

9.Какие звенья входят в контур регулирования тока якоря?
10.Как правильно рассчитать коэффициент обратной связи по
току?
11.Выведите передаточную функцию регулятора тока.
12.Как реализовать регулятор тока на операционном усилителе?
13.Почему коэффициенты передачи регулятора тока по входу задания и входу обратной связи по току принимают равными?
14.Чему равны коэффициент усиления и постоянная времени интегрирования регулятора тока?
15.За счет чего происходит «компенсация» постоянной времени
Tэ ?
5.1.1.Динамические свойства контура регулирования тока якоря
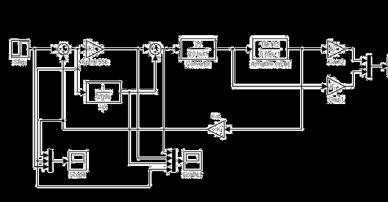
Рассмотрим динамические свойства контура регулирования якорного тока, настроенного на модульный оптимум, для параметров, рассчитанных в примере 5, для чего выполним моделирование контура тока с применением пакета Matlab – Simulink. Схема модели представлена на рис.5.5, где на вход регулятора тока подается
скачкообразное задание максимального напряжения uзтmax = 10 В.
Рис.5.5. Схема модели контура регулирования якорного тока
Результаты моделирования представлены на рис. 5.6…5.9. На рис.5.6 приведены переходные процессы напряжения задания величины
якорного тока uзт = 10 В на входе пропорционально - интегрального РТ,
123
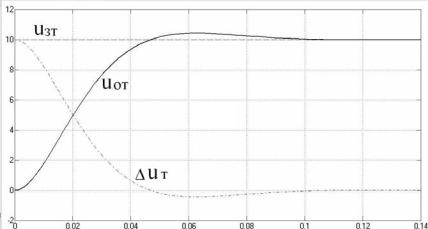
напряжения обратной связи по величине якорного тока uот = kотIa , и ошибки регулирования по току ∆uт = uзт − uот .
Как видно из рис.5.6 контур тока настроен на модульный оптимум, переходная функция uот = f(t), пропорциональная величине якорного
тока, имеет перерегулирование σ = 4,3%, время нарастания tн = 4,7*Тμ = 4,7*0,01 = 0,047 с, ошибка регулирования в статическом режиме ∆uт =
uзт − uот = 0.
На рис.5.7,а показана отработка ПИ регулятором тока скачка задания uзт = 10 В, показаны изменение во времени ошибки
регулирования на входе РТ ∆uт , пропорциональной uп и интегральной uи составляющих выходного напряжения РТ uвых = uп + uи .
Рис.5.6. Переходные процессы uзт, uот, uт = f(t) при скачке задания uзт = 10В
Как видно из рис.5.7,а пропорциональная составляющая выходного напряжения РТ повторяет ∆uт с коэффициентом передачи
kрт ( uп = kрт∆uт ), |
интегральная составляющая uи |
эквивалентна |
величине суммарной |
площади, ограниченной кривой |
∆uт и осью |
|
124 |
|

времени ( uи = |
1 |
∫t |
∆uт (t) ), после затухания переходных процессов на |
|
T |
||||
|
рт |
0 |
|
|
выходе РТ устанавливается величина такого |
выходного напряжения |
|||
uвых = uп + uи = Uу , которое обеспечивает |
необходимую выходную |
|||
ЭДС ТП Ed для поддержания в якорной цепи тока заданной величины:
uвых = uи = Uу = Ed kп = (Ia Rэ ) kп = (2,5IндвRэ ) kп .
На рис.5.7, б показаны переходные процессы относительных величин якорного тока I*a = Ia /Iндв и ЭДС тиристорного преобразователя
E*d = Ed /Edн при скачке задания uзт = 10 В на входе РТ, откуда видно, что переходный процесс тока I*a = f(t) является оптимальным и имеет
показатели оптимального контура второго порядка (таблица 1). Получение оптимального переходного процесса, зависящего только от
величины минимальной постоянной времени Tµ и не зависящего от
«большой» постоянной времени Tэ , обеспечивается примерно двукратной форсировкой выходной ЭДС ТП.
