

UP_nadezhnost_i_diagnostika
.Pdf
|
|
|
|
|
|
|
|
|
Инвариант |
– |
это в |
данном |
||
|
u |
|
B(s) |
|
|
y |
случае некоторая |
характеристика |
||||||
|
|
|
|
A(s) |
|
|
|
|
объекта, |
|
сохраняющая |
свое |
||
|
|
|
|
|
|
|
|
|
значение |
для |
работоспособного |
|||
|
BM (s) |
|
|
|
|
|
AM (s) |
|
||||||
|
|
|
|
|
|
|
объекта |
и |
|
изменяющая это |
||||
|
|
|
|
|
|
|
|
|
значение при его отказе. При этом |
|||||
|
|
|
- |
|
|
|
|
функция СД состоит в вычислении |
||||||
|
|
|
|
|
r |
значения |
|
|
|
используемого |
||||
|
|
|
|
|
инварианта и в сравнении этого |
|||||||||
|
|
|
|
|
|
|
|
|
||||||
Рис. 6.2. Функциональное диагностирование |
значения |
с |
эталоном (рис. 6.1). |
|||||||||||
с использованием соотношений паритета. |
При поиске |
отказов необходимо, |
||||||||||||
|
|
|
|
|
|
|
|
|
чтобы |
|
разным |
отказам |
||
соответствовали бы разные значения инварианта. В качестве инвариантов могут выступать, например:
-полюса передаточной функции;
-элементы системных матриц;
-значения частотных характеристик на фиксированных частотах;
-отсчеты импульсной и переходной функций в фиксированные моменты времени.
Второе направление иллюстрируется на рис.6.2, где предполагается, что диагностируемая система линейна и описана в операторной форме. Видно, что в этом случае невязка формируется при сопоставлении преобразованных входа u и выхода y системы.
Наконец, третье направление предполагает, что невязка формируется при сопоставлении выходов диагностируемой системы и ее модели, которая
|
|
|
может |
формироваться |
на |
|||
|
|
|
компьютере. |
|
Простейшая |
|||
u |
|
y |
иллюстрация |
|
этого |
подхода |
||
|
Система |
r |
приведена |
на |
рис. |
6.3, |
где |
|
|
|
предполагается, |
что система и ее |
|||||
|
|
- |
||||||
|
|
модель, стартуя из одинаковых |
||||||
|
|
|
||||||
|
Модель |
|
состояний, |
|
формируют |
при |
||
|
системы |
yм |
номинальном |
|
|
поведении |
||
|
|
совпадающие |
последовательности |
|||||
|
|
|
||||||
|
|
|
||||||
|
|
|
выходов, а при появлении отказов |
|||||
Рис. 6.3. Функциональное диагностирование |
в системе эти последовательности |
|||||||
с использованием модели системы. |
расходятся |
|
|
(генерируется |
||||
|
|
|
ненулевая невязка r). |
|
|
|||
В рамках этого |
направления |
предложен |
целый ряд |
методов, |
||||
ориентированных как на обнаружение отказов, так и на их поиск. Причем могут рассматриваться как линейные, так и нелинейные системы. Центральное место в известных методах занимает использование наблюдателей, которые могут строиться на основе различных принципов. Обычно выделяют наблюдатели состояния и выхода.
