

2.2 Характеристики внешних факторов на высоких широтах, влияющих на качество функционирования снс.
В высоких широтах экипажи ВС используют GPS и ГЛОНАСС. Для достижения таких важнейших качеств, как непрерывность и высокая точность навигационных определений [34,37], в глобальной рабочей зоне в составе современных СНС типа ГЛОНАСС и GPS функционируют три основные системы:
— система космических аппаратов, состоящая из навигационных искусственных спутников Земли (сеть навигационных спутников или космический сегмент);
— система контроля и управления (наземный командно-измерительный комплекс или сегмент управления);
— аппаратура потребителей.
Основной операцией, выполняемой в СНС с помощью этих сегментов, является определение пространственных координат местоположения потребителей и времени, т.е. пространственно-временных координат. Эту операцию осуществляют в соответствии с концепцией независимой навигации, предусматривающей вычисление искомых навигационных параметров непосредственно в аппаратуре потребителя. В рамках этой концепции в СНС выбран позиционный способ определения местонахождения потребителей на основе пассивных дальномерных измерений по сигналам нескольких навигационных спутников земли с известными координатами[37]. . Из-за малого наклонения спутниковой группировки (55°) GPS, в высоких широтах имеют малую точность по сравнению со спутниковой группировкой ГЛОНАСС (63°).
Координаты
потребителя в системе определяются
посредством их расчета по псевдодальностям
(ПД) до НКА (навигационный космический
аппарат). Псевдодальность рассчитывается
по временным задержкам 
 сигнала
по трассе «i-й
НКА – потребитель» и известной скорости
распространения радиоволн – с:
сигнала
по трассе «i-й
НКА – потребитель» и известной скорости
распространения радиоволн – с:
 (2.27)
(2.27)
где

 -
время распространения сигнала
-
время распространения сигнала

 (2.28)
(2.28)

 - значение времени на бортовой шкале в
момент излучения некоторой фазы
дальномерного кода со спутника
- значение времени на бортовой шкале в
момент излучения некоторой фазы
дальномерного кода со спутника

 - значение времени на шкале потребителя
в момент приёма той же фазы дальномерного
кода у потребителя.
- значение времени на шкале потребителя
в момент приёма той же фазы дальномерного
кода у потребителя.
Выражение для псевдодальности относительно i-го спутника можно записать в виде[34]:
 (2.29)
(2.29)




 тоговая
погрешность определения псевдодальности
тоговая
погрешность определения псевдодальности

 определяется
как сумма частных составляющих
погрешностей и может быть представлена
в виде[34]:
определяется
как сумма частных составляющих
погрешностей и может быть представлена
в виде[34]:

 (2.30)
(2.30)
где

 - погрешность Эфимиридной информации
- погрешность Эфимиридной информации

 -
частотно временные поправки
-
частотно временные поправки

 - погрешность многолучового распространения
- погрешность многолучового распространения

 -погрешность
распространения радиоволн в трапосфере
-погрешность
распространения радиоволн в трапосфере

 - погрешность распространения радиоволн
в ионосфере
- погрешность распространения радиоволн
в ионосфере



 погрешности
релявитских и гравитационных эффектов.
погрешности
релявитских и гравитационных эффектов.
Помехи радиоприему создаются как естественным путем, так и искусственным источникам. К естественным источникам помехам в высоких широтах относятся полярные сияния, внеземные источники помех и др. Искусственными источниками являются радиотехнические средства, такие как радиовещательные, радионавигационные и связные средства.
Проанализируем каждую из выше указанных погрешностей, методы их коррекции и особенности эксплуатации СНС на высоких широтах.
Ошибки вычисления орбит

