

3.6 Электромагнитный момент асинхронной машины.
Воспользуемся Г-образной схемой замещения, найдем
Так
как мощность электрических потерь в
роторе ![]() следует, что
следует, что

где
![]() число
фаз статора;
число
фаз статора; ![]() число
фаз ротора
число
фаз ротора
Поставляя
значение тока ![]() получаем:
получаем:
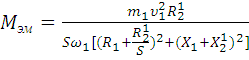 (1)
(1)
Рассматривая
идеальную машину, можно пренебречь
механическими потерями, считать, что
![]() равен M
– моменту на валу машины.
равен M
– моменту на валу машины.
Преобразование энергии в электрических машинах происходит в воздушном зазоре, где сосредоточена энергия магнитного поля, электромагнитный момент приложен к зубцами статора и ротора.
На
(Рис. 3.13) по (1) построена характеристика
M=f(S)
при![]()

Рисунок
3.13 Зависимость ![]()
Важной
характеристикой электрической машины
является механическая характеристика.
Механическая характеристика представляет
собой зависимость M=f![]() или M=f(
или M=f(![]() )
или наоборот
)
или наоборот ![]()
Так
как S=![]() следовательно приведенный график
по виду будут походить на механическую
характеристику. Поэтому в учебнике
«Электрические машины» Копылов Игорь
Петрович называет M=f(S)-
механической характеристикой.
следовательно приведенный график
по виду будут походить на механическую
характеристику. Поэтому в учебнике
«Электрические машины» Копылов Игорь
Петрович называет M=f(S)-
механической характеристикой.
Механическая
характеристика представленная на
рисунке охватывает все режимы работы
асинхронной машины. Согласно (1) M=0
при S=0
и S=![]() .
Момент имеет максимум при S=
.
Момент имеет максимум при S=![]() т. е. при критическом скольжении. При
увеличения скольжения от 0до ±
т. е. при критическом скольжении. При
увеличения скольжения от 0до ±![]() момент по абсолютной величине растет,
а затем уменьшается. При этом
момент по абсолютной величине растет,
а затем уменьшается. При этом ![]() продолжает расти, но растет реактивная
составляющая, а активная составляющая
тока
продолжает расти, но растет реактивная
составляющая, а активная составляющая
тока ![]() уменьшается. За счет увеличения тока
уменьшается. За счет увеличения тока
![]() уменьшается ЭДС и поток машины.
уменьшается ЭДС и поток машины.
Можно
определить ![]() приравняв
приравняв
![]() при этом получается
при этом получается 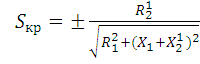
Поставляя
значение ![]() определим для многополюсной машины.
определим для многополюсной машины.
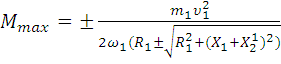 (2)
(2)
Знак «+» относиться к двигательному, а знак «-» к генераторному режимам.
Для
асинхронных машин единых серий и
асинхронных машин большой мощности
можно считать, что ![]() тогда
тогда ![]() где
где ![]() а
а ![]()
Как
следует из (2) максимальный момент в
генераторном режиме несколько больше,
чем в двигательном. Кратность
максимального момента асинхронного
двигателя: ![]() большее
значение принадлежат двигателю с меньшим
числом полюсов.
большее
значение принадлежат двигателю с меньшим
числом полюсов.
При
изменении ![]() максимальный момент не изменяется, а
смещается в область больших значений
S.
При необходимости улучшение пусковых
свойств асинхронного двигателя можно
примененить ротор с пазом специального
профиля, в которых происходит нелинейное
изменение
максимальный момент не изменяется, а
смещается в область больших значений
S.
При необходимости улучшение пусковых
свойств асинхронного двигателя можно
примененить ротор с пазом специального
профиля, в которых происходит нелинейное
изменение ![]() при вытеснение тока в пазах. Например,
ротор с глубокими пазами, когда беличья
клетка выполняется из стержней
прямоугольного сечения (а), с двойной
беличьей клеткой (б) (Рис. 3.14).
при вытеснение тока в пазах. Например,
ротор с глубокими пазами, когда беличья
клетка выполняется из стержней
прямоугольного сечения (а), с двойной
беличьей клеткой (б) (Рис. 3.14).
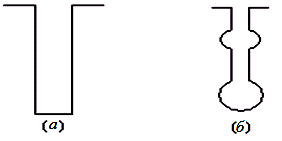
Рисунок 3.14 Пазы ротора асинхронного двигателя с улучшенными пусковыми свойством а) - глубокие пазы; б) двойная беличья кладка.
Выражение (1) для определения механической характеристики асинхронного двигателя громоздкое и для упрощенных расчетов неудобное. Немецким ученым М. Клоссом была предложена простая формула для описания механической характеристики асинхронного двигателя.
 ;
; ![]()
По
формуле Клосса м. х. M=f(S)
может быть построена с погрешностью
![]()
Во многих электроприводах желательно иметь пусковой момент асинхронного двигателя близкий к максимальному. Это обеспечивает механическая характеристика с повышенным сопротивлением в цепи ротора (Рис. 3.15).
Однако в номинальном режиме при такой механической характеристике (1) двигатель будет работать при большом скольжении, что связано с большими габаритами, потерями, низкими энергетическими показателями. Поэтому асинхронный двигатель с такой характеристикой используется редко. Двигателей единых серий имеют механические характеристики вида (2), обеспечивающие высокие энергетические показатели, когда.
![]()
Из
анализа механических характеристик
(Рис. 3.15) следует, что наиболее благоприятной
механической характеристикой была бы
характеристика, сочетающая свойства 1
и 2. Такой возможностью обладают
асинхронные двигатели с фазным ротором,
в которых имеется возможность включения
в цепь ротора дополнительного сопротивления
при пуске и закорачивания этого
сопротивления при работе в номинальном
режиме. Двигатель с фазным ротором более
дорогие и выпускаются для электроприводов
с тяжелыми условиями пуска. При подключении
добавочного резистора к вторичной
обмотке, установившееся значение
пускового момента соответствует ![]() и равно
и равно

Пусковой
момент пропорционален квадрату напряжения
и зависит от ![]() Смещая
Смещая ![]() за счет увеличения
за счет увеличения ![]() можно получить
можно получить ![]() это имеет место при
это имеет место при ![]() .
.
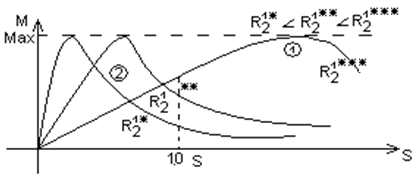
Рисунок 3.15 Механические характеристики асинхронного двигателя при различных сопротивлениях цепи ротора
Для
устойчивой работы двигателя важное
значение имеет перегрузочная способность
двигателя. При колебаниях напряжение
сети и момента нагрузки двигатель
продолжает работать если имеется запас
статистической устойчивости, определенный
коэффициентом перегрузочной способности
![]() который в двигателях общепромышленного
исполнения равен 1,7-2,2.
который в двигателях общепромышленного
исполнения равен 1,7-2,2.