

bg_0490oxford_glazkov / oxford_doc / glava8
.docГлава 8
ОРГАНЫ УПРАВЛЕНИЯ ПОЛЕТОМ
Содержание
НАЗНАЧЕНИЕ ОРГАНОВ УПРАВЛЕНИЯ ПОЛЕТОМ 161
МОМЕНТЫ ВОКРУГ ОСЕЙ 161
ШАРНИРНЫЕ МОМЕНТЫ 162
БАЛАНСИРОВКА ОРГАНОВ УПРАВЛЕНИЯ 162
АЭРОДИНАМИЧЕСКАЯ БАЛАНСИРОВКА 163
МАССОВАЯ БАЛАНСИРОВКА 166
ПРОДОЛЬНОЕ УПРАВЛЕНИЕ 166
ПОПЕРЕЧНОЕ УПРАВЛЕНИЕ 166
ВНУТРЕННИЕ ЭЛЕРОНЫ 167
ФЛАПЕРОНЫ 167
СПОЙЛЕРЫ 168
КОМБИНИРОВАННОЕ УПРАВЛЕНИЕ СПОЙЛЕРАМИ и ЭЛЕРОНАМИ 168
АЭРОДИНАМИЧЕСКИЕ ТОРМОЗА 168
ВЛИЯНИЕ АЭРОДИНАМИЧЕСКИХ ТОРМОЗОВ НА ПОЛЯРУ СОПРОТИВЛЕНИЯ 169
НАЗЕМНЫЕ СПОЙЛЕРЫ (ГАСИТЕЛИ ПОДЪЕМНОЙ СИЛЫ) 169
ПУТЕВОЕ УПРАВЛЕНИЕ 170
РЕДУКТОР РУЛЯ НАПРАВЛЕНИЯ 170
ТРИММИРОВАНИЕ 170
МЕТОДЫ ТРИММИРОВАНИЯ 171
ТРИММЕР 171
УПРАВЛЯЕМЫЙ СТАБИЛИЗАТОР 172
ПРУЖИННАЯ ЗАГРУЗКА 173
РЕГУЛИРОВКА ПОЛОЖЕНИЯ ЦТ 173
ТРИММИРОВАНИЕ АВТОМАТА ЗАГРУЗКИ 174
ТРИММИРОВАНИЕ ПО ЧИСЛУ М 174
ТРИММИРОВАНИЕ, СЕЛЕКТОРЫ ЗАКРЫЛКОВ и АЭРОДИНАМИЧЕСКИХ ТОРМОЗОВ 174
ИНДИКАТОРЫ ПОЛОЖЕНИЯ ОРГАНОВ УПРАВЛЕНИЯ 176
НАЗНАЧЕНИЕ ОРГАНОВ УПРАВЛЕНИЯ ПОЛЕТОМ
В устоявшемся полете самолет должен быть сбалансирован (нулевые моменты вокруг осей), а органы управления должны способствовать достижению этого состояния для всех возможных конфигураций и положений ЦТ. Второй задачей органов управления является маневрирование самолета вокруг трех осей.
МОМЕНТЫ ВОКРУГ ОСЕЙ
а) Продольная ось. Вращение вокруг продольной оси называется крен и управляется с помощью элеронов, а у некоторых самолетов с помощью спойлеров или комбинацией обоих органов.
b) Поперечная ось. Вращение вокруг поперечной оси называется тангаж и управляется с помощью руля высоты или с помощью перемещения стабилизатора.
с) Нормальная ось. Вращение вокруг нормальной оси называется рысканием и управляется с помощью руля направления.
У некоторых самолетов вращение вокруг двух осей может осуществляться одной поверхностью управления:
а) Элевона (руля высоты и элерона), применяемого на самолете типа бесхвостка, управляет креном и тангажом;
b) Руля направления и высоты – раддерватора (при V-образном хвостовом оперении), который управляет тангажом и рысканием;
с) Цельноповоротного стабилизатора – стабилатора, который комбинирует двойную функцию горизонтального стабилизатора и руля высоты, т.е. способствует продольной устойчивость и управляемости.