 появляются в следствии неточностей
прогноза и расчёта эфемерид спутников,
выполняемых в аппаратуре приёмника.
При проведении эксперементальных
исследований под эфемеридными
погрешностями подразумевают следующие
погрешности: - трансверсальная (по
касательной к траектории); - радиальная;
- нормальная (по нормали к плоскости,
образуемой векторами ). Итоговые
результаты исследований Информационного
аналитического центра ЦНИИМАШ [40]
эфемеридных погрешностей для НКАGPS
приведены на рисунке, максимальные
значения за время наблюдения занесены
в таблицу 2.3.
появляются в следствии неточностей
прогноза и расчёта эфемерид спутников,
выполняемых в аппаратуре приёмника.
При проведении эксперементальных
исследований под эфемеридными
погрешностями подразумевают следующие
погрешности: - трансверсальная (по
касательной к траектории); - радиальная;
- нормальная (по нормали к плоскости,
образуемой векторами ). Итоговые
результаты исследований Информационного
аналитического центра ЦНИИМАШ [40]
эфемеридных погрешностей для НКАGPS
приведены на рисунке, максимальные
значения за время наблюдения занесены
в таблицу 2.3.
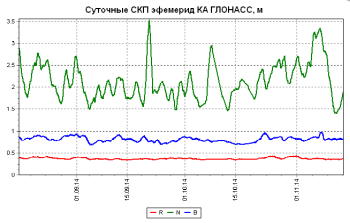
Рисунок 2.9 Суточные значения СКП всех пригодных НКА к использованию, R – радиальна погрешность, N – нормальная, B- трансверсальная.
Таблица 2.3
|
Тип погрешности |
СКО,м |
|
Радиальная,σr |
0,4 |
|
Нормальная,σn |
3,5 |
|
Трансверсальная,σb |
0,9 |
Определенные выше эфемеридные погрешности принято пересчитывать в эквивалентную ошибку определения псевдодальности Общая формула для пересчёта эфемеридных погрешностей в погрешность определения псевдодальности имеет вид:
 (2.31)
(2.31)
где
коэффициенты k
определяют вклад соответствующих
ошибок в итоговую ошибку и зависят от
взаимного положения НКА и потребителя.
Были расcчитаны
[39] усредненные (по различным угловым
положениям НКА и потребителя) значения
этих коэффициентов:

Используя таблицу 2.2 получаем приведенную к псевдодальности погрешность, обусловленную эфемеридными погрешностями равную 0,5 м.
Частотно-временная погрешность –
К дальномерным погрешностям частотно-временной области можно отнести и погрешности, вносимые групповой задержкой навигационного сигнала в аппаратуре спутника. Групповая задержка представляет собой интервал времени между выходным навигационным сигналом в фазовом центре передающей антенны и выходным сигналом бортового эталона частоты и времени. Систематическая составляющая групповой задержки измеряется при сборке и калибровке аппаратуры спутника, она индивидуальна для каждого НКА и передается в составе его служебного сообщения. Случайная составляющая рассматривается в составе дальномерной погрешности и обычно не превышает 3 нс. Степень достоверности частотно-временных поправок зависит от их «возраста», т. е. от срока, прошедшего с момента загрузки в память бортового вычислителя. В ситуации, когда происходит затенение спутника, коррекция эфемерид спутника длительное время невозможна. Для уменьшения зависимости от интервала между обновлениями данных применяется режим межспутниковых измерений, реализованный в GPS на спутниках типа BlockIIR и подлежащий реализации в ГЛОНАСС на спутниках типа ГЛОНАСС-М.
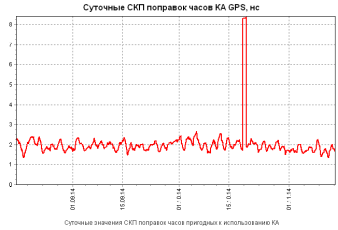
Рисунок 2.10 Суточные значения СКП поправок часов пригодных к использованию НКА.

