

ОиАС-4
.pdf1 |
|
Лекция 4 |
|
|
|
|
|
|

Пример 2.2.1. Построение оптимального по расходу топлива управления.
Рассмотрим объект управления, описываемый уравнениями
x1 x2
x2 x1 u
Пусть на управление наложено ограничение
|u(t)| 1.
Функционал оптимизации, выражающий расход топлива, имеет вид
t1
J u t dt
t0
Заданы начальное состояние
x1(t0) = x10; x2(t0) = x20
и условие в момент времени t1
x1(t1) = x2(t1) = 0.
(2.2.26)
(2.2.27)
(2.2.28)
(2.2.29)
(2.2.30)
Требуется найти u(t), при котором объект (2.2.26) переходит из состояния (2.2.29) в состояние (2.2.30), при этом выполняются ограничения (2.2.27), а функционал (2.2.28) принимает наименьшее значение.
2
Переходя к определению оптимального управления на основе принципа максимума, сформируем гамильтониан
H = –|u| + ψ1(t) х2 + ψ2(t) (–x1
уравнения для вспомогательных переменных
|
|
|
H ; |
|
|
1 |
|
x1 |
|
|
|
2 |
|
|
|
|
|
H . |
|
|
2 |
|
x2 |
1 |
|
|
|
||
Управление u(t), доставляющее максимум функции
|
0, |
если |
|
2 t |
|
1; |
||||
|
|
|
||||||||
u t |
1, |
если |
2 |
t 1; |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
1, если |
|
t 1. |
|||||||
|
|
|
|
|
|
|
2 |
|
|
|
+ u) |
(2.2.31) |
(2.2.32)
(2.2.31), определяется как
(2.2.33)
Уравнения (2.2.26), (2.2.32), (2.2.33) составляют краевую задачу. Переходя к ее исследованию, запишем решение системы (2.2.32):
ψ1(t) = –a cos(t + α); ψ2(t) = a sin(t + α), |
(2.2.34) |
где а>0; 0 α 2π – неизвестные числа, которые необходимо определить так,
чтобы управление (2.2.33) привело объект (2.2.26) в состояние (2.2.30). Найдем
3
решение системы (2.2.26) при u = 0, u = 1, u = –1.
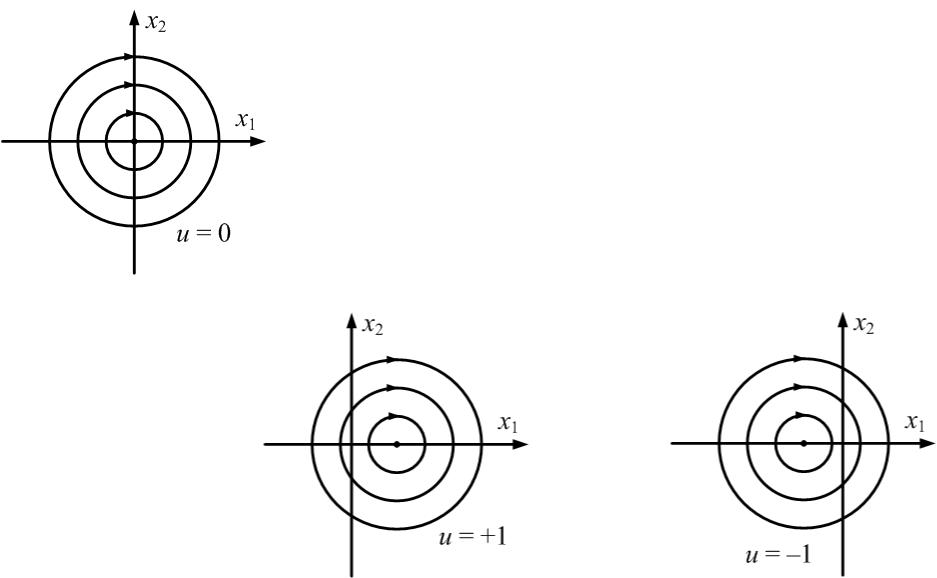
В первом случае решение этой системы имеет вид x1=–R cos(t + β), x2=R sin(t + β). Оно зависит от постоянных R и β при этом R > 0, 0 β 2π. Фазовые траектории этой системы представляют собой окружности с центром в начале координат.
