

Тестовое диагностирование линейных дискретных устройств. Абстрактный подход
Рассмотрим задачу тестового диагностирования в случае, когда разработчик не может или не хочет при построении теста для устройства в целом воспользоваться (как это было в подразделе 5.2.2) тестом для его безынерционных преобразователей и определяет класс отказов как всевозможные искажения матриц системы. При этом будем предполагать, что система по-прежнему наблюдаема и управляема и что любой отказ из рассматриваемого класса приводит лишь к искажению матриц диагностируемой системы, но не выводит ее из класса линейных.
Обсуждаемый
тест будет состоять из двух частей
![]() и
и![]() .
Обе части строятся по описанию исправной
системы. Рассмотрим первую часть, под
воздействием которой система
последовательно проходит черезnсостояний
.
Обе части строятся по описанию исправной
системы. Рассмотрим первую часть, под
воздействием которой система
последовательно проходит черезnсостояний![]() .
Пусть эти состояния образуют базис
пространства состояний системы. После
установки в каждое из этих состояний
система находится в свободном движении
(вход равен нулю) на протяженииnтактов, т.е.
.
Пусть эти состояния образуют базис
пространства состояний системы. После
установки в каждое из этих состояний
система находится в свободном движении
(вход равен нулю) на протяженииnтактов, т.е.![]() имеет вид:
имеет вид:
![]() ,
,
где
![]() - установочная последовательность в
- установочная последовательность в![]() ,
,![]() - входная последовательность изnнулей. Последовательность
- входная последовательность изnнулей. Последовательность![]() существует, т.к. диагностируемая система
управляема.
существует, т.к. диагностируемая система
управляема.
Вторая
часть теста
![]() содержитmфрагментов (по
числу входов), каждый из которых состоит
из входного набора
содержитmфрагментов (по
числу входов), каждый из которых состоит
из входного набора![]() и последовательности
и последовательности![]() ,
т.е.
,
т.е.![]() имеет вид:
имеет вид:
![]()
В
свою очередь, вектор
![]() состоит из нулевых компонент, кроме
одной, равной единице. При этом набор
состоит из нулевых компонент, кроме
одной, равной единице. При этом набор![]() содержит единицу вi-м
разряде.
содержит единицу вi-м
разряде.
Покажем,
что любое неэквивалентное (приводящее
к нарушению отображения вход-выход)
искажение матриц F,
G,
H
обнаруживается тестом
![]() .
Предположим противное, что в системе
присутствует искажение из рассматриваемого
класса отказов, а реакция системы верна.
.
Предположим противное, что в системе
присутствует искажение из рассматриваемого
класса отказов, а реакция системы верна.
Воспользовавшись
выражением (5.4) при нулевых входных
последовательностях, запишем выражения
для выходных последовательностей,
формируемых из состояний базиса ![]() :
:
![]() .
.
Объединяя эти выражения, получаем
![]()
где
![]() .
.
Аналогично
для неисправной системы имеем:
![]() .
Поскольку
.
Поскольку![]() ,
то
,
то
![]() .
(5.6)
.
(5.6)
При
этом из равенств
![]() и
и![]() следует
следует![]() ,
а с учетом (5.6)
,
а с учетом (5.6)![]() .
Отсюда
.
Отсюда![]() ,
а матрицы
,
а матрицы![]() и
и![]() связаны соотношением
связаны соотношением
![]() ,
(5.7)
,
(5.7)
где
R
– неособенная матрица. Поскольку
![]() ,
то
,
то
![]() (5.8)
(5.8)
или в развернутом виде:
 (5.9)
(5.9)
Приравнивая первые строки, получаем:
![]() .
(5.10)
.
(5.10)
Дополняя (5.9) одной строкой и рассматривая последние n строк, имеем:
![]()
Учитывая
![]() ,
получаем
,
получаем![]() .
.
Отсюда
![]() .
(5.11)
.
(5.11)
Покажем,
как получить соотношение для
![]() и
и![]() ,
опираясь на результаты тестирования в
части
,
опираясь на результаты тестирования в
части![]() .
Запишем выходную реакцию устройства
на последовательность
.
Запишем выходную реакцию устройства
на последовательность![]() воспользуемся соотношениями (5.4). Дополним
(5.4) одной строкой и рассмотрим последниеn
строк. Приравнивая выходные
последовательности, получаем:
воспользуемся соотношениями (5.4). Дополним
(5.4) одной строкой и рассмотрим последниеn
строк. Приравнивая выходные
последовательности, получаем:
![]() .
.
Воспользовавшись соотношениями (5.7), (5.8) и (5.11), получаем:
![]()
или
![]() .
.