Момент вокруг оси генерируется с помощью изменения аэродинамической силы на соответствующем профиле (крыле, хвосте или стабилизаторе) и может осуществляться следующими способами:
а) Изменение кривизны профиля;
b) Изменение угла атаки профиля;
с) Уменьшение аэродинамической силы с помощью «порчи» воздушного потока.
ОРГАНЫ УПРАВЛЕНИЯ ПОЛЕТОМ
Увеличение кривизны аэродинамического профиля приводит к увеличению его подъемной силы; отклонение поверхности управления вниз эффективно увеличивает ее кривизну.
Такой принцип применим для управления по каждой из трех осей: рулем высоты – для тангажа, элероном – для крена и рулем направления для рыскания.
При увеличении угла наклона, а, соответственно, и угла атаки профиля, будет увеличиваться его подъемная сила. Наиболее распространенным применением такой системы является управление тангажом – подвижный хвостовой стабилизатор. Рис. 8.1.
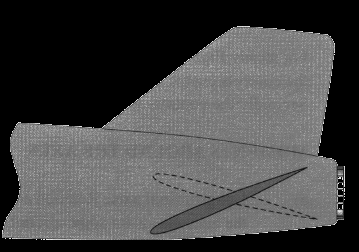
Рис. 8.1
Спойлером называется устройство понижения подъемной силы профиля с помощью распределения воздушного потока над верхней поверхностью. Он применяется для обеспечения поперечного управления с помощью понижения подъемной силы только на одном полукрыле.
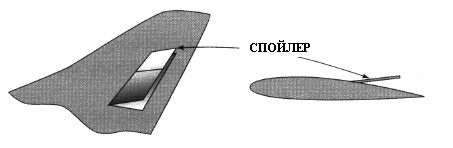
Рис. 8.2
ШАРНИРНЫЕ МОМЕНТЫ
Если аэродинамическая сила воздействует на поверхность управления, она будет стремиться повернуть поверхность вокруг шарнира (петли навески) в направлении действия силы. Моментом будет произведение силы на плечо (расстояние) от шарнира до центра давления поверхности управления. Этот момент называется шарнирным. Сила может быть вызвана углом атаки профиля или отклонением поверхности управления.
Считается, что полный шарнирный момент является суммой отдельных эффектов от угла атаки и отклонения поверхности управления. Для поддержания органа управления в выбранном положении пилот должен уравновесить шарнирный момент, прилагая нагрузку на орган управления в кабине. Поэтому нагрузка на орган управления в кабине зависит от величины шарнирного момента.

Рис. 8.3.
БАЛАНСИРОВКА ОРГАНОВ УПРАВЛЕНИЯ
Аэродинамическая сила на поверхности управления при заданном отклонении будет зависеть от размера поверхности и квадрата скорости. Для больших и скоростных самолетов результирующая сила может создавать слишком большие для легкого управления органами шарнирные моменты и усилия на ручке управления. Пилоту потребуется помощь для перемещения органов управления в таких условиях, и это можно осуществить с помощью автомата загрузки или с помощью аэродинамической балансировки.
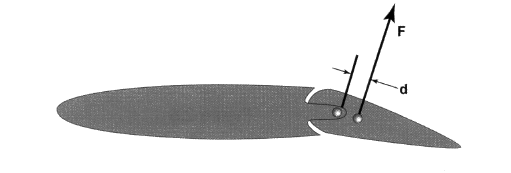
Рис. 8.4
АЭРОДИНАМИЧЕСКАЯ БАЛАНСИРОВКА
Аэродинамическая балансировка подразумевает использование аэродинамических сил на поверхности управления для уменьшения шарнирного момента и может осуществляться несколькими методами:
а) Углубление оси шарнира. Плечо момента от силы на поверхности управления – это расстояние от шарнира до центра давления поверхности. Если шарнир переместить вглубь поверхности, плечо и шарнирный момент уменьшатся.
