

ω0max |
ω |
|
uзс |
= uзсmax |
|
ωmax |
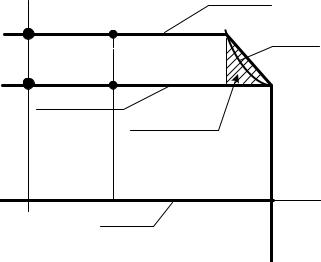
ω= f (M) |
||
|
|
|
|
|
ω0н |
|
|
ωн |
|
|
|
|
|
|
|
|
uзс = uзсн |
Зона регулируемого |
|
|
|
|
|
|
|
|
|
токоограничения |
|
0 |
|
|
Iн |
Ia (M) |
|
|
|
uзс = 0 |
|
|
|
|
|
Imax (Мmax ) |
Рис.7.8. Электромеханические (механические) характеристики в |
||||
|
двухзонной СУЭП с ПИ регулятором скорости |
|||
7.2. Настройка системы регулирования скорости по цепи возбуждения
На основании структурной схемы объекта регулирования (рис.7.3), система регулирования скорости изменением магнитного потока строится по принципу систем подчиненного регулирования и состоит из внутреннего контура регулирования тока возбуждения (магнитного потока) электродвигателя и внешнего контура регулирования ЭДС. В первой зоне регулирования (скорость электродвигателя меньше или равна номинальной) система регулирования ЭДС стабилизирует ток возбуждения (магнитный поток) электродвигателя на уровне номинального (регулятор ЭДС находится в ограничении). Во второй зоне регулирования (скорость электродвигателя выше номинальной) регулятор ЭДС выходит из ограничения и начинает стабилизировать ЭДС электродвигателя на номинальном уровне снижением тока возбуждения (магнитного потока) при увеличении скорости вращения электропривода. Рассмотрим поконтурную настройку системы регулирования ЭДС электродвигателя.
260
7.2.1. Настройка контура регулирования тока возбуждения (магнитного потока)
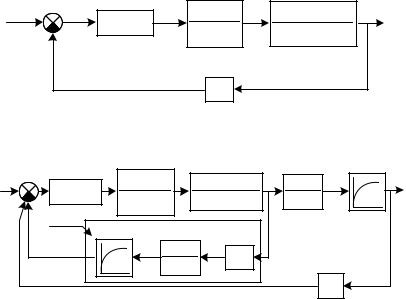
Контур регулирования тока возбуждения (магнитного потока) является внутренним контуром регулирования. Структурная схема контура регулирования тока возбуждения представлена на рис.7.9. В контур регулирования тока возбуждения входят регулятор тока возбуждения РТВ, тиристорный возбудитель ТВ с коэффициентом
передачи kв и минимальной постоянной времени Tµв , объект
регулирования (обмотка возбуждения) ОВ и цепь отрицательной обратной связи по току возбуждения с безинерционным датчиком тока возбуждения ДТВ.
Коэффициент пропорциональности между током возбуждения и напряжением uотв обратной связи по току возбуждения (напряжением
задания тока возбуждения uзтв ) получил название коэффициента
обратной связи по току возбуждения:
kотв |
= |
uотвmax |
= |
uзтвmax |
= |
(8 -10)В |
, |
(7.4) |
|
|
|||||||||
|
|||||||||
Iвmax |
Iвmax |
|
|||||||
|
|
|
|
Iвн |
|
||||
где Iвmax = Iвн - максимальное |
значение |
тока возбуждения, |
обычно |
||||||
принимаемое за номинальное, т.к. в большей величине тока возбуждения нет необходимости; А.
Тиристорный возбудитель ТВ выбирается с учетом обеспечения максимального быстродействия контура регулирования тока возбуждения (потока) с коэффициентом форсировки α = 2…4, для чего применяют ТВ с максимально возможным выпрямленным напряжением
440 – 460 В.