125

а)
б)
Рис.5.7. Переходные процессы в контуре тока при скачке задания uзт = 10В
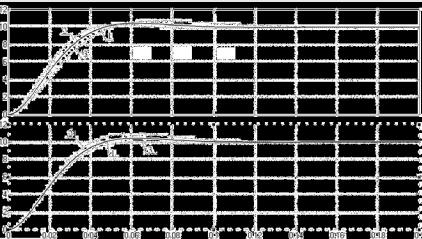
На рис.5.8 показана реакция контура регулирования якорного тока на скачек задания uзт = 10 В при отклонении параметров от расчетных на
±20%. Вверху показаны переходные процессы uот =f(t) при различных значениях коэффициента усиления РТ: кривая 1 соответствует
126
оптимальному переходному процессу ( kрт |
= kопт , Трт = Топт ); кривая 2 |
||||
соответствует |
большему |
коэффициенту |
усиления |
||
( kрт =1.2* kопт , Трт |
= Топт ); а |
кривая |
3 |
соответствует |
меньшему |
коэффициенту усиления регулятора тока ( kрт |
= 0.8* kопт , Трт = Топт ). |
||||
Ниже показаны переходные процессы uот = f(t) при различных значениях постоянной времени интегрального канала РТ : кривая 1 соответствует
оптимальному переходному процессу ( kрт = kопт , |
Трт = Топт ); кривая 2 |
||||
соответствует |
меньшему |
значению |
постоянной |
времени |
|
( kрт = kопт , Трт = 0.8* Топт ); а кривая 3 – |
|
большему |
значению |
||
постоянной времени ( kрт = kопт , Трт =1.2 * Топт ). |
|
|
|||
Рис.5.8. Реакция на скачек uзт=10В при отклонении параметров РТ от расчетных
Анализ рассмотренных переходных процессов (рис.5.8) говорит о том, что отклонение переходных процессов от оптимального является незначительным, перерегулирование не превышает 10% (σ<10%), быстродействие практически остается неизменным. Это позволяет сделать вывод о том, что контур регулирования, настроенный на модульный оптимум, является некритичным к ошибкам при расчетах параметров регуляторов в пределах ±20%, и реализации регуляторов на
127

операционных усилителях с компонентами (резисторами и конденсаторами), имеющими точность изготовления в пределах ±20%, что является одним из достоинств систем подчиненного регулирования координат с последовательной коррекцией.
На основании выражения (5.5) можно получить передаточную функцию разомкнутого токового контура, настроенного на МО, когда выходной координатой является напряжение обратной связи по току
uот , а входной – напряжение задания величины якорного тока uзт на входе РТ:
W |
(p) = uот (p) |
= |
1 |
|
= |
1 |
|
1 |
. |
(5.8) |
|
|
|
|
|
||||||||
разт |
uзт (p) |
|
2Tµp(Tµp +1) |
2Tµp Tµp +1 |
|
||||||
|
|
|
|
||||||||
Как видно из (5.8) |
передаточную |
функцию |
Wразт (p) |
можно |
|||||||
представить состоящей из передаточной функции интегрирующего звена с постоянной времени 2Tµ и апериодического звена с постоянной
времени Tµ и единичным коэффициентом передачи. Следовательно,
ЛАЧХ и ЛФЧХ разомкнутого токового контура будут равны суммам ЛАЧХ и ЛФЧХ входящих в него звеньев, т.е. интегрирующего и апериодического. При этом частота среза контура будет равна
ωст = 12Tµ , а частота сопряжения асимптот интегрирующего и
апериодического звеньев - ω1 = 1Tµ . Быстродействие контура
определяется его частотой среза, для современных электроприводов минимальная постоянная времени Tµ лежит в пределах 1.67…10.0 мс,
тогда частота среза токового контура будет находиться в пределах
303…50 с-1.
Пример 6. Построить ЛАЧХ и ЛФЧХ разомкнутого токового контура, настроенного на МО, с минимальной постоянной времени Tμ = 0,01с; определить запас по фазе.
Асимптотическая ЛАЧХ разомкнутого токового контура (5.8) определяется как сумма ЛАЧХ интегрального звена с постоянной времени интегрирования, равной 2Tμ = 0.02 с, и апериодического звена с постоянной времени Tμ = 0,01с и единичным коэффициентом передачи.