91

На рис. 6.4 представлен случай использования наблюдателя состояния |
|||||||||||||||
по отношению к линейной системе: |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
x(t) F x(t) Gu(t), |
y(t) H x(t). |
|
|
|
|
|
|
|||||
Определяющим свойством подобных наблюдателей является наличие |
|||||||||||||||
обратной связи по невязке, а также совпадение его системных матриц с |
|||||||||||||||
системными матрицами диагностируемой системы. В результате этих |
|||||||||||||||
свойств система и модель могут стартовать из разных состояний, и по |
|||||||||||||||
прошествии переходного процесса не только формируют совпадающие |
|||||||||||||||
выходные последовательности при номинальном поведении системы и |
|||||||||||||||
расходящиеся при |
наличии |
в системе |
отказов, но |
при |
этом |
также |
в |
||||||||
|
|
|
|
|
|
|
|
|
наблюдателе формируется |
||||||
u |
|
|
|
|
|
y |
|
|
оценка состояния системы |
||||||
|
|
Система |
|
|
|
|
ˆ |
|
|
|
|
|
|
||
|
|
|
|
|
|
x . |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
Остановимся |
более |
|||||
|
|
|
|
|
r |
|
|
|
подробно |
на |
вопросах |
||||
|
|
|
|
L |
|
|
|
синтеза |
|
наблюдателя |
|||||
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
состояния, |
поскольку далее |
|||||
|
|
|
|
|
xˆ |
|
|
|
при изложении |
материала |
|||||
|
G |
|
|
∫ |
H |
|
|
|
|||||||
|
|
|
|
|
|
будет использован именно |
|||||||||
|
|
|
|
|
|
yм |
|
|
|||||||
|
|
|
|
|
|
|
|
этот |
тип |
наблюдателя. |
|||||
|
|
|
|
|
|
|
|
|
|||||||
Наблюдатель |
|
|
F |
|
|
|
|
Процедура |
|
синтеза |
|||||
|
|
|
|
|
|
|
|
|
наблюдателя состояния для |
||||||
Рис. 6.4. Функциональное диагностирование с |
|
линейной |
|
системы |
|||||||||||
использованием наблюдателя состояния. |
|
|
известна, |
однако |
|
для |
|||||||||
|
|
|
|
|
|
|
|
|
полноты |
|
|
изложения |
|||
приведем ее основные моменты. Для синтеза наблюдателя необходимо |
|||||||||||||||
определить лишь матрицу обратной связи |
L . Она определяется, |
исходя из |
|||||||||||||
желаемого поведения ошибки оценивания. В соответствии со структурой на |
|||||||||||||||
рис.6.5, если диагностируемая система и наблюдатель стартуют из разных |
|||||||||||||||
состояний, то в наблюдателе формируется оценка вектора состояния |
|||||||||||||||
системы. |
Причем |
поведение |
ошибки |
оценивания |
e(t) x(t) xˆ(t) |
||||||||||
определяется уравнением |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
Gu(t) L(Hx(t) Hxˆ(t)) . |
|
|
|||||
e(t) x(t) xˆ(t) F x(t) Gu(t) F xˆ(t) |
|
|
|||||||||||||
|
|
|
|
Fe(t) LHe(t) (F LH )e(t). |
|
|
|
|
|
|
|||||
Решение этого уравнения имеет вид: |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
e(t) e(t0 ) exp(( F LH )(t t0 )) , |
|
|
|
|
|
|
|||||
где exp(( F LH )(t t |
|
)) E |
(F LH ) t |
(F LH )2 (t) t 2 |
|
(F LH )3 (t) t |
3 |
|
|||||||
0 |
|
|
2! |
|
3! |
|
... |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Безусловно, эта ошибка должна достаточно быстро стремиться к нулю. |
|||||||||||||||
Для этого |
матрица |
|
F LH |
должна быть |
|
устойчивой, т.е. вещественные |
|||||||||
части корней ее характеристического многочлена (собственных чисел) |
|
|
|||||||||||||
|
|
|
|
|
| F LH E | 0 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
92 |
должны принимать отрицательные значения. Для случая, когда исходная система линейна, стационарна и наблюдаема алгоритм выбора матрицы L известен и достаточно прост [1]. Он использует представление диагностируемой динамической системы в идентификационной канонической форме. Напомним свойства этого представления.
Сначала приведем короткую информацию об эквивалентных преобразованиях линейных динамических систем. Пусть рассматриваемая система описывается уравнениями:
x1 (t) F1 x1 (t) G1 u(t), |
y(t) H1 x1 (t). |
Запишем эти уравнения в другой системе координат:
x2 (t) F2 x2 (t) G2 u(t), |
y(t) H 2 x2 (t). |
|||
Пусть новая система координат связана с исходной неособенной |
||||
матрицей преобразования T, т.е. |
x2 |
Tx1 . Тогда уравнения для |
||
преобразованной системы приобретают вид: |
|
|||
Tx1 (t) F2 Tx1 (t) G2 u(t), |
y(t) H 2Tx1 (t). |
|||
Отсюда, приравнивая выражения для выходов исходной и |
||||
преобразованной систем, получаем: |
|
|
|
|
H |
2 |
H T 1 . |
||
|
|
1 |
|
|
Приравнивая производные от этих выходов, получаем остальные |
||||
выражения: |
|
|
|
|
F T 1F T, |
G T 1G |
|||
2 |
|
1 |
2 |
1 |
|
g1 |
|
g2 |
|
|
gn |
|
|
|
u |
|
x1 |
|
|
x2 |
|
xn |
yn |
|
+ |
∫ |
+ |
∫ |
… |
+ |
∫ |
hn |
||
|
|||||||||
|
|
|
|
|
|
-α1 |
|
-α 2 |
|
-α n |
|
|
|
|
|
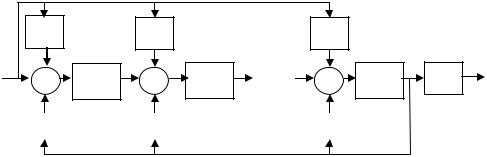
Рис. 6.5. Идентификационная каноническая форма системы со скалярным выходом.