 при
работе приёмника в условиях, отличных
от «свободного пространства», на его
вход, кроме сигналов НКА, могут поступать
переотраженные от местных предметов
(а также от подстилающей поверхности)
сигналы. Это приводит к смещению
измеряемого в приёмнике положения
максимума корреляционной функции
опорного сигнала с поступившей смесью
входных сигналов, т. е. к возникновению
погрешности в оценке времени приёма
сигнала, а следовательно, и в оценке
псевдодальности. В
высоких широтах можно пренебречь
индустриальными помехами, которые
могут быть отнесены к квазиимпульсным
помехам, из-за плохо развитой
инфраструктуры. В высоких широтах
существенное значение имеют сигналы,
подобные помехам, обусловленные
прохождением в точку приёма отраженного
от ледовых покрытий сигнала[16].
при
работе приёмника в условиях, отличных
от «свободного пространства», на его
вход, кроме сигналов НКА, могут поступать
переотраженные от местных предметов
(а также от подстилающей поверхности)
сигналы. Это приводит к смещению
измеряемого в приёмнике положения
максимума корреляционной функции
опорного сигнала с поступившей смесью
входных сигналов, т. е. к возникновению
погрешности в оценке времени приёма
сигнала, а следовательно, и в оценке
псевдодальности. В
высоких широтах можно пренебречь
индустриальными помехами, которые
могут быть отнесены к квазиимпульсным
помехам, из-за плохо развитой
инфраструктуры. В высоких широтах
существенное значение имеют сигналы,
подобные помехам, обусловленные
прохождением в точку приёма отраженного
от ледовых покрытий сигнала[16].Рассеивание в атомосфере. состоит из рассеивания радиоволн при прохождении трапосферы и атмосферы
Рассеивание
в ионосфере для частотных диапазонов
СНС