Углубление шарнира не снижает эффективность управления, уменьшается только шарнирный момент силы, а не сама сила.
b) Роговая балансировка. Принцип роговой балансировки похож на углубление шарнира в той части, где поверхность находится впереди оси шарнира, и силы на этой части поверхности создают шарнирные моменты, имеющие противоположное направление моментам на основной части поверхности. Поэтому снижается суммарный момент, а не эффективность управления.
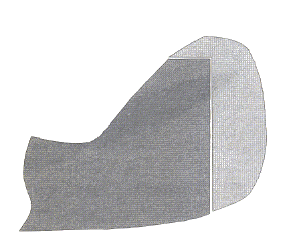
Рис. 8.5
с) Внутренняя балансировка. Данный вид балансировки работает по аналогичному принципу, что и углубление шарнира, зона балансировки находится внутри крыла.
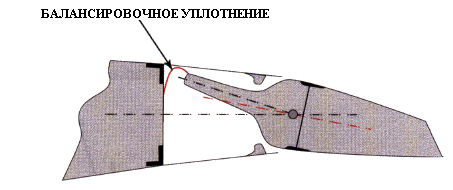
Рис. 8.6
Перемещение поверхности вызывает изменение давления на профиле, и это изменение давления будет восприниматься зоной балансировки. Например, если поверхность управления перемещается вниз, давление над профилем уменьшится, а под профилем увеличится. Уменьшение давления будет ощущаться в верхней зоне балансировки, а увеличение давления – в нижней зоне. Перепад давлений в зоне балансировки создает шарнирный момент, противоположный моменту на основной поверхности управления, и полный шарнирный момент уменьшается.
d) Балансировочная сервокомпенсация. Все рассмотренные выше методы обеспечивают балансировку, создавая давления на поверхности управления для воздействия спереди от оси шарнира. Сервокомпенсатор вызывает силу, действующую на заднюю кромку поверхности управления, которая противоположна силе, действующей на основную поверхность. Сервокомпенсатор приводится в движение в противоположном основной поверхности направлении, куда бы она ни отклонялась.

Рис. 8.7
В отличие от предыдущих методов, сервокомпенсация создает некоторое снижение эффективности управления, т.к. сила на сервокомпенсаторе противоположна силе на основной поверхности.
е) Анти балансировочная сервокомпенсация. Анти сервокомпенсатор приводится в движение в том же направлении, что и основная поверхность, и поэтому повышает эффективность управления, но также и увеличивает шарнирный момент и создает большее усилия на ручке управления.
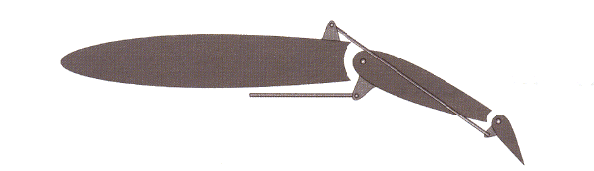
Рис. 8.8
f) Пружинная сервокомпенсация. Пружинный сервокомпенсатор является модификацией балансировочного сервокомпенсатора, его перемещение пропорционально перемещению ручки управления. Максимальная разгрузка достигается при максимальном усилии на ручке управления. Это достигается с помощью пружины в системе тяг сервокомпенсатора. Пружинный сервокомпенсатор применяется главным образом для снижения нагрузок на управление при высоких воздушных скоростях.

Рис. 8.9

Рис. 8.10
g) Сервокомпенсация. Назначением сервокомпенсатора является облегчение перемещения пилотом поверхности управления. В данной системе нет прямого перемещения поверхности управления в результате перемещения органов в кабине. От воздействия пилота на орган управления отклоняется сервокомпенсатор, сила на нем затем отклоняет поверхность управления до тех пор, пока не будет достигнуто состояние равновесия. Если самолет находится в стационарном положении на земле, перемещение органа управления в кабине не будет вызывать перемещение поверхности, а только сервокомпенсатора; необходимо помнить, если на поверхности управления установлены внешние замки, органы управления в кабине сохраняют способность свободного перемещения.