Выбирая соответствующим образом матрицу преобразования T, можно получать эквивалентные описания системы с характерными свойствами, которые называются каноническими формами. Одной из таких форм является идентификационная каноническая форма. Напомним ее свойства.
Для начала, предположим, что система имеет скалярный выход, а также для простоты и скалярный вход. Тогда она имеет структуру (рис. 6.5), в которой интеграторы вытянуты в цепочку при единственной обратной связи с выхода последнего интегратора.
При этом, например, для номинального состояния матрицы диагностируемой системы, а, значит, и соответствующие матрицы наблюдателя имеют следующий вид.
93

|
|
|
0 ... |
0 |
1 |
|
g1 |
|
|
|
|
|
|
|
|
|
|
l1 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
1 ... |
0 |
2 , |
G g2 |
, |
H 0 ... |
0 |
h |
|
, |
L l2 |
, |
|||||||||
|
|
... ... |
... |
... |
|
... |
|
|
|
|
|
|
|
n |
|
... |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 ... |
1 |
n |
gn |
|
|
|
|
|
|
|
|
|
|
ln |
|
|||||
где j | j |
|
|
– |
коэффициенты характеристического |
многочлена системы |
||||||||||||||||||
1, n |
|||||||||||||||||||||||
|
F |
( ) λn α |
n |
λn 1 |
... α . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
При такой структуре матриц |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
0 |
... |
0 |
l1hn |
|
|
0 |
... |
0 |
( 1 l1hn ) |
|
||||||
|
|
|
|
|
|
|
0 |
... |
0 |
l h |
|
|
|
1 |
... |
0 |
( |
|
|
l |
h ) |
|
|
|
|
LH |
|
|
|
2 n , F LH |
|
|
|
|
|
2 |
|
|
2 n . |
|
|||||||
|
|
|
|
|
|
... |
... |
... ... |
|
|
... ... ... |
|
|
|
... |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( n |
|
|
|
|
||
|
|
|
|
|
|
|
0 |
... |
0 |
ln hn |
|
|
0 |
... |
1 |
|
ln hn ) |
|
|||||
|
|
Таким образом, матрица F LH имеет вид сопровождающей матрицы, |
|||||||||||||||||||||
где последний столбец составлен из коэффициентов характеристического |
|
многочлена |
' j | j 1, n . Назначив для характеристических чисел этой |
матрицы желаемые значения, обеспечивающие необходимую скорость стремления к нулю ошибки оценивания, можно определить коэффициенты характеристического многочлена для F LH , а затем и элементы матрицы
обратной связи на основе соотношений j |
l j hn ' j |
j 1, n . |
В случае, когда диагностируемая система имеет много выходов, процедура определения матрицы обратной связи усложняется [1], хотя последовательность шагов остается прежней. Также, прежде всего, диагностируемую систему надо представить в идентификационной канонической форме, которая принимает более сложный вид (рис. 6.6). Она содержит уже не одну цепочку интеграторов с обратной связью с последнего интегратора, а несколько – по числу выходов системы. Эти цепочки с обратными связями на рисунке представлены прямоугольниками,
обозначенными F j . Кроме того, при упорядочивании этих компонент
(цепочек) по убыванию размерности выход каждой компоненты участвует в формировании выходов всех последующих. В результате, например, для номинального состояния матрицы системы, а, значит, и соответствующие матрицы наблюдателя имеют вид:
|
F 1 |
0 |
... |
0 |
|
|
|||
|
|
0 |
F |
2 |
... |
0 |
|
|
|
F |
|
|
|
, |
|||||
... ... |
... |
... |
|||||||
|
|
||||||||
|
|
0 |
0 |
... |
|
|
|
||
|
|
F p |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
... |
0 |
|
|
|
|
|||
F |
j |
|
|
1 |
... |
0 |
|
... ... ... |
|||||
|
|
|
|
0 |
... |
1 |
|
|
|
|
|||
|
|
|
|
|
|
|
j |
|
|||
|
1 |
|
|
|
|
|
j |
|
|
2 |
, n j n , |
|||
|
|
|
|
p |
... |
|
|
|
j 1 |
|
|
|
|
|
j |
|
|||
|
|
j |
|
|
|
n |
|
|
|
|
|
|
|
|
94

|
|
G0,1 |
|
|
|
|
h11 |
0 |
|
... |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
G0,2 |
|
|
~ |
~ |
h21 |
h22 |
... |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
, H HV , H |
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
... |
|
|
|
|
|
|
|
... |
... |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
... ... |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
G0, p |
|
|
|
|
hp1 |
hp 2 |
... |
hpp |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 ... |