Основная проблема при компенсации ионосферной задержки состоит в том, что значение задержки очень широко меняется в зависимости от региона, в котором расположен приёмоиндикатор, времени суток и года, солнечной и геомагнитной активности. В полярной ионосфере существенное влияние оказывают неоднородности, сформированные выпадением протонов и электронов с полярного каспа при магнитных и ионосферных бурях, авроральные и субавроральные неоднородности, при этом частота появления этих неоднородностей приходиться на зимний период.
Для получения определенных закономерностей в указанных зонах за период международного геофизического года (МГГ) в работе[16] были проанализированы данные ионосферных станций, координаты которых приведены в табл. 2.4
Таблица 2.4
|
Станция |
Геодезическая широт А |
Геомагнитная широта |
|
Черчилл Борроу Нарсарсук Диксон Рейкьявик Тикси Мурманск Кируна Колледж Салехард Бейкер-Лейк Бухта тихая |
58°,8 с.ш. 71°,8 с.ш. 61°,8 с.ш. 73°,30 с.ш. 64°,08 с.ш. 71°,36 с.ш. 68°,57 с.ш. 67°,50 с.ш. 64°,51 с.ш. 66°,32 с.ш. 64°,18 с.ш. 80°,37 с.ш. |
68°,7 с.ш. 68°,4 с.ш. 71°,2 с.ш. 63° с.ш. 70°,2 с.ш. 60°,4 с.ш. 64°,1 с.ш. 65°,3 с.ш. 67°,7 с.ш. 56°,4 с.ш. 73°,7 с.ш. 70°,9 с.ш. |
Так как в летнее полугодие Солнце в высоких широтах не опускается за горизонт, в отличие от умеренных широт, ионосферные станции круглосуточно фиксируют слои E, Fi и P2, причем изменение критических частот в основном характеризуется теми же закономерностями, что и в средних широтах. Различие состоит в том, что амплитуда суточных и сезонных изменений заметно меньше и убывает по мере увеличения широты.
В этот период лучистая энергия Солнца оказывается определяющей в ионизации Земной атмосферы. В остальные времена года вклад корпускулярной ионизации Земной атмосферы становиться особенно заметным.
Сигналы спутниковых радионавигационных систем, передаваемые в частотном диапазоне 1000-1600 МГц, могут испытывать аномальное рассеяние в высокоширотной ионосфере в области высот 200-500 км[39].
Процесс рассеяния обусловлен эффективным взаимодействиям радиоволн с интенсивными ионно-звуковыми колебаниями, которые генерируются в области неизометричности плазмы, возникающей из-за наличия продольных стационарных электрических токов и нагрева плазмы в системе «ионосфера-плазмосфера» за счет диссипации энергии кольцевого тока. Последствиями данного процесса могут быть уменьшение интенсивности полезного сигнала и неопределенность положения источника сигнала для приемника.
Изучая данные полученные в ходе исследований [16], можно сделать выводы, что в диапазоне высот 200-500 км в высокоширотной ионосфере имеется область ионно-звуковой турбулентности, в которой могут испытывать аномальное рассеяние сигналы спутниковых радионавигационных систем, передаваемые в частотном диапазоне 1000-1600 МГц.
При этом происходит увеличение погрешности определения псевдодальности, обусловленное тем, что каждая точка зоны ионно-звуковой турбулентности может, за счет рассеяния исходного сигнала, излучать сигнал, подобный спутниковому сигналу СНС.
Более того, при рассеивании излучаемого навигационным спутником сигнала на ионно-звуковой турбулентности происходит изменение направления волнового вектора на большие углы, что может привести к полной потере приемником сигнала СНС, то есть к нарушению функционирование системы спутниковой навигации. Рассмотрение особенности зоны высоких широт приводит к выводу, что источниками ионизации ионосферы для этой области является как лучистое, так и корпускулярное излучение Солнца, причем вклад каждой составляющей в зависимости от широты, времени суток, времени года различен.
Канал передачи дифференциальных поправок подвержен воздействию сразу нескольких типов различных факторов, что в конечном итоге приводит к понижению его надежности в высоких широтах.
Тропосферная составляющая погрешности измерений обусловлена наличием трапосферной рефракции. Задержка сигнала в тропопсфере может достигать от 8 до 80 нс, что соответствует погрешности измерения псевдодальности от 2,4 до 24 м. Значение тропосферной погрешности зависит от метеоданных (атмосферное давление, температура и влажность воздуха, а также угла места НКА (угло возвышения над горизонтом) Тропосферная составляющая погрешности измерения псевдодальности состоит из двух компонент. Первая определяется влиянием сухой атмосферы, вторая зависит от содержания водяных паров а атмосфере[37]:
Т=Тd+Tw, (2.32)
Td-погрешность за счет влияния сухой атмосферы;
Tw- погрешность за счет наличия водяного пара в атмосфере.
Модель трапосферы Саатсмоинена представляет собой следующую зависимость:
T=
 (2.33)
(2.33)
где Т – задержка сигнала в тропосфере, м; z – зенитный угол, град; p - атмосферное давление, мб; t – температура, К; e – парцианальное давление, мб.
Учитывая, что Арктическая зона это область низких температур и высокого давления[40], погрешность распространения радиоволн через трапосферу, будет выше, чем в средних широтах Земли.
Среднеорбитальная СНС ГЛОНАСС – одна из немногих технических систем, на характеристики которой оказывают заметное влияние законы обшей и специальной теории относительности Эйнштейна. Связано это с тем, что, во-первых, НКА движутся по орбитам с достаточно высокими скоростями; во-вторых, разность гравитационных потенциалов в точках нахождения НКА и потребителя такова, что ею нельзя пренебречь; в-третьих, Земля с находящимися на ней потребителями вращается относительно инерциальной системы координат, в которой задается движение НКА. Остановимся кратко на отмеченных факторах, следуя [41]. Более подробное описание релятивистских эффектов можно найти в [42].
Погрешность аппаратуры потребителя.
Следующим по порядку прохождения сигнала источником дальномерных погрешностей считается схема приемоиндикатора. Основным источником погрешностей являются схемы слежения за задержкой огибающей и несущей сигнала. Принято различать шумовые и динамические погрешности. Огибающей сигнала НКА являются двоичные параметры системы передач (ПСП). Шумовая погрешность некогерентной схемы слежения за задержкой ПСП имеет СКО [37], представленное следующей формулой:
σ=
 (2.34)
(2.34)
где τS – длительность элементарного символа ПСП; Bt – односторонняя ширина полосы пропускания схемы слежения за задержкой; Br – односторонняя ширина полосы пропускания тракта промежуточной частоты;
P/N0 – отношение мощности сигнала к спектральной плотности шума на входе приемника.
При этом диапазон погрешностей оценивания псевдодальности составляет 0,5...30 м, а псевдоскорости – 0,1...10 м/с. Данные погрешности обусловлены внутренним шумом приемника и динамикой движения потребителя. Кроме данных источников погрешностей, в приемнике есть еще один источник погрешностей оценивания псевдодальности и псевдоскорости – опорный генератор. При этом на характеристики следящих систем приемника оказывает влияние кратковременная нестабильность частоты. Нестабильность частоты опорного генератора (ОГ) приводит к нестабильности шкалы времени приемника и флуктуациям фазы ОГ.