МАССОВАЯ БАЛАНСИРОВКА
Массовая балансировка представляет собой груз, прикрепленный к поверхности управления спереди шарнира. Большинство поверхностей управления имеют массовую балансировку. Ее назначением является предотвращение флаттера поверхности. Флаттером называется колебание поверхности, которое может быть вызвано изгибом и скручиванием конструкции под нагрузкой. Если центр тяжести поверхности управления находится позади шарнира, ее инерция вызывает колебания вокруг шарнира при изгибе конструкции. При определенных условиях колебания могут быть нарастающими и вызвать разрушение конструкции.
Флаттер можно предотвратить с помощью добавления веса к поверхности управления спереди от оси шарнира. При этом центр тяжести поверхности переносится в положение близкое к шарниру или немного впереди него в точку, рассчитанную конструкторами. Эта мера снижает моменты инерции вокруг шарнира, предотвращая развитие флаттера. На рис. 8.11 представлены некоторые общие методы массовой балансировки.

Рис. 8.11
ПРОДОЛЬНОЕ УПРАВЛЕНИЕ
Управление тангажом обычно осуществляется рулем высоты или перемещением хвостового стабилизатора, и органы управления должны правильно работать для уравновешивания самолета во всем диапазоне скоростей, при всех разрешенных положениях ЦТ и конфигурациях, и создавать правильную угловую скорость по тангажу для маневрирования.
ПОПЕРЕЧНОЕ УПРАВЛЕНИЕ
Поперечное управление осуществляется элеронами, которые создают моменты крена с помощью увеличения подъемной силы на одном полукрыле и уменьшения ее на другом.
Нежелательное рыскание из-за отклонения элеронов
Увеличенная подъемная сила на поднимающемся полукрыле вызывает увеличение индуктивного сопротивления, в то время как уменьшенная подъемная сила на опускающемся полукрыле создает уменьшение индуктивного сопротивления. Разница в сопротивлениях между двумя полукрыльями создает момент рыскания, который противоположен моменту крена, т.е. крен влево создает момент рыскания вправо. Это называется нежелательным рысканием из-за отклонения элеронов.
Для уменьшения нежелательного рыскания были созданы различные методы, основные из которых перечислены ниже:
а) Дифференциальные элероны. Система тяг элеронов разработана таким образом, что поднимающийся элерон отклоняется на больший угол, чем опускающийся. При этом сопротивление на поднятом элероне увеличивается, а на опущенном уменьшается, т.о. различие в сопротивлениях между полукрыльями уменьшается.
b) Профилированные элероны. Профилированные элероны имеют ассиметричную переднюю кромку, как показано на рис. 8.12.
Передняя кромка поднимающегося элерона выпирает из под нижней поверхности крыла, создавая высокое сопротивление. Передняя кромка опускающегося элерона остается спрятанной и создает меньшее сопротивление.
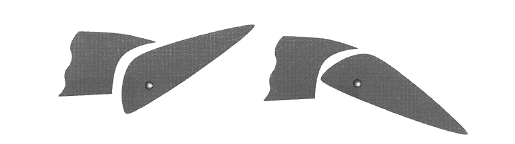
Рис. 8.12
с) Муфта сцепления элерона и руля направления. В данном случае системы элеронов и руля направления взаимосвязаны, поэтому при отклонении элеронов руль направления автоматически перемещается для противодействия нежелательному рысканию.
Если для увеличения угловой скорости крена при отклонении элеронов используются спойлеры, они будут уменьшать нежелательное рыскание, т.к. опускающееся полукрыло имеет увеличенное сопротивление из-за отклоненного спойлера.