0 |
1 |
0 ... |
0 |
... |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 ... |
0 |
0 |
0 ... |
1 |
... |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
... ... |
... ... ... ... ... |
... |
... |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
0 ... |
0 |
0 |
0 ... |
0 |
... |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
В матрице V единицы стоят в |
||||||||||||
u1 |
|
|
|
|
|
|
xn1 |
|
y1 |
|
столбцах |
|
n . |
|
с |
|
номерами |
|||||||
|
|
… |
|
|
F1 |
|
|
|
n ,n ,...,n |
|
|
|
|
|
Причем |
|||||||||
|
|
|
|
|
|
|
y |
|
p |
|
|
|
|
|||||||||||
u2 |
|
|
|
|
|
|
|
|
2 |
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
… |
G |
|
… |
|
F |
|
xn2 |
~ |
… |
|
nk |
n j , |
k 1, p. |
Использование |
||||||||||
|
|
|
|
H |
|
|||||||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
j 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
um |
|
|
|
|
|
|
|
|
|
этой матрицы |
позволяет |
ввести |
|
в |
||||||||||
|
|
|
|
… |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
~ |
|||||||||||||||
|
|
|
|
|
|
|
xnp |
|
|
|
соотношения |
|
|
матрицу |
|
|
, |
|||||||
|
|
… |
|
Fp |
|
|
|
|
|
|
|
H |
||||||||||||
|
|
|
|
|
|
|
|
преобразующую |
вектор |
значений |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Рис. 6.6. Структура идентификационной |
|
последних |
|
|
|
|
интеграторов |
|||||||||||||||||
|
xn1, xn2 ,..., xnp |
в цепочках в выходной |
||||||||||||||||||||||
канонической |
формы |
динамической |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
системы. |
|
|
|
|
|
|
|
|
вектор y1, y2 ,..., yp системы. |
Для нас |
||||||||||||||
важно, что ввиду неособенности этой матрицы существует возможность |
||||||||||||||||||||||||
определения вектора xn1, xn2 ,..., xnp |
по значению вектора |
|
y1, y2 ,..., yp . Отсюда |
|||||||||||||||||||||
следует, что задачу определения обратной связи в наблюдателе мы можем |
||||||||||||||||||||||||
решать для каждой компоненты отдельно по выше изложенному алгоритму |
||||||||||||||||||||||||
для системы с одним выходом. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
Синтез наблюдателей выхода осуществляется по другим правилам. |
|||||||||||||||||||||||
Теория построения наблюдателей выхода развита достаточно хорошо. На |
||||||||||||||||||||||||
рис. 6.7 представлен случай, когда с помощью наблюдателя выхода |
||||||||||||||||||||||||
диагностируется линейная система, однако известны алгоритмы построения |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
таких |
|
наблюдателей |
и |
для |
|||||||||
|
u |
|
|
|
|
|
|
y |
|
|
нелинейных |
систем. |
В |
общем |
||||||||||
|
|
|
|
|
|
|
|
|
случае наблюдатель выхода имеет |
|||||||||||||||
|
|
|
|
|
Система |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
меньшую |
размерность, |
нежели |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
диагностируемая система. В связи |
|||||||||||||
|
|
|
|
|
|
K |
|
|
|
|
с этим на рисунке матрицы |
|||||||||||||
|
|
|
|
|
|
|
|
|
T |
|
наблюдателя |
|
имеют |
|
другие |
|||||||||
|
|
|
|
|
|
|
|
|
r |
обозначения |
|
(A, |
B |
|
и |
C). |
||||||||
|
|
|
|
|
|
|
|
|
Возможность |
|
получения |
для |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
наблюдателя |
|
|
|
меньшей |
||||||||||
|
B |
|
|
|
∫ |
C |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
размерности |
|
|
связана |
|
|
|
с |
||||||||||
|
|
|
|
|
|
|
|
yм |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
использованием |
в |
|
|
нем |
|||||||||||
|
|
|
|
|
|
A |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
преобразователей T и K. Первый |
||||||||||||||
|
Наблюдатель |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Рис. 6.7. Функциональное диагностирование |
|
|
|
|
|
|
|
|
|
|
|
|
95 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
с использованием наблюдателя выхода. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||