261
uзтв |
|
РТВ |
Uув |
|
ТВ |
Edв |
ОВ |
Iв |
|
Wртв (p) |
|
kв |
Ткр +1 |
||||
|
|
|
Тµвр +1 |
Rв (ТвΣр +1) |
|
|||
|
|
|
|
|
||||
|
uотв |
|
|
|
ДТВ |
|
|
|
|
|
|
|
|
kотв |
|
|
|
|
|
|
|
|
а) |
|
|
|
uзп |
РП |
ТВ |
Edв |
|
Iв |
|
kФ |
|
kв |
|
|
Ткр +1 |
1 |
||||
|
Wрп (p) |
|
|
|
|
|||
|
Тµвр +1 |
Rв (ТвΣр +1) |
Ткр +1 |
|
||||
|
uопДМП |
|
||||||
|
ФП |
Ф |
|
ДТВ |
|
|
|
|
|
|
|
1 |
|
kотв |
|
|
|
|
uоф |
|
Ткр +1 |
|
|
|||
|
|
|
|
kоф |
|
|||
|
|
|
|
|
б) |
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.7.9. Структурная схема контура регулирования тока |
|||||||
|
возбуждения (а) и магнитного потока (б) |
|
||||||
Объектом регулирования в контуре регулирования тока возбуждения является обмотка возбуждения с передаточной функцией
Wор1(p) = |
Tкp +1 |
, |
(7.5) |
|
Rв (TвΣp +1) |
||||
|
|
|
где Tк - электромагнитная постоянная времени контура вихревых токов, с;
TвΣ = Tов + Lтв / Rтв + Tк ≈ Tов + Tк - |
суммарная |
электромагнитная постоянная времени цепи возбуждения, с;
Tов - электромагнитная постоянная времени обмотки возбуждения,
с;
262
Lтв - индуктивность тиристорного возбудителя, Гн;
Rтв - активное сопротивление тиристорного возбудителя, Ом;
Rв = Rов + Rтв ≈ Rов - активное сопротивление цепи возбуждения, Ом;
Rов - активное сопротивление обмотки возбуждения, Ом.
Электромагнитная постоянная времени обмотки возбуждения двигателя рассчитывается по формуле:
|
L |
ов |
|
2p |
w2 |
dФ Ф |
н |
(σ |
н |
−1) |
|
|
||||
Tов = |
|
= |
|
п |
|
в |
|
|
+ |
|
|
, |
(7.6) |
|||
R |
ов |
R |
ов |
a2 |
|
dF |
|
F |
|
|||||||
|
|
|
|
в |
|
|
|
|
н |
|
|
|
||||
где pп – число пар главных полюсов электродвигателя,
aв – число параллельных ветвей обмотки возбуждения;
Rов - активное сопротивление обмотки возбуждения, приведенное к рабочей температуре, Ом;
Фн ,Fн – номинальный магнитный поток и намагничивающая сила, приходящиеся на один главный полюс двигателя, соответственно, Вб, А;
σн =(1,1…1,2) – коэффициент рассеяния;
wв – число витков обмотки возбуждения, приходящееся на один главный полюс электродвигателя.
При учете контура вихревых токов постоянная времени Tк принимается равной:
Tк = (0,1...0,15)Tов . |
(7.7) |
Если подойти к настройке контура регулирования тока возбуждения так же, как это рассматривалось при реализации контура регулирования якорного тока в 5.1, то в этом случае передаточная
263
функция регулятора тока возбуждения будет определяться в соответствии со структурной схемой на рис.7.9,а выражением:
Wртв (p) = |
TВ ∑p +1 |
|
1 |
|
. |
(7.8) |
||
2T |
kвkотв |
p |
|
T p |
+1 |
|||
|
|
|
|
|||||
|
|
|
к |
|
|
|
||
|
µв RВ |
|
|
|
|
|
|
|
При получившейся передаточной функции (7.8) затрудняется техническая реализация как самого регулятора тока возбуждения, так и контура регулирования ЭДС.
Поэтому на практике поступают следующим образом: в цепь обратной связи по току возбуждения вводят фильтр Ф с постоянной
времени контура вихревых токов Tк и нелинейный элемент
(функциональный преобразователь) ФП, моделирующий кривую намагничивания двигателя (рис.7.9,б) (данные элементы образуют датчик магнитного потока ДМП). В этом случае сигнал обратной связи с выхода ФП оказывается пропорциональным величине магнитного потока двигателя, что позволяет перейти к регулированию магнитного потока
(обратная связь с коэффициентом kоф по величине магнитного потока
показана пунктирной линией на рис.7.9,б) и регулятор тока возбуждения становится регулятором магнитного потока.
