

Классификация механизмов саморегуляции
Классификация видов саморегулирования в живых системах •еще мало разработана. С. Н. Брайнес и В. Б. Свечинский предложили общую схему управления функциями организма на трех уровнях. Низший уровень нервной и гуморальной регуляции обеспечивает по интероцептивным сигналам постоянство основных физиологических констант (кровяного давления, состава крови, температуры тела и т. д.). Средний уровень безусловнорефлекторного управления обеспечивает приспособительные реакции организма в связи с изменениями его состояния (например, поведение голодного и сытого животного). Высший уровень условнорефлекторного управления обеспечивает по сигналам внешнего мира приспособительные изменения вегетативной сферы и целостного поведения организма.
Анализ процессов управления с учетом термодинамических критериев привел к выделению семи уровней целесообразного саморегулирования в ответ на внешние так называемые энтропийные факторы, повышающие внутреннюю энтропию живой системы:
1. Стабилизация путем поддержания постоянными параметров системы при кратковременном действии слабых энтропийных факторов.
2. Адаптация путем перестройки внутренней структуры и функций системы при длительном или постоянном действии слабых энтропийных факторов.
3. Самовосстановление путем создания новых структур взамен разрушенных кратковременным действием сильных энтропийных факторов.
4. Размножение путем воспроизведения себе подобных для сохранения системы вида при действии факторов, уничтожающих отдельные особи.
5. Развитие путем объединения и реализации в одной системе всех предыдущих уровней саморегулирования при действии разнообразных энтропийных факторов.
6. Эволюция путем переключения на использование новых видов веществ и энергии при действии энтропийных факторов истощения окружающей среды
7. Соревнование-путем формирования структур и развития функций, противодействующих влиянию энтропийных факторов, порождаемых деятельностью других биокибернетических систем.
В технике возможно четкое разделение управляющего устройства и объекта управления. Однако в живом организме они настолько переплетаются, что границу между ними бывает трудно провести. Например, когда образующиеся при переваривании пищи пептоны, всасываясь в кровь, вызывают усиленное выделение желудочного сока, который увеличивает образование пептонов, то белковые вещества выступают в роли управляющего устройства и в роли объекта управления. Более ясное разграничение управляющих и исполнительных структур имеет место в системе движений. В управляющих воздействиях предыдущих звеньев рефлекторного механизма на последующие проявляется принцип детерминирующей роли «станции отправления».
Ф. Гродинз предпринял попытку анализа общих принципов организации управляющих систем, наиболее выраженных в биологических системах. Он выделил в управляющем устройстве две подсистемы — детектор ошибки и собственно регулятор. Первая оценивает рассогласование между фактическим выходным и заданным сигналами. Вторая, получив сигнал ошибки, вычисляет и выдает на выход скорректированную управляющую команду, которая поступает к управляемому объекту (см. схему). Во всех рефлекторных механизмах проявляется управляющее воздействие предыдущих звеньев на последующие.
7
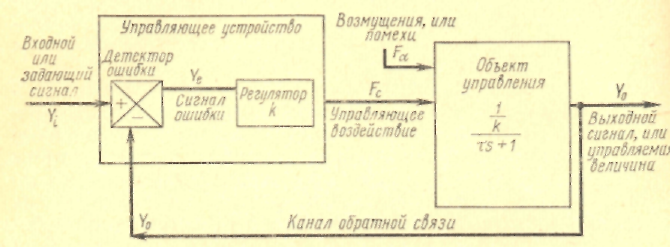
Блок-схема системы управления с обратной связью (по Ф, Гродинзу)