из них сужает многообразие выходных последовательностей диагностируемой системы и тем самым создает предпосылки для реализации суженного многообразия наблюдателем меньшей размерности. Второй преобразователь служит той же цели, увеличивая для наблюдателя информацию о диагностируемой системе. Необходимым условием применения этих наблюдателей и одновременно их недостатком является старт диагностируемой системы и наблюдателя из согласованных состояний. В противном случае наблюдатель будет формировать ненулевую невязку r (сигнал отказа) при номинальной работе диагностируемой системы. Случай, когда преобразователь K отсутствует, а преобразователь T реализует тождественное отображение, называют дублированием.
Диагностирование с использование наблюдателей выхода применяется не только в отношении непрерывных и дискретных, но также и цифровых систем. Последний случай активно исследовался в 70-х и 80-х годах прошлого столетия. Однако предложенные тогда методы в настоящее время в определенной степени утратили свою значимость из-за практической нецелесообразности решения задач ФД для достаточно простых устройств, которые принято описывать автоматной моделью. Тем не менее, для полноты картины коротко опишем и этот подход.
Существенную роль в этом подходе [17] играет использование результатов теории помехоустойчивого кодирования двоичной информации в каналах связи. При этом под кодом понимается набор двоичных кодовых слов, которыми представляется передаваемая по каналу связи информация. При этом каждое передаваемое слово размерности n, кроме k информационных разрядов, содержит n – k дополнительных (контрольных), которые связаны с информационными некоторыми (обычно линейными) контрольными соотношениями. При передаче через канал обмена какие-то разряды слова могут искажаться под воздействием помех. Предполагается, что в результате должны нарушаться использованные при формировании кода контрольные соотношения, поэтому, проверяя их при приеме, можно обнаружить или даже исправить возникшие искажения. Определение правил
выбора контрольных соотношений и составляет содержание теории помехоустойчивого кодирования. На рис. 6.8 приведен пример кодирования исходного безызбыточного кода, содержащего восемь кодовых слов, представляющих некоторую, например, текстовую информацию. Искажение даже одного бита в любом кодовом слове будет превращать это слово в другое
96
также разрешенное слово, а, следовательно, оно будет незамеченным. Иначе обстоит дело в избыточном коде, приведенном на том же рисунке и полученном из предыдущего кода добавлением одного разряда. Причем значение дополнительного разряда дополняет число единиц исходного слова до четного. Формально в этом случае функция кодирования (контрольное соотношение) может быть записана следующим образом:
k
xk 1 K (x1, x2 ,..., xk ) xi ,
i 1
где использована операция суммирования по модулю два (исключающее ИЛИ). Любое искажение одного бита в таком кодовом слове будет замечено при проверке на четность.
При формировании кода в общем случае для заданной максимальной кратности t возникающих ошибок вводят понятие расстояния между кодовыми словами (расстояние Хэмминга), определяемого как число разрядов сравниваемых кодовых слов, различающихся своими значениями. Формально это записывается так:
k |
|
d Х (xi,k |
x j,k ) . |
i 1 |
|
При этом нетрудно догадаться, что для обнаружения ошибок кратности, не превышающей t, кодовые слова должны находится на расстоянии d Х t 1. В этом случае возникающие ошибочные слова никогда не
совпадут ни с каким кодовым словом. Эта ситуация иллюстрируется на рис. 6.8 а, где окружностями условно изображены множества ошибочных слов, в которые могут переходить кодовые слова 1001 и 1010, представленные центрами этих окружностей. Другим должно быть расстояние между кодовыми словами, когда ставится цель не только обнаруживать, но и исправлять все ошибки в пределах заданной кратности t. Это расстояние должно удовлетворять неравенству d Х 2t 1. В этом случае видно (рис. 6.9
б), что окружности ошибочных слов не пересекаются между собой, а, значит, при приеме любое ошибочное слово может быть соотнесено с соответствующим кодовым словом.