Приравнивая
вторые слагаемые левой и правой частей
и умножая слева на
![]() ,
получаем:
,
получаем:
![]() . (5.12)
. (5.12)
Из выражений (5.7), (5.10), (5.11) и (5.12) следует, что исправная и неисправная системы являются эквивалентными, а, значит, наше предположение о наличии в диагностируемой системе неэквивалентного искажения неверно.
Таким
образом, тест
![]() обнаруживает любые неэквивалентные
искажения матриц диагностируемой
системы.
обнаруживает любые неэквивалентные
искажения матриц диагностируемой
системы.
Тестовое диагностирование аналоговых линейных устройств
Ранее обсуждавшиеся средства тестового диагностирования в случае аналоговых устройств могут быть реализованы по-разному. Если эти средства являются внешними, входящими, например, в состав некоторого стенда, на котором тестируется рассматриваемое устройство, то они могут быть исполнены на основе персонального компьютера (рис. 5.4).
При этом средства должны содержать ЦАП, преобразующий генерируемый в ПК цифровой тестовый сигнал в аналоговый, а также АЦП, преобразующий аналоговый сигнал реакции устройства в цифровой.
Методы
построения тестов могут быть различными.
Для линейных устройств может использоваться,
в частности, и частотный подход,
заключающийся в снятии амплитудно-частотной
характеристики устройства или в измерении
ее только на резонансных частотах.
Однако могут быть и другие подходы,
например, связанные с использованием
специальных режимов, в частности, режима
свободного движения устройства (так
н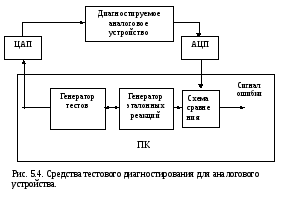 азываемое
модальное диагностирование). При
реализации этого метода можно обойтись
без ПК и реализовать его с использованием
встроенных средств. Рассмотрим его для
линейного устройства, которое описывается
матричным дифференциальным уравнением:
азываемое
модальное диагностирование). При
реализации этого метода можно обойтись
без ПК и реализовать его с использованием
встроенных средств. Рассмотрим его для
линейного устройства, которое описывается
матричным дифференциальным уравнением:
![]() ,
,
![]() ,
,
где
F(t)
–
![]() -
матрица;G(t)
–
-
матрица;G(t)
–
![]() -
матрица,
H(t)
–
-
матрица,
H(t)
–
![]() -
матрица, x(t)
n1-матрица
(n-мерный
вектор),
-
матрица, x(t)
n1-матрица
(n-мерный
вектор),
![]()
m1-матрица,
y(t)
p1-матрица.
m1-матрица,
y(t)
p1-матрица.
При этом в свободном движении уравнения упрощаются:
![]() ,
, ![]() , (5.13)
, (5.13)
Предварительно напомним некоторые сведения из теории обыкновенных дифференциальных уравнений. Рассмотрим матричное однородное линейное дифференциальное уравнение (систему однородных линейных дифференциальных уравнений) (5.13).
Пусть уравнение (5.13) стационарно, т.е. F(t)=F. Покажем, что его решение в этом случае имеет вид
![]() ,
(5.14)
,
(5.14)
где экспонента с матричным показателем представляется в виде бесконечного ряда
![]() (5.15)
(5.15)
Из (5.15) следует очевидное выражение для производной по t от матричной экспоненты
![]() .
.
Продифференцировав обе части равенства (5.16) и подставив результат вместе с исходным выражением в (5.13), получим тождество. Таким образом, выражение (5.14) является решением уравнения (5.13).
Теперь вспомним понятия собственного вектора и собственного числа. Собственный вектор h матрицы F – это вектор, в результате умножения которого на матрицу F получается пропорциональный ему вектор, т.е.:
![]() . (5.16)
. (5.16)
Преобразуем это уравнение:
![]() . (5.17)
. (5.17)
Данное
уравнение имеет ненулевое решение, если
определитель матрицы
![]() равен нулю, т.е.:
равен нулю, т.е.:
![]() .
.
Корни
![]() последнего уравнения называются
собственными числами.
последнего уравнения называются
собственными числами.
В
результате решения уравнения (5.17) для
каждого из собственных чисел получаем
соответствующий собственный вектор
![]() .
.
Теперь о сути метода модального диагностирования. Весь тестовый эксперимент состоит из n шагов (по числу собственных векторов). На каждом шаге в диагностируемое устройство заносятся новые начальные условия, совпадающие со значением очередного собственного вектора. При этом начальное условие, заносимое устройство диагностирования, является некоторой функцией от этого собственного вектора.
На основании выражения (5.14) и с учетом равенства начальных условий некоторому собственному вектору имеем:
![]() .
.
С учетом (5.18) получаем:
![]() .
.
В результате выражение для выхода имеет вид:
![]() .
.
Таким образом, эталонная реакция может быть сформирована устройством первого порядка.