Коэффициент обратной связи по магнитному потоку рассчитывается по следующему выражению:
kоф = |
uофmax |
= |
(8 −10)В |
. |
(7.9) |
|
kФн |
kФн |
|||||
|
|
|
|
Поскольку магнитный поток при регулировании изменяется от номинального значения до минимального, то для упрощения реализации регулятора потока можно линеаризовать кривую намагничивания
двигателя, введя коэффициент линеаризации kf , равный:
kf = |
∆(kФ) |
= |
k(Фн −Фmin ) |
, |
(7.10) |
|
∆Iв |
Iвн − Iв min |
|||||
|
|
|
|
|||
|
264 |
|
|
|
||
где Iвн ,Фн - номинальный ток возбуждения и соответствующий ему магнитный поток, А, Вб;
Iвmin ,Фmin - минимальный ток возбуждения и соответствующий ему магнитный поток, А, Вб.
Тогда передаточная функция регулятора тока возбуждения (регулятора магнитного потока) будет иметь следующий вид:
Wрп (p) = |
|
TВ ∑p +1 |
. |
(7.11) |
||
2T |
|
kвkf kоф |
p |
|||
|
|
|
|
|||
|
|
|
|
|||
|
µв |
RВ |
|
|
||
|
|
|
|
|
||
Т. е. регулятор получился пропорционально – интегральным, реализация которого не вызывает затруднения. В этом случае на МО настраивается контур регулирования магнитного потока, следовательно, магнитный поток будет иметь оптимальный переходный процесс для первого контура регулирования в соответствии с таблицей 1.
Если принять коэффициенты пропорциональности kf и обратной связи по потоку kоф равными следующим выражениям:
kоф = |
Uоф max |
; kf = |
kФ |
н , |
kФн |
|
|||
|
|
Iвн |
||
то в этом случае их произведение равно значению коэффициента обратной связи по току возбуждения:
kофkf |
= |
Uоф maxkФн |
= |
(8 −10)В |
= kотв , |
(7.12) |
|
kФнIвн |
Iвн |
||||||
|
|
|
|
|
и передаточная функция регулятора тока возбуждения (7.11) будет
равна:
265
|
|
|
|
Wрп (p) = |
TВ |
∑p + |
1 |
. |
(7.13) |
||
|
|
|
|
2T |
kвkотв p |
||||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
µв |
RВ |
|
|
|
|
При реализации контура регулирования тока возбуждения (потока) |
||||||||||
необходимо предусмотреть меры по предотвращению снижения тока |
|||||||||||
возбуждения меньше минимального значения. |
|
|
|
||||||||
|
Пример 19. Реализовать функциональный преобразователь в цепи |
||||||||||
обратной связи по току возбуждения, моделирующий кривую |
|||||||||||
намагничивания электродвигателя (рис.7.9,б). |
|
|
|
||||||||
|
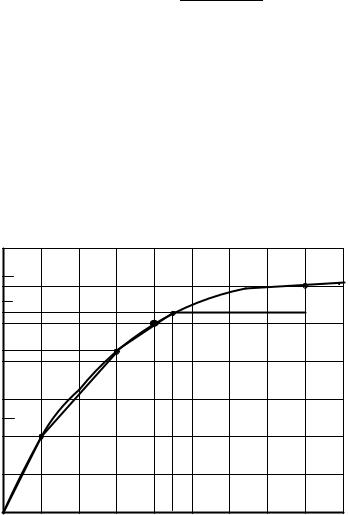
За исходную характеристику принимается кривая намагничивания |
||||||||||
электродвигателя |
Ф = f(Iв ) , |
приведенная |
в |
паспортных |
данных |
||||||
электродвигателя и представленная на рис.7.10 пунктирной линией. |
|||||||||||
|
uфп |
Ф |
|
|
|
|
|
|
|
|
|
8,6 |
8 |
Фн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
6,9 |
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
3,2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Iвн |
|
|
|
|
|
|
2 |
4 |
6 |
8 |
|
10 |
|
|
uвх (Iв ) |
|
|
|
|
|
|
|
9,2 |
|
|
|
|
|
|
|
Рис.7.10. Линейная аппроксимация кривой намагничивания для |
|||||||||
|
|
|
|
реализации датчика потока |
|
|
|
||||
266

Принимается номинальное значение входной величины датчика потока (выход датчика тока возбуждения) равное 8В при номинальном токе возбуждения. При этом выходное напряжение датчика потока, соответствующее номинальному магнитному потоку, также принимается равным 8В. Выполняется кусочно - линейная аппроксимация кривой намагничивания с ограничением максимального выходного напряжения на уровне 8,6В (конечная точка третьего участка). При этом получилось четыре участка характеристики датчика магнитного потока.