Фазовые траектории системы (2.2.26) при u= + 1 и u = –1 также являются окружностями, центры которых расположены в точках (1,0) (–1, 0)
соответственно.
4
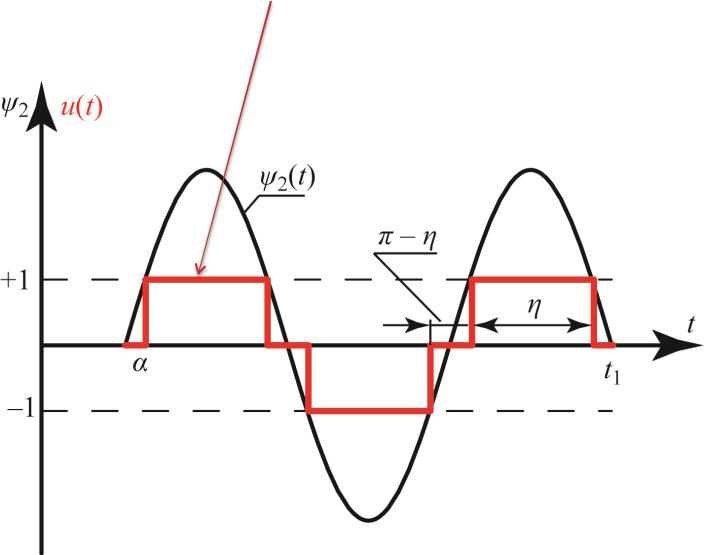
Пусть некоторым оптимальным управлениям u(t) объект (2.2.26) переводится из начального состояния (x10, х20) в начало координат. Тогда на последнем участке оптимальной траектории управление u(t) равно +1 либо –1. Для определенности будем полагать, что оптимальное управление имеет вид, изображенный на рисунке.
5
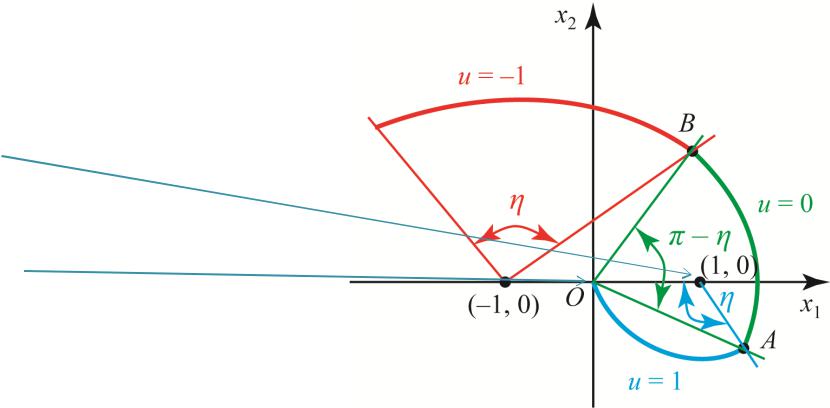
В этом случае последний участок фазовой траектории представляет собой дугу величиной η с центром в точке (1, 0) . Управление u(t)=0 при
t [t1 – π; t1 – η], и поэтому соответствующий участок фазовой
траектории является дугой с центром в точке (0, 0) и центральным углом
π – η.
В точке А происходит переключение управления u(t)=0 на u(t) = l, а в точке В – с u(t)=–1 на u(t)=0. Задаваясь различными значениями чисел α и а, получим различные числа η. Строя для каждого числа η траекторию методом «попятного движения, определяем, «попал» ли левый конец этой траектории в точку (x10, х20). Пусть для некоторого η траектория ОАВ прошла через точку (x10, х20). Для такого числа η нетрудно определить числа α и а, а через них начальные условия ψ10, ψ20, которые и разрешают краевую задачу.
6

Задача с подвижными концами и нефиксированным временем
7
Пусть в задаче об оптимальном программном управлении начальное (2.2.3) и конечное (2.2.4) состояния не фиксированы (a t0 и t1 заданы) и могут перемещаться по поверхностям:
•левый конец траектории xi(t) (i=l, …, n) по поверхности υ01(х(0), t0)=0,
•правый – по поверхности υ11(х(1), t1)=0.