97

1001 |
1010 |
1101 |
1010 |
|
|
|
k 1 |
а) |
|
|
б) |
|
|
|
|||
dХ |
|
d |
Х |
2k 1 |
|
|
|
|
|
|
Рис. 6.9. Иллюстрация подходов к обнаружению (а) и исправлению (б) ошибок.
Этот подход широко применяется в каналах обмена современных информационно-управляющих систем. Упрощенно его реализация представлена на рис. 6.10. Здесь в изображении линии связи опущены модули приема/передачи информации, и она представлена в виде совокупности линий (проводов), по каждой из которых передается один бит (разряд) информации. Описанный подход при желании можно трактовать как функциональное диагностирование параллельного канала обмена. Заметим, что в случае последовательного канала обмена информационные и проверочные символы передаются по каналу обмена последовательно во времени.
x1 |
|
|
|
x 1 ' |
||
x 2 |
… |
|
|
x 2 ' |
||
x k |
|
|
… x k ' |
|||
|
|
|
|
|
|
|
… |
|
|
К |
|
|
|
|
|
|
|
|
||
|
|
Линия связи |
|
|
|
|
|
|
|
|
|
|
|
|
x k 1 |
|
|
… |
|
|
|
|
|
|
|
|
|
К |
|
… |
|
СС |
|
ε |
|
|
|
|
|
||
|
x n |
|
|
|
|
|
|
Декодирование |
|||||
|
|
|||||
|
|
|
информации |
|||
Рис. 6.10. Функциональное диагностирование шины компьютера.
Применение идеи помехоустойчивого кодирования для решения задачи ФД автоматов сводилось к следующему. Помехоустойчивыми кодами кодировались внутренние состояния автомата, а реализация средств ФД представляла собой реализацию контрольных разрядов кода. Заметим, что в случае нелинейных автоматов контрольные соотношения оказывались также нелинейными.
В заключении данного параграфа заметим, что одним из важных вопросов, решаемых при синтезе средств ФД, является выбор или разработка
98
алгоритма обработки невязки. Наличие неопределенностей, сопровождающих решение задачи ФД, делает решение этого вопроса непростым. Требуемое качество может достигаться двумя путями. Вопервых, оно может быть получено путем дополнительной обработки формируемого сигнала невязки. Такая обработка может производиться, например, путем усреднения значения сигнала невязки на некотором интервале времени, в результате чего несколько снижается эффект действия возмущений.
Второй путь состоит в использовании адаптивного порога, поскольку редко удается найти фиксированный порог, который бы обеспечил удовлетворительное качество диагностики одновременно для всех режимов работы системы. Это затруднение может быть преодолено за счет применения адаптивного порога, величина которого устанавливается с учетом измеряемых сигналов системы. Наиболее распространенный подход к выбору адаптивного порога состоит в следующем. Для текущих значений измеряемых сигналов находится верхняя граничная оценка величины невязки с учетом всех возможных значений возмущений и ошибок модели. Эта оценка и принимается в качестве значения адаптивного порога. Описанный выбор порога гарантирует качество диагностики, однако на практике такой порог может оказаться завышенным, так как он ориентирован на наиболее неблагоприятное сочетание значений возмущений и ошибок модели.
6.2.Функциональное диагностирование при поиске структурных нарушений
При решении задачи поиска отказов (диагностике) широко применяются методы ФД, основанные на использовании банков (наборов) наблюдателей, причем как наблюдателей выхода, так и наблюдателей состояния. Далее будет рассматриваться второй случай. При этом каждый из наблюдателей
(рис. 6.11) Oi настроен на |
одно из M |
технических состояний системы |
|
(работоспособное S0 – O0, неработоспособное S1 с 1-м отказом – O1, |
|||
неработоспособное S 2 со 2-м отказом – |
O2 |
и т.д.). Формируются в общем |
|
случае векторные невязки ν0, |
ν1, …, |
νM |
между наблюдаемым выходом |
динамической системы и выходом каждого из наблюдателей. По результатам их анализа принимается решение о техническом состоянии диагностируемой системы. При этом, очевидно, что наблюдателю, чьи настройки адекватны текущему техническому состоянию, будет соответствовать наименьшая невязка. В данном случае каждый из наблюдателей банка формирует оценку состояния диагностируемой системы независимо от других наблюдателей. В связи с этим данный метод далее будем называть диагностированием на основе банка независимых наблюдателей, противопоставляя его методу на основе банка взаимодействующих наблюдателей, о котором пойдет речь в параграфах 6.3 и 6.4.
