

2 Вывод формулы для пошагового вычисления
УГЛОВОЙ СКОРОСТИ ЗВЕНА ПРИВЕДЕНИЯ
Рассмотрим только установившееся движение, при котором скорости звеньев и кинематическая энергия машины периодически изменяются. В начале и в конце каждого цикла они имеют одинаковые значения. Время цикла равно времени одного оборота кривошипа: периоду изменения производственного сопротивления.
Заданы номинальная nДв= 2880 об/мин и синхроннаяпсх = 3000 об/мин частоты вращения ротора асинхронного электродвигателя; массы, моменты инерции и размеры звеньев; диаграмма изменения производственного сопротивления. Момент двигателя на рабочем участке его механической характеристики линейно зависит от частоты вращения (угловой скорости).
Требуется найти зависимость угловой
скорости звена приведения от координаты
![]() ,
определяющей его положение; в случае
необходимости определить момент инерции
маховика; определить приближенное
значение мощности, развиваемой двигателем
без учета потерь на трение.
,
определяющей его положение; в случае
необходимости определить момент инерции
маховика; определить приближенное
значение мощности, развиваемой двигателем
без учета потерь на трение.
Звенья механизмов считаем абсолютно твердыми телами, зазорами в кинематических парах пренебрегаем. Тогда машинный агрегат можно считать машиной, число степеней свободы которой равно единице и для которой можно записать дифференциальное уравнение движения:
![]() ,
(10)
,
(10)
где
![]() – приведенный момент инерции машины;
– приведенный момент инерции машины;![]() – приведенный момент движущих сил и
модуль приведенного момента сил
сопротивления;
– приведенный момент движущих сил и
модуль приведенного момента сил
сопротивления;![]() –
угол поворота и угловая скорость звена
приведения.
–
угол поворота и угловая скорость звена
приведения.
Преобразуем уравнение, умножив
все слагаемые на
![]()
![]() :
:
![]() .
(10,а)
.
(10,а)
Независимой переменной в этом уравнении
является координата
![]() .
Её бесконечно малое приращение
.
Её бесконечно малое приращение![]() при численном интегрировании уравнения
заменим малым конечным изменением
при численном интегрировании уравнения
заменим малым конечным изменением![]() – шагом интегрирования.
– шагом интегрирования.
Переменные конечные величины
![]() в уравнении (10,а) на каждомi-ом
шаге вычислений будем считать постоянными
и равными их значениям в начале шага:
в уравнении (10,а) на каждомi-ом
шаге вычислений будем считать постоянными
и равными их значениям в начале шага:
![]() .
.
Бесконечно малые приращения dIпр
и![]() заменим малыми разностями, соответствующими
изменению
заменим малыми разностями, соответствующими
изменению![]() :
:
![]() .
.
Индекс
![]() показывает, что данная величина
определяется в начале следующего шага.
показывает, что данная величина
определяется в начале следующего шага.
После всех этих замен выразим значение угловой скорости в начале следующего шага
![]() .
(11)
.
(11)
Формула (11) используется для
пошагового вычисления угловой скорости.
В качестве начального звена машины
выберем кривошип 1 рычажного механизма.
Шаг изменения угла поворота кривошипа
![]() .
Для вычисления необходимо найти значения
.
Для вычисления необходимо найти значения![]() .
Скорость
.
Скорость![]() определена на предыдущем шаге расчётов.
определена на предыдущем шаге расчётов.
3 Определение приведенного момента инерции
Приведенный момент инерции машины определяется по формуле
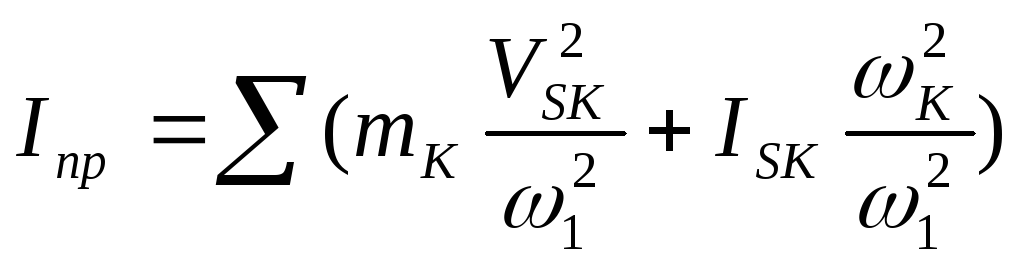 ,
(12)
,
(12)
где mK,VSK– масса и скорость центра масск-того
звена;ISK,![]() – момент инерции относительно оси,
проходящей через центр масс, и угловая
скорость звена;
– момент инерции относительно оси,
проходящей через центр масс, и угловая
скорость звена;![]() – угловая скорость кривошипа.
– угловая скорость кривошипа.
Величину
![]() Inp, будем искать как сумму приведенных
моментов инерции зубчатого и рычажного
механизмов
Inp, будем искать как сумму приведенных
моментов инерции зубчатого и рычажного
механизмов![]() .
Приведенный момент инерции зубчатого
механизма определяется по формуле
.