ВНУТРЕННИЕ ЭЛЕРОНЫ
Элероны обычно располагаются на периферии крыла для создания большего момента силы. Однако это обычно вызывает максимальные скручивающие и изгибные нагрузки на крыле. Это может повлечь снижение эффективности или даже обратное действие элерона. Для уменьшения данных эффектов элероны могут располагаться ближе к корневой части крыла. В качестве альтернативы устанавливаются два комплекта элеронов: один на периферии для использования на низких скоростях при небольших воздействующих силах, а другой близко к корневой части для высоких скоростей, когда силы больше и могут вызвать большую деформацию конструкции.
ФЛАПЕРОНЫ
Закрылки и элероны составляют часть задней кромки крыла. Для получения хороших характеристик взлета и посадки закрылки должны иметь максимально возможную величину, а для хорошей скорости крена, элероны должны иметь максимальный размер. Однако доступное пространство ограничено. Решением является симметричное опускание элеронов для увеличения площади закрылков. Для поперечного управления элероны далее отклоняются дифференциально от опущенного положения для обеспечения поперечного управления. Другим решением является использование подвижных поверхностей задней кромки для обеспечения работы, как закрылков, так и элеронов.
СПОЙЛЕРЫ
Спойлеры могут использоваться для обеспечения поперечного управления в дополнение к элеронам или вместо них. Спойлеры представляют собой отклоняемую часть верхней поверхности крыла. Они показаны на рис. 8.3. Отклонение спойлера вызывает искажение воздушного потока над крылом и уменьшение подъемной силы. Для работы в качестве органов поперечного управления спойлер отклоняется (поднимается) на том полукрыле, которое необходимо опустить, а на другом полукрыле спойлер остается в убранном положении. В отличии от элерона, спойлер не может увеличивать подъемную силу, поэтому крен под управлением спойлерами будет всегда сопровождаться потерей подъемной силы. Однако по сравнению с элеронами спойлеры имеют несколько преимуществ:
а) Отсутствие нежелательного рыскания. Поднятый спойлер увеличивает сопротивление, поэтому рыскание происходит в направлении крена.
b) Уменьшенное скручивание крыла. Потеря подъемной силы распределяется по хорде крыла, а не концентрируется на периферии.
с) На сверхзвуковой скорости их эффективность не снижается при отрыве пограничного слоя под действием скачка уплотнения.
d) Не могут вызвать флаттер.
е) Спойлеры не занимают заднюю кромку, которую можно использовать для расположения закрылков.
КОМБИНИРОВАННОЕ УПРАВЛЕНИЕ СПОЙЛЕРАМИ И ЭЛЕРОНАМИ
У некоторых самолетов поперечное управление осуществляется только спойлерами, но в большинстве случаев спойлеры работают совместно с элеронами. Одних элеронов может быть недостаточно для достижения требуемой скорости крена на низких скоростях полета при низком динамическом давлении, а на высоких скоростях они отклонение элеронов может вызвать чрезмерное скручивание крыла и потерю эффективности при отрыве пограничного слоя под действием скачка уплотнения на сверхзвуковой скорости. Спойлеры могут использоваться для увеличения скорости крена, но их применение во всем диапазоне скоростей полета может не требоваться. У некоторых самолетов работа спойлеров требуется только на низкой скорости, это можно сделать с помощью деактивации спойлеров при убранных закрылках. Перемещение органов поперечного управления в кабине передается на миксер, который активирует подъем спойлера при подъеме элерона и сохраняет его в убранном положении при опускании элерона.
АЭРОДИНАМИЧЕСКИЕ ТОРМОЗА
Аэродинамические тормоза предназначены для увеличения сопротивления самолета, когда требуется быстро снизить скорость или резко снизиться. Резкое замедление требуется при неожиданной встрече с турбулентностью на высокой скорости для снижения скорости до Скорости в Условиях Турбулентности как можно быстрее. Высокая скорость снижения может потребоваться для удовлетворения требований службы УВД, а также в случае необходимости аварийного снижения.
