·.
Зону чутливості дротяного потенціометричного датчика визначають діаметром дроту ( помилкою сходження ). Так, при переміщенні рухомого контакту на відстань, що дорівнює діаметру дроту, потенціал змінюється стрибком на значення Uст/n, де n – число витків потенціометра.
У датчика із суцільним напівпровідниковим покриттям помилка сходження відсутня. Потенціометричні датчики мають відносні точність та стабільність характеристик, простоту конструкції. Вони зазвичай не потребують підсилювачів, оскільки їх вихідна потужність достатня для роботи вторинних приладів. Потенціометричні датчики знайшли широке використання у автоматиці, в тому числі у автоматизації сільськогосподарської техніки.
Наявність рухомих частин та ковзаючого контакту у потенціометричних датчиків знижує надійність їх роботи. У сучасних засобах автоматизації перевага віддається безконтактним високоточним датчикам, але разом з тим контактні потенціометричні датчики у ряді випадків знаходять застосування.