Теорема 2.2.2 (принцип максимума) в этом случае в основном сохраняется (так как управление, оптимальное при подвижных концах траектории xi(t) (i=l, …, n), является оптимальным и в частном случае, когда концы закреплены), однако 2n граничных условий для системы (2.2.24), (2.2.25), решения которой содержат 2n произвольных постоянных, определяются из условий трансверсальности:
|
V |
|
|
V |
|
|
|
|
(2.2.35) |
|
i t0 |
; |
i t1 |
i |
1, n |
||||||
xi 0 |
xi 1 |
|
||||||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
s |
s p |
|
|
|
|
|
V x t0 , x t1 , g g0 0 g j j 0 |
gi i1 |
|||||
|
|
|
|
|
|
|
|
j 1 |
i s 1 |
|
Если один из концов траектории x(t), например правый, закреплен, то граничные условия имеют вид
x t x ; |
|
|
t |
|
V |
|
i |
|
|
|
||||||||
|
1, n |
(2.2.36) |
||||||||||||||||
|
xi 0 |
|||||||||||||||||
i 1 |
|
i 1 |
|
i |
0 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
В случае нефиксированного времени, т.е. когда моменты t0 |
и t1 не заданы, |
|||||||||||||||||
добавляются еще два условия трансверсальности: |
|
|||||||||||||||||
H |
|
|
|
V |
; H |
|
|
|
|
V |
|
|
|
(2.2.37) |
||||
|
|
|
|
|
|
|
|
|||||||||||
|
|
t0 |
|
|
|
t0 |
|
|
|
|||||||||
|
t t0 |
|
t t1 |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
8
Пример 2.2.2. Определить оптимальное управление в следующей задаче оптимального управления:
x1 |
x2 ; |
|
u |
|
a; |
|
x1 0 x2 0 0; |
x2 10 0; |
|
J x1 10 min |
||||||
|
|
|
|
|||||||||||||
x2 |
u; |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Решение. Функция H и сопряженные уравнения имеют вид |
||||||||||||||||
|
|
|
|
|
|
|
|
H 1 x2 |
2u |
|
|
|
|
|
||
|
|
|
|
|
|
H 0; |
|
H |
|
|
|
|||||
|
|
|
|
|
|
1 |
|
x1 |
|
2 |
x2 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Терминант и условия трансверсальности имеют вид |
||||||||||||||||
|
|
|
V g0 0 x1 10 ; |
1 10 |
V |
|
|
|
1 |
|||||||
|
|
|
|
|
|
|
||||||||||
|
|
|
x1 10 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Решив сопряженные уравнения и учитывая условия трансверсальности, находим |
||||||||||||||||
|
|
|
|
|
|
|
|
1 1; 2 C2 t |
|
|
|
|
||||
В условии |
|
|
|
|
|
max H x, , |
0 ,u 1 x2 max 2u |
|||||||||
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
u U |
|
|
|
|
|
u U |
|
||
максимум достигается, когда управление принимает граничные значения и его
знак совпадает со знаком функции ψ2, т.е. при u = аsignψ2.
9

Так как знак линейной функции может измениться только один раз, то оптимальным может быть управление
|
|
a, 0 t ts ; |
|||
|
u |
|
|
|
|
|
a, ts |
t 10, |
|
||
или |
момент изменения знака функции ψ2 |
||||
|
|
|
|||
a, 0 |
t ts ; |
||||
|
|||||
|
u |
a, ts |
t 10 |
||
|
|
||||
В частности, если ts = 10, то это значит, что функция ψ2 на интервале [0,10] не меняет знака, и управление не переключается. Выбор из двух управлений можно сделать исходя из того, какое из этих управлений обеспечивает выполнение граничных условий. Но в данном примере этот выбор можно сделать на оснований физических соображений. По условию задачи нужно повернуть вал двигателя на максимальный угол и остановить его за заданное время. Поэтому оптимальным может быть только первое из двух приведенных управлений. Остается определить только момент ts переключения управления.
10