В литературе по ФД обычно принято рассматривать одну из двух возможных постановок задачи – диагностирование в пространстве сигналов и
99

|
|
|
|
|
диагностирование в пространстве |
||||||
u |
Диагностируемая |
|
y |
параметров [3, 4]. Далее каждая |
|||||||
|
из |
них |
будет |
рассмотрена |
|||||||
|
|
||||||||||
|
динамическая система |
|
|||||||||
|
|
(параграфы 6.3 и 6.4). Эти |
|||||||||
|
|
|
|
|
|||||||
Средства |
функционального |
|
постановки |
|
различаются |
||||||
|
используемой моделью отказа. В |
||||||||||
диагностирования |
|
|
|||||||||
|
O0 |
|
|
|
первом |
случае |
|
|
отказ |
||
|
|
|
|
моделируется |
дополнительным |
||||||
|
|
|
|
|
|||||||
|
|
O1 |
|
|
слагаемым |
в |
правой |
|
части |
||
|
|
··· |
OM |
|
уравнения динамики, |
а во втором |
|||||
0 |
1 |
M |
|
– |
отклонением |
некоторого |
|||||
|
|
||||||||||
|
|
параметра |
|
системы |
|
от |
|||||
|
|
|
|
|
|
|
|||||
|
Принятие решения |
|
|
номинального значения. |
Однако |
||||||
|
|
об отказе |
|
|
класс отказов может быть весьма |
||||||
|
|
|
|
|
|||||||
|
|
Решение об отказе |
|
разнообразным. |
Он |
может |
|||||
|
|
|
|
|
включать |
отказы |
достаточно |
||||
Рис. 6.11. Функциональное диагностирование |
произвольного |
вида, |
|
не |
|||||||
с использованием банка наблюдателей. |
|
представимые |
упомянутыми |
||||||||
|
|
|
|
|
|||||||
|
|
|
|
|
традиционными |
моделями. |
К |
||||
таким отказам могут относиться либо различного рода обрывы и короткие |
|||||||||||
замыкания межэлементных связей системы, либо отказы, приводящие к |
|||||||||||
изменению размерности системы, и т.п. Далее такие отказы будем называть |
|||||||||||
структурными нарушениями. В рамках данного параграфа модель отказа не |
|||||||||||
будет конкретизироваться. Единственным требованием в этой части будет |
|||||||||||
априорная известность для разработчика списка рассматриваемых отказов. |
|||||||||||
Рассматриваемый алгоритм ФД отличается от обсуждаемых далее не только |
|||||||||||
тем, что ориентирован на структурные нарушения, но и тем, что использует |
|||||||||||
традиционную структуру банка независимых наблюдателей (рис. 6.11), когда |
|||||||||||
оценка в каждом наблюдателе формируется независимо. В последующих |
|||||||||||
параграфах будут рассмотрены и другие варианты организации банков. |
При |
||||||||||
этом будет полезно соотносить каждый очередной вариант ФД с |
|||||||||||
классификацией на рис. 6.12. |
|
|
|
|
|
|
|
|
|
||
Итак, обсудим диагностирование структурных нарушений. Для |
|||||||||||
описания таких отказов удобно обратиться к структурной схеме системы. |
|||||||||||
Пример описания системы структурной схемой, заимствованный из работы |
|||||||||||
[13], приведен на рис. 6.13 а. Он представляет собой систему управления |
|||||||||||
положением космической ракеты-носителя. Угловое положение |
|||||||||||
регулируется за счет изменения угла , характеризующего наклон двигателей |
|||||||||||
относительно оси ракеты. Примером структурного нарушения может |
|||||||||||
служить обрыв обратной связи по скорости (рис. 6.13 б). |
|
|
|
|
|||||||
В качестве объекта диагностирования рассматривается стационарная, |
|||||||||||
устойчивая динамическая система. Для определенности будем считать, что |
|||||||||||
она описана разностными уравнениями, а именно, в случае линейной |
|||||||||||
системы: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
100 |