Приведенный момент инерции зубчатого
механизма определяется по формуле
 (13)
(13)
Скорости звеньев редуктора при заданной номинальной частоте вращения двигателяnДвопределены в пункте 1 пояснительной записки. Подставляя в формулу (13) значения, находим
Отношения скоростей звеньев зубчатого
механизма не зависят ни от положения,
ни от величины скоростей, поэтому
приведенный момент
![]() является величиной постоянной.
является величиной постоянной.
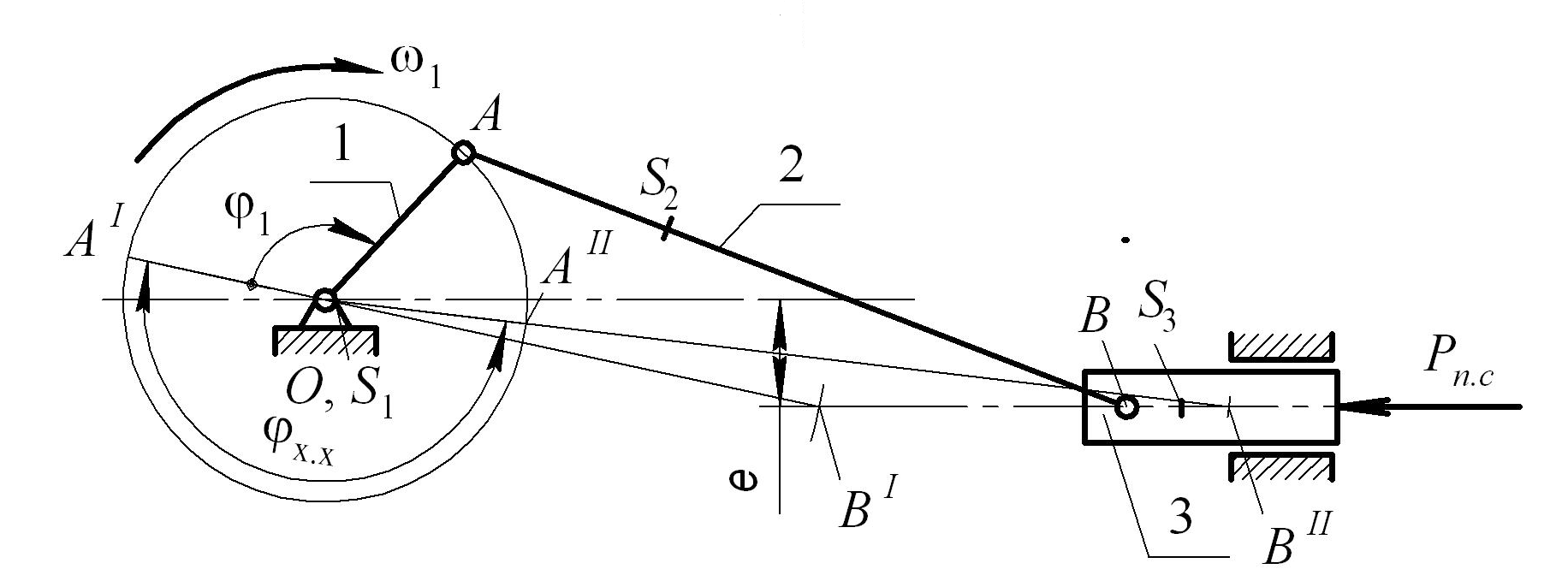
Рисунок 2 – Схема рычажного механизма
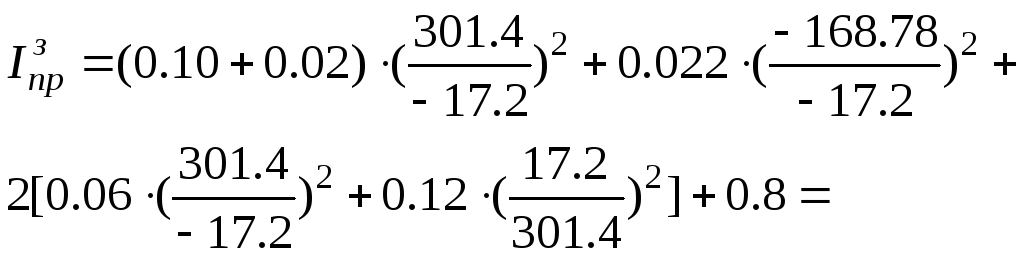
Приведенный момент инерции рычажного механизма определяется по формуле:
![]() (14)
(14)
В рычажном механизме отношения
скоростей звеньев изменяются от положения
к положению. Поэтому момент
![]() – величина переменная, зависит от угла
поворота кривошипа
– величина переменная, зависит от угла
поворота кривошипа![]() ,
однако не зависит от величины скоростей.
,
однако не зависит от величины скоростей.
Отношения скоростей точек и звеньев
рычажного механизма на каждом шаге
![]() изменения угла поворота кривошипа
определяются по результатам кинематического
исследования на компьютере. Поэтому
для вычисления
изменения угла поворота кривошипа
определяются по результатам кинематического
исследования на компьютере. Поэтому
для вычисления![]() в компьютер достаточно ввести массы,
моменты инерции и размеры звеньев.
в компьютер достаточно ввести массы,
моменты инерции и размеры звеньев.