128
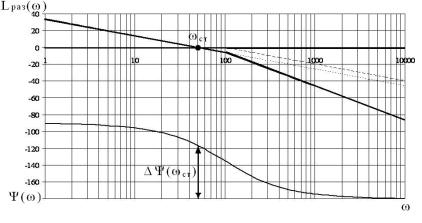
Результат построения характеристик представлен на рис. 5.9. ЛАЧХ интегрирующего звена является асимптотой с наклоном –20 дБ/дек, и частотой среза ωст = 1/2Tμ = 1/0.02 = 50с-1. Асимптотическая ЛАЧХ апериодического звена имеет асимптоту с наклоном 0 дБ/дек, совпадающую с осью частот до частоты сопряжения ω1 = 1/Tμ = 1/0.01 = 100 с-1, и асимптоту с наклоном –20 дБ/дек после частоты сопряжения ω1. Результирующая ЛАЧХ разомкнутого токового контура Lраз(ω) имеет асимптоту с наклоном –20 дБ/дек, проходящую через частоту среза ωст = 50 с-1, и асимптоту с наклоном –40 дБ/дек после частоты среза ω1 = 100 с- 1. Результирующая ЛФЧХ разомкнутого токового контура рассчитана по
зависимости Ψ(ω) = Ψинт(ω) + Ψинер(ω) = -π/2 – arctg(ωTμ), результат расчета представлен на рис.5.9. Запас по фазе определяется на частоте
среза (см. рис.5.9) и равен ΔΨ(ωс) = 63.40, что говорит об устойчивости токового контура.
Рис.5.9. Логарифмические частотные характеристики разомкнутого токового контура
Воспользуемся возможностями пакета Matlab – Simulink и определим частотные характеристики разомкнутого токового контура для модели, представленной на рис. 5.5. Результаты расчета точных частотных характеристик токового контура представлены на рис.5.10.
Как видно из рис.5.10 частота среза токового контура равна ωст = 45.7с-1, а запас по фазе на частоте среза составляет 65.40, что также подтверждает устойчивость замкнутого токового контура.
129
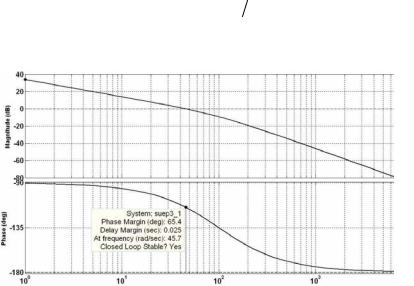
Из сравнения частотных характеристик рис.5.9 и 5.10 можно сделать вывод о том, что расхождение между точными и асимптотическими ЛАЧХ незначительно, и с достаточной степенью точности при анализе СУЭП можно использовать асимптотические ЛАЧХ.
Если в передаточной функции замкнутого токового контура (5.5) пренебречь составляющей 2Tµ2 ≈ 0, то замкнутый контур регулирования якорного тока представляется апериодическим звеном с постоянной времени 2Tµ , т.е. замкнутый контур регулирования якорного тока
(фильтр для контура регулирования скорости) обладает в два раза меньшим быстродействием, чем внутренний фильтр токового контура с
постоянной времени Tµ :
W (p) = |
Ia (p) |
≈ |
1 kот |
. |
(5.9) |
|
|
||||
замт |
uзт (p) |
|
2Tµp +1 |
|
|
|
|
|
|||
Рис.5.10. Точные логарифмические частотные характеристики разомкнутого токового контура
На рис.5.11 показаны переходные процессы при скачкообразном задании uзт = 10В, когда замкнутый токовый контур имеет передаточную
130
функцию колебательного звена с настройкой на МО (5.5) (кривая 1) и инерционного звена (5.9) (кривая 2).
Как видно из рис.5.11, быстродействие токового контура при представлении его колебательным и инерционным звеном практически остается одинаковым, что позволяет при настройке внешнего контура регулирования скорости вращения электродвигателя, представлять замкнутый токовый контур инерционным звеном (фильтром) с
постоянной времени 2Tµ .
Рис.5.11. Переходные процессы uот=f(t) при скачке задания: кривая 1- токовый контур как колебательное звено; кривая 2 - токовый
контур как инерционное звено.
Контрольные вопросы:
1.Чему равна ошибка регулирования якорного тока (поясните, используя передаточную функцию регулятора тока)?
2.Что определяет быстродействие токового контура?
3.Почему на быстродействие токового контура не оказывает влияние постоянная времени Tэ ?
4.Как получить передаточную функцию разомкнутого контура регулирования якорного тока?
5.Поясните вид переходных процессов на рис.5.7.
6.Какой вид имеют ЛАЧХ и ЛФЧХ разомкнутого токового
контура?
131