ТИПЫ АЭРОДИНАМИЧЕСКИХ ТОРМОЗОВ
В идеале воздушный тормоз должен увеличивать сопротивление без потери подъемной силы или изменения момента тангажа. Аэродинамический тормоз на фюзеляже лучше всего удовлетворяет этим требованиям. (Рис. 8.13).

Рис. 8.13
Однако т.к. спойлеры на крыле вызывают увеличение сопротивления, удобно использовать их в качестве аэродинамических тормозов в дополнение к функции поперечного управления. Для управления спойлерами в качестве аэродинамических тормозов используется отдельный рычаг в кабине, и они отклоняются симметрично. Работа аэродинамических тормозов нормально блокируется до скорости VMO, они также могут быть убраны скоростным напором из полностью выпущенного положения на высоких скоростях. При использовании в качестве аэродинамических тормозов спойлеры могут функционировать как органы управления креном с помощью дифференциального перемещения из выбранной позиции торможения.
ВЛИЯНИЕ АЭРОДИНАМИЧЕСКИХ ТОРМОЗОВ НА ПОЛЯРУ СОПРОТИВЛЕНИЯ
Сопротивление в результате работы аэродинамических тормозов является профильным и не только увеличивает полное сопротивление, но и уменьшает Vmd. Это дает преимущество на низких скоростях, т.к. стабильность скорости будет лучше, чем у самолета в чистой конфигурации.
НАЗЕМНЫЕ СПОЙЛЕРЫ (ГАСИТЕЛИ ПОДЪЕМНОЙ СИЛЫ)
Во время посадочного пробега замедляющая сила создается аэродинамическим сопротивлением и сопротивлением тормозов колес. Сопротивление тормозов колес зависит от веса на колесах, но оно может быть уменьшено подъемной силой, создаваемой на крыле. Подъемная сила на крыле может быть снижена с помощью работы спойлеров. И тормозное, и аэродинамическое сопротивление увеличиваются, а посадочный пробег уменьшается. У многих типов самолетов существуют спойлеры для использования на земле. Наземные спойлеры отключаются в полете при помощи концевика на стойке шасси, который работает от выпуска стойки после взлета.
ПУТЕВОЕ УПРАВЛЕНИЕ
Управление рысканием осуществляется с помощью руля направления. Руль направления необходим для выполнения следующих функций:
а) Поддержание путевой управляемости с ассиметричной силой;
b) Корректировка по боковому ветру во время взлета и посадки;
с) Корректировка по нежелательному рысканию;
d) Вывод из штопора;
е) Корректировка изменений крутящего момента винта для однодвигательного самолета.
РЕДУКТОР РУЛЯ НАПРАВЛЕНИЯ
В простой системе управления полное нажатие педали руля направления обеспечивает полное отклонение руля. У высокоскоростных самолетов, для которых необходимо большое отклонение руля направления на низкой скорости, на высокой скорости полное отклонение руля вызывает избыточные нагрузки на конструкцию. Для предотвращения этого в систему управления рулем направления может быть включен редуктор. Это может быть редуктор с одной зубчатой передачей, который обеспечивает меньшее отклонение руля при полном нажатии педали управления выше определенной скорости полета, или прогрессивный редуктор, который обеспечивает уменьшение отклонения руля направления при увеличении скорости.
