

2.3.2 Оценка погрешностей бинс .
С помощью стенда полунатурного моделирования был произведен эксперимент, описанный в [33], который иллюстрирует накопление погрешности бесплатформенной инерциальной навигационной системой при автономной работе.
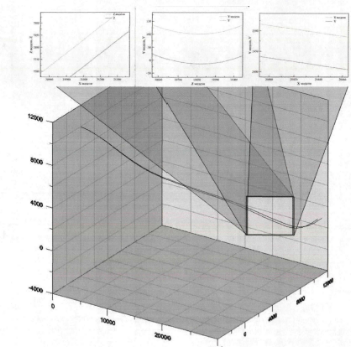
Pиc.2.7 Траектория модели и расчетная без СНС
Как видно из рисунка 2.7, на котором приведены модельная и расчетная траектории, характерные для 120 секунд полета планирующего объекта. Ошибка определения координат объекта через 120 секунд превышает 100 метров. Такая ошибка неприемлема для задач ориентации и навигации большинства беспилотных объектов. Из выше сказанного следует, что при длительной работе автономной режиме накопление погрешностей приводит к тому, что вырабатываемая ИНС навигационная информация утрачивает необходимую адекватность и тогда целесообразно корректировать БИНС с помощью внешних или внутренних источников навигационной информации.
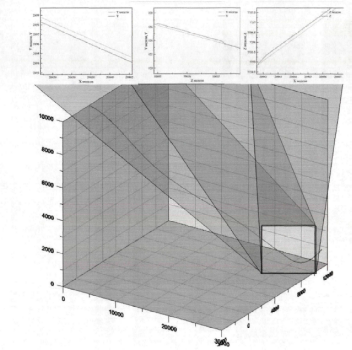
Рис 2.8. Траектория модели и расчетная с СНС
На рисунке 2.8 представлена модельная и расчетная траектория длительностью около 120 секунд, характерная для планирующего объекта. Из рисунка видно, что составляющие вектора координат не расходятся с модельными более чем на 5 метров через 120 секунд полета, без улучшения процедуры калибровки.
Для повышения точности определения вектора скорости необходимо корректировать его значение, рассчитанное в БИНС, используя сигнал от СНС, а также совершенствовать калибровку датчиков угловых скоростей и линейных ускорений, чтобы уменьшить влияние возмущенного режима работы БИНС.
Таблица 2.2 Характеристки современных БИНС:
|
Система |
Инерциальный датчик |
Страна |
Точность (без СНС / с СНС) |
|
БИНС-1000МЛ |
ЛГ/ВОГ |
Россия |
1 nm / 20 m |
|
iNAV-FJI |
ВОГ |
Германия |
3 nm / 0,3 m |
|
НСИ-2000 |
ЛГ |
Россия (МО, Долгопрудный) |
2,7 nm / 100 m |
|
НСИ-2000МТ |
ЛГ |
Россия (МО, Долгопрудный) |
2,7 nm / 100 m |
|
ЛИНС-100РС |
ЛГ |
Россия-Франция |
1 nm / 20 m |
|
ВЕКТОР-100 |
? |
Россия-Франция |
2 nm / - |
|
БИНС-2015 |
ЛГ |
Россия (Москва) |
1 nm / 44 m |
|
БИМС-Т |
|
Россия (Москва) |
2 nm / 30 m |
|
БИНС-501 |
ВОГ |
Россия (Зеленоград) |
2,15 nm / 20 m |
|
ИНС-2000 |
ЛГ |
Россия (Москва) |
2 nm / 40 m |
|
TOTEM 3000 |
ЛГ |
Канада |
н/д |
Таким образом. Наиболее полная компенсация погрешностей ИНС осуществляется с помощью алгоритмической обработки информации с ИНС и дополнительного внешнего по отношению к ИНС датчика навигационной информации. Компенсация погрешностей в выходной информации системы обычно осуществляется посредством алгоритмов оценивания. Хорошо известный фильтр Калмана теоретически позволяет получить оптимальную оценку вектора состояния системы [33].
Навигационные комплексы представляют собой некоторое количество систем и датчиков, в основу принципа действия которых положены различные физические закономерности. Эти системы объединены алгоритмически. При функционировании ИНС на длительных интервалах времени (более 1 часа) без коррекции от спутников или стационарных станций углы отклонения гироскопа нарастают.
Точность корректируемых ИНС в значительной степени зависит от погрешностей внешнего источника информации и ошибок используемого алгоритма. В частности, от адекватности математической модели погрешностей ИНС.