


3.5. СУЭП с задержанной отрицательной обратной связью по току якоря
Задержанная обратная связь - это такая обратная связь, которая начинает действовать только с определенного уровня регулируемого параметра. На рис. 3.19 показана принципиальная электрическая схема СУЭП с задержанной отрицательной обратной связью по току, в которой обратная связь с выхода датчика тока подключается на вход регулятора через два встречно включенных стабилитрона VD1 и VD2 (один из которых работает при одном направлении якорного тока, а другой при противоположном).
Рис. 3.19. Принципиальная электрическая схема СУЭП с задержанной отрицательной обратной связью по току якоря
Поэтому обратная отрицательная связь по току появится на входе регулятора лишь тогда, когда выходное напряжение датчика тока превысит напряжение стабилизации (пробоя) стабилитрона. При этом один из стабилитронов работает в режиме стабилизации, а другой – в режиме диода.
Таким образом, обратная связь по току вступает в работу, когда ток якоря превысит некоторое значение, которое называют током отсечки. Следовательно, в работе данной системы регулирования можно выделить два режима работы, первый – когда ток якоря меньше тока отсечки и напряжение обратной связи равно нулю (система разомкнута), второй режим - когда ток якоря превышает ток отсечки и на вход
100
регулятора поступает напряжение отрицательной обратной связи по току якоря (система замкнута).
Для анализа статических характеристик системы регулирования воспользуемся вырожденной структурной схемой данной системы регулирования (рис. 3.20).
Uз |
Σ1 ∆u |
|
|
Uу |
|
|
|
Ed Σ2 Еа |
|
ω |
||||||||||||||
kр |
kп |
|
1c |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
Uот БН |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
Uдт |
|
|
|
|
|
|
Rэ |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
kот |
|
|
|
|
Ic |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.20. Вырожденная структурная схема СУЭП с задержанной отрицательной обратной связью по току якоря
Эту схему легко можно получить из структурной схемы рис.3.17 изменив полярность сигнала обратной связи по току на входе регулятора и включив блок нелинейности БН с зоной нечувствительности в цепь обратной связи для получения задержанной обратной связи по току якоря.
Характеристика блока нелинейности БН представлена на рис.3.21. В блоке нелинейности, как правило, имеется возможность установки необходимой величины тока отсечки (Iотс), и величины коэффициента передачи (усиления) блока kбн.
101

Рис.3.21. Характеристика блока нелинейности
На основании структурной схемы рис.3.20 можно получить уравнения электромеханической характеристики для двух режимов работы: при токе якоря меньше тока отсечки (система разомкнута) и при токе якоря больше тока отсечки (система замкнута):
|
|
kрkп |
Rэ |
|
Ia ≤ Iотс |
ω = ω0 − ∆ωзам = Uз |
|
− Ia с |
(3.19) |
с |
|
|
kрkп |
Rэ |
|
Ia Iотс |
ω = ω0 − ∆ωзам = Uз |
|
− Ia с |
|
с |
(3.20) |
−(Ia − Iотс ) kотkбнkрkп
с
Как видно из (3.20) в режиме токовой отсечки (ток якоря превышает значение тока отсечки) отрицательная обратная связь по току приводит к увеличению статической просадки скорости, т.е. уменьшению жесткости характеристики.
Электромеханическая характеристика СУЭП с токовой отсечкой показана на рис. 3.22.
102
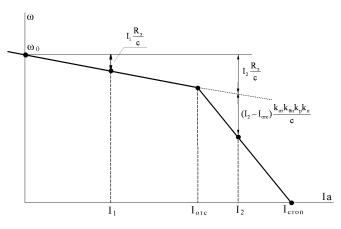
Рис.3.22. Электромеханическая характеристика СУЭП с токовой отсечкой
Такой вид электромеханической характеристики получил название «экскаваторной», т.к. такая характеристика была реализована для электропривода механизмов экскаватора, у которых возможен режим работы «на упор». Например, при работе механизма подъема ковш экскаватора может встретить массивный валун, который механизм поднять не может. В этом случае при возрастании момента нагрузки на валу двигателя, вступает в действие токовая отсечка, электропривод останавливается, развивая момент стопорения, при котором не происходит поломки механической передачи. При этом по якорю протекает ток стопорения, меньший тока короткого замыкания (тока при нулевой скорости на характеристике для разомкнутой системы), который кратковременно может коммутировать электродвигатель. При снижении момента сопротивления меньше момента стопорения, электропривод восстанавливает режим работы на характеристике при скорости, соответствующей моменту нагрузки (например, при токе I1). «Экскаваторную» характеристику должны иметь электроприводы механизмов, работающих «на упор», например, электропривод нажимных винтов.
На рис. 3.23 показана схема блока нелинейности с регулируемой уставкой тока отсечки. Величина напряжения, пропорциональная
величине тока отсечки ( kотIотс ), задается движком потенциометра Rп и
103
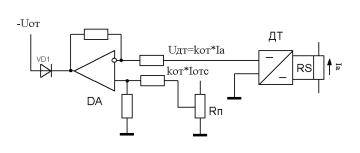
подается на прямой вход операционного усилителя DA. При этом положительное выходное напряжение усилителя смещает диод VD1 в обратном направлении и напряжение отрицательной обратной связи по
току Uот на входе регулятора равно нулю.
Рис.3.23. Принципиальная электрическая схема блока нелинейности
При токе якоря, равном величине тока отсечки, выходное напряжение датчика тока Uдт и напряжение с потенциометра Rп
становятся равными. Поэтому напряжение на выходе усилителя DA (при равенстве коэффициентов передачи по прямому и инверсному входам) так же равно нулю. При превышении током якоря величины тока отсечки, выходное напряжение датчика тока становится больше
напряжения, снимаемого с потенциометра Rп , и диод VD 1 оказывается смещенным в прямом направлении, т.к. напряжение инверсного входа превышает напряжение прямого входа kотIa > kотIотс . Следовательно, на входе регулятора появляется сигнал отрицательной обратной связи по току Uот , вызывающий уменьшение выходного напряжения регулятора,
уменьшение ЭДС тиристорного преобразователя, уменьшение скорости двигателя. При токе якоря, равном току стопорения, электропривод останавливается (см. рис. 3.22). Таким образом, изменяя величину
напряжения, снимаемого с потенциометра |
Rп , можно |
изменять |
||
величину тока отсечки. |
|
|
|
|
Пример 4. Для системы регулирования с токовой отсечкой и |
||||
параметрами Кп = 25, |
Кр=1, Rэ=0,2 |
Ом, Kот= 0,05 В/А, с = 3 Вс, |
||
определить величину |
коэффициента |
блока |
нелинейности |
Kбн , |
|
104 |
|
|
|