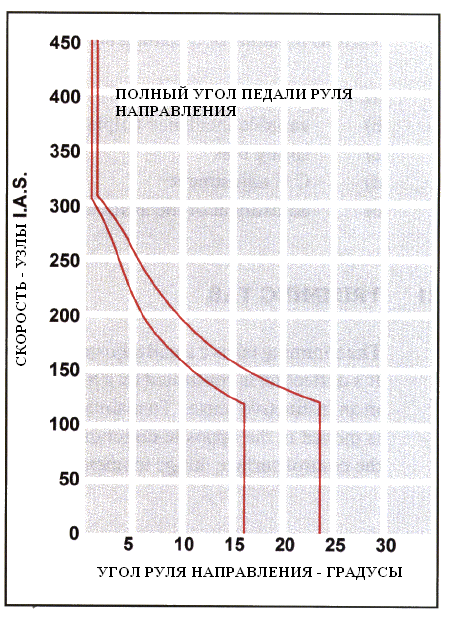
Рис. 8.14
ТРИММИРОВАНИЕ
Триммирование самолета происходит, когда он поддерживает высоту и скорость полета без вмешательства пилота в органы управления. Если необходимо отклонить поверхность управления для поддержания равновесия самолета от пилота требуется приложить усилие на орган управления в кабине для удержания поверхности в отклоненном положении. Это усилие может быть сведено к нулю с помощью работы триммеров. Триммирование самолета по тангажу требуется в результате следующих факторов:
а) Изменение скорости;
b) Изменение тяги;
с) Изменение положения ЦТ.
Триммирование по рысканию будет необходимо в следующих условиях:
а) У многодвигательного самолета при ассиметричной тяге;
b) В результате изменения момента вращения винта.
Триммирование по крену менее необходимо, но может потребоваться при ассиметричной конфигурации или при поперечном смещении ЦТ.
МЕТОДЫ ТРИММИРОВАНИЯ
Применяются различные методы триммирования, основные перечислены ниже:
а) Триммер;
b) Управляемый стабилизатор;
с) Пружинная загрузка;
d) Регулировка положения ЦТ;
е) Автомат загрузки.
ТРИММЕР
Триммер представляет собой небольшую регулируемую поверхность на задней кромке основной поверхности управления. Его отклонение контролируется рулем управления триммером или переключателем в кабине, обычно настроенный на работу в интуитивном режиме. Для поддержания основной поверхности управления в требуемом положении триммер перемещается в противоположном направлении, пока его шарнирный момент не уравновесит шарнирный момент основной поверхности.
При работе триммера несколько уменьшается сила, создаваемая основной поверхностью управления.
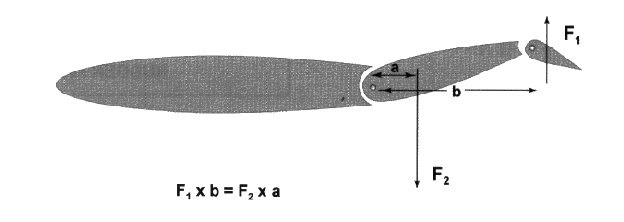
Рис. 8.15
ФИКСИРОВАННЫЕ ТРИММЕРЫ
Некоторые триммеры не регулируются в полете, но могут регулироваться на земле для корректировки перманентного несбалансированного состояния. Они обычно расположены на элеронах. Принцип их работы аналогичен регулируемым триммерам.
УПРАВЛЯЕМЫЙ СТАБИЛИЗАТОР
Данная система триммирования может использоваться как для стабилизатора с ручным управлением, так и для стабилизатора с силовым приводом. В ручной системе нагрузка на руль высоты ощущается на колонке управления, а нагрузка на стабилизатор – нет. Для триммирования угол установки стабилизатора регулируется с помощью руля управления триммером, пока полная нагрузка на стабилизатор и руль высоты при свободном руле высоты не уравновесит требуемую балансировочную нагрузку. В качестве альтернативы руля управления триммером управляемый стабилизатор может контролироваться с помощью переключателей, работающих в паре. Они обычно расположены на штурвале либо это может быть пара рычагов на центральной консоли. Один переключатель или рычаг управляет питанием, другой контролирует направление перемещения стабилизатора. Оба переключателя должны перемещаться одновременно для триммирования самолета. Это создано для предотвращения случайной активации системы продольного триммирования.