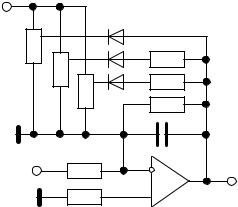
В соответствии с числом участков характеристики рис.7.10 (четыре участка) составляется принципиальная электрическая схема датчика потока (функционального преобразователя), реализованного на ОУ и представленная на рис.7.11.
Для запирания диодов в цепи обратной связи ОУ применяется отдельный источник питания Uип2 гальванически развязанный от источника питания ОУ.
Рассчитываются коэффициенты передачи на каждом из участков характеристики рис.7.10 для точек сопряжения прямых:
k1 = 32,2 =1,6; k2 = 6,69 −−32,2 = 0,9; k3 = 89,6,2−−66,9 = 0,53.
Затем задаются величиной сопротивления входного резистора R29 = 100 кОм и рассчитываются величины сопротивлений резисторов в цепи обратной связи ОУ:
267
+Uип2 |
|
|
|
R25 |
VD 3 |
|
|
VD 2 |
R32 |
||
|
|||
R26 |
VD1 |
R31 |
|
|
R27 |
R30 |
|
|
|
||
от ип2 |
|
С10 |
|
- uвх |
R29 |
uфп |
|
R28 |
|||
|
|
DA15
Рис.7.11. Принципиальная электрическая схема функционального преобразователя
R30 |
= k1 R29 |
=160кОм R31 = |
k1k2 |
R29 = 205кОм |
|
|
|||||
|
|
|
|
k1 − k2 |
|
R32 |
= |
k2k3 |
R29 =119кОм |
|
|
k2 − k3 |
|
|
|||
|
|
|
|
|
|
Исходя из стандартного ряда Е24, величины сопротивлений резисторов принимаются равными: R30=160 кОм, R31=200кОм,
R32=120кОм.
Величина емкости конденсатора C10 находится из равенства R30C10 = Tк , где Tк – постоянная времени контура вихревых токов.
Величины сопротивлений потенциометров R25 – R27 принимаются на порядок меньшими, чем величины сопротивлений
R31, R32, поэтому выбираются R25 = R26 = R27 = 20 кОм, типа СП5 - 2В, рассеиваемой мощностью 0,5 Вт и допуском ±5%, остальные
резисторы общего назначения типа МЛТ рассеиваемой мощностью 0,125 Вт допуском ±5%. Диоды VD1 – VD3 выбираются типа Д105, т.е. маломощные с малым обратным током величиной 0,005мА и напряжением 75 В.
На потенциометрах R27, R26, R25 выставляются значения напряжений, при которых происходит открывание диодов в
268

соответствии с реализуемой кривой (рис.7.11), т.е. 3,2В; 6,9В и 8,6В соответственно. После открывания диода VD3 происходит ограничение выходного напряжения ОУ на уровне 8,6В (коэффициент передачи равен нулю).
Контрольные вопросы:
1.В каких случаях применяют систему двухзонного регулирования скорости?
2.Как строится СУЭП двухзонного регулирования скорости, как осуществляется взаимосвязь между системами регулирования?
3.Поясните структурную схему объекта регулирования в двухзонной СУЭП.
4.Выведите передаточную функцию регулятора скорости в двухзонной СУЭП?
5.Почему необходимо изменять величину коэффициента усиления регулятора скорости во второй зоне регулирования?
6.Как выполняется адаптация регулятора скорости во второй зоне регулирования?
7.С какой целью осуществляется регулируемое токоограничение в данной СУЭП, как оно выполняется?
8.Как реализуется операция деления в регуляторе скорости с помощью множительного устройства?
9.Поясните вид электромеханических и механических характеристик в однократной системе регулирования, в чем их отличие?
10.Поясните вид электромеханических и механических характеристик в двукратной системе регулирования, в чем их отличие?
11.С какой целью в цепь обратной связи по току возбуждения включают фильтр и функциональный преобразователь?
12.Нарисуйте структурную схему контура регулирования тока возбуждения (магнитного потока).
13.Почему при реализации контура регулирования тока возбуждения переходят к регулированию магнитного потока?
14.Выведите передаточную функцию регулятора магнитного
потока.
15.Как реализуется функциональный преобразователь на операционном усилителе?
269