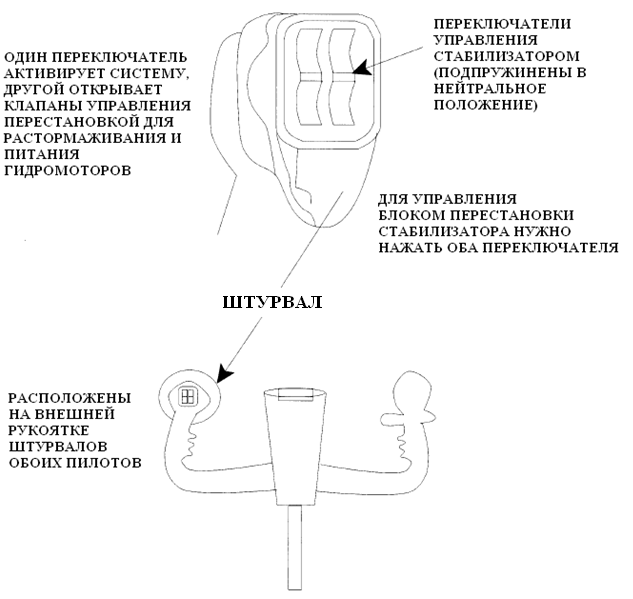
Рис. 8.16. Орган управления стабилизатором

Рис. 8.17
Данная система имеет следующие основные достоинства:
а) В состоянии триммирования сопротивление меньше, т.к. аэродинамический профиль имеет более обтекаемую форму;
b) Триммирование не уменьшает диапазон управления по тангажу, т.к. руль направления находится примерно в нейтральном положении при триммировании самолета.
В системе управления с силовым приводом нагрузка на руль высоты не передается на колонку управления, но триммирование с помощью изменения угла установки стабилизатора также может применяться, т.к. дает описанные выше преимущества. Величина требуемого триммирования будет зависеть от положения ЦТ, а рекомендуемые настройки стабилизатора будут даны в Руководстве по ТО самолета. Очень важно правильно задать настройки перед взлетом, т.к. неправильные настройки могут дать либо превышение скорости тангажа при вращении самолета, что может вызвать хвостовые рывки, либо очень большие усилия на колонке управления при вращении, что приводит к увеличению дистанций разбега при взлете.
ПРУЖИННАЯ ЗАГРУЗКА
В системе триммирования с пружинной загрузкой для снятия нагрузки удержания колонки управления пилота применяется сила пружины с регулируемой затяжкой. Для данной системы не требуется триммер.
РЕГУЛИРОВКА ПОЛОЖЕНИЯ ЦТ
Если органы управления полетом применяются для триммирования, это приводит к увеличению сопротивления из-за отклонения поверхностей. Несбалансированный момент тангажа можно уменьшить с помощью перемещения ЦТ ближе к центру давления (ЦД), что снижает требуемую балансировочную нагрузку и сопротивление, связанное с ней. Это дает увеличение крейсерской дальности. Перемещение ЦТ обычно осуществляется с помощью перекачки топлива между баками в носовой и хвостовой части самолета.
ТРИММИРОВАНИЕ АВТОМАТА ЗАГРУЗКИ
Если органы управления имеют силовой привод, обратной связи от нагрузки на поверхность к органам управления в кабине не существует. Нагрузку на органы управления в кабине нужно создавать искусственно. При перемещении поверхности автомат загрузки создает силу сопротивления перемещению органа управления в кабине. Для снятия этой силы (т.е. триммирования) можно отрегулировать нулевой уровень автомата загрузки, чтобы он более не давал никакой нагрузки.
ТРИММИРОВАНИЕ ПО ЧИСЛУ М
Центр давления крыла перемещается назад, когда самолет достигает высокой дозвуковой скорости, что создает большой момент пикирования, известный как «затягивание в пике». Важно, чтобы самолет был оборудован автоматической системой корректировки такого изменения высоты. Система называется «триммированием по числу М» и разработана для работы независимо от применения системы автопилотирования или иной автоматической системы управления полетом. Система определяет увеличение скорости выше заданной величины числа М, серво система выполняет соответствующее перемещение горизонтального стабилизатора или изменение центровки для поддержания сбалансированной полетной конфигурации. См. рис. 8.19.