

18. Метод z-буфера.
Другим методом «грубой силы» является метод Z-буфера, который весьма удобен для аппаратной реализации ввиду простоты алгоритма и используемого в нем набора операций. Временные характеристики этого метода линейно зависят от количества точек растра и «глубинной сложности сцены», т.е. усредненного числа граней, взаимно закрывающих друг друга.
Для реализации метода используются две области памяти: буфер глубины (Z-буфер) и буфер кадра (хранящий информацию о состоянии пикселов экрана компьютера). Буфер длины используется для хранения координаты Z (глубины) каждого видимого на данной стадии анализа изображения пиксела картинной плоскости. В буфере кадра запоминаются атрибуты (интенсивность и цвет) соответствующего пикселя.
Формально описание метода
таково. Предположим, что сцена представлена
в виде объединения многоугольников
(возможно, пересекающихся). Построим
ортогональную проекцию сцены на картинную
плоскость ![]() .
.
Предполагается следующая последовательность шагов:
Инициализировать буфер кадра фоновыми значениями интенсивности или цвета.
Инициализировать буфер глубины значениями глубины фона.
Для каждой грани сцены последовательно:
Преобразовать проекцию границ в растровуюформу.
Для каждого пиксела проекции вычислить его глубину
 ;
;Сравнить значение
 с
соответствующим значением буфера
глубины
с
соответствующим значением буфера
глубины .
.Если
 ,
то:
,
то:Записать атрибуты этого пиксела в буфер кадра;
Записать значение
 в
соответствующую позицию буфера
глубины
в
соответствующую позицию буфера
глубины .
.Иначе – никаких действий не производить.
14.Особенности проекций гладких отображений
1-й случай
Заданная поверхность плоскость, описываемая уравнением Z = X и проектируемая на плоскость X = 0 (рис. 1).
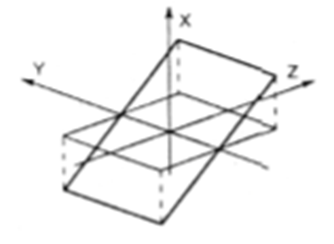 Записав
ее уравнение в неявном виде X-Z=0,
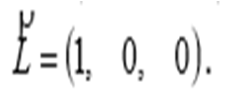
Вектор L,
вдоль которого осуществляется
проектирование, имеет координаты
Записав
ее уравнение в неявном виде X-Z=0,
Вектор L,
вдоль которого осуществляется
проектирование, имеет координаты
 Вычислим
координаты нормального вектора:
Вычислим
координаты нормального вектора:
 Скалярное
произведение этих двух векторов отлично
от нуля:
Скалярное
произведение этих двух векторов отлично
от нуля:
 Тем
самым вектор проектирования и нормальный
вектор рассматриваемой поверхности не
перпендикулярны ни в одной точке.
Отметим, что полученная проекция
особенностей не имеет.
Тем
самым вектор проектирования и нормальный
вектор рассматриваемой поверхности не
перпендикулярны ни в одной точке.
Отметим, что полученная проекция
особенностей не имеет.

2-й случай
Заданная
поверхность параболический цилиндр с
уравнением
Z
= X2 или,
что то же, X2
- Z = 0. Нормальный вектор ![]() ортогонален
вектору проектирования L
ортогонален
вектору проектирования L ![]() в
точках оси Y. Это вытекает из того, что
в
точках оси Y. Это вытекает из того, что ![]() .
.
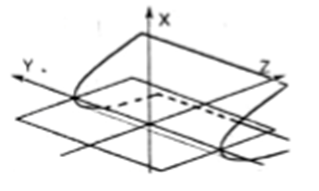 Здесь,
в отличие от первого случая, точки
плоскости X
= 0 разбиваются
на три класса: к первому относятся точки
(Z > 0), у которых два прообраза (на рис.
2 этот класс заштрихован); ко второму
те, у которых прообраз один (Z = 0);
Здесь,
в отличие от первого случая, точки
плоскости X
= 0 разбиваются
на три класса: к первому относятся точки
(Z > 0), у которых два прообраза (на рис.
2 этот класс заштрихован); ко второму
те, у которых прообраз один (Z = 0);
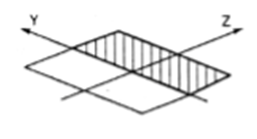
к третьему классу относятся точки, у которых прообразов на цилиндре нет вовсе. Прямая X = 0, Z = 0является особой. Вдоль нее векторы N ρ и L ρ ортогональны. Особенность этого типа называется складкой.
3-й случай
Рассмотрим поверхность, заданную уравнением X3 + XY - Z = 0.
Пусть Y = 1. Тогда Z = X3 + X (рис. 3).
При Y = 0 имеем: Z = X3 (рис. 4).
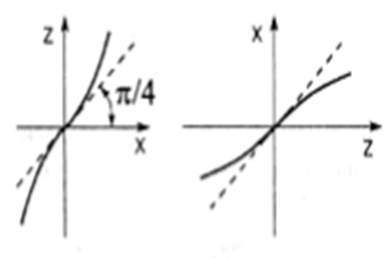 рис.3
рис.3
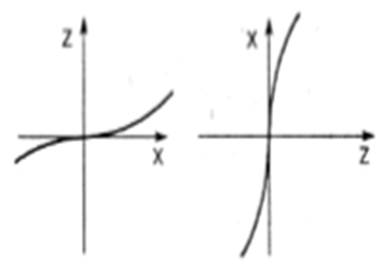 рис.
4
рис.
4
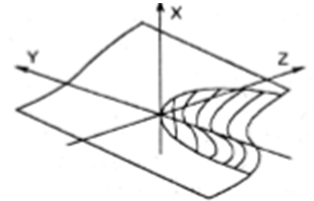
Наконец, при Y = 1 получаем: Z = X3 - X (рис. 5).
 рис.
5
рис.
5
Построенные сечения дают представление обо всей поверхности. Поэтому нарисовать ее теперь уже несложно (рис. 6).

16.Растровая развертка отрезка
Для горизонтальных, вертикальных и наклоненных под углом 45°. отрезков выбор растровых элементов очевиден. При любой другой ориентации выбрать нужные пиксели труднее. Общие требования к изображению отрезка:
· концы отрезка должны находиться в заданных точках;
· отрезки должны выглядеть прямыми,
· яркость вдоль отрезка должна быть постоянной и не зависеть от длины и наклона.
Ни одно из этих условий не может быть точно выполнено на растровом дисплее в силу того, что изображение строится из пикселей конечных размеров, а именно:
· концы отрезка в общем случае располагаются на пикселях, лишь наиболее близких к требуемым позициям и только в частных случаях координаты концов отрезка точно совпадают с координатами пикселей;
· отрезок аппроксимируется набором пикселей и лишь в частных случаях вертикальных, горизонтальных и отрезков под 45 они будут выглядеть прямыми
· яркость для различных отрезков и даже вдоль отрезка в общем случае различна, так как, например, расстояние между центрами пикселей для вертикального отрезка и отрезка под 45 различно
Алгоритмы генерации отрезка:
1) Цифровой дифференциальный анализатор. Решается дифференциальное уравнение вида dY/dX = Py/Px, где Py = Yk - Yn - приращение координат отрезка по оси Y, а Px = Xk - Xn - приращение координат отрезка по оси X. При этом ЦДА формирует дискретную аппроксимацию непрерывного решения этого дифференциального уравнения. В обычном ЦДА, используемом, как правило, в векторных устройствах, тем или иным образом определяется количество узлов N, используемых для аппроксимации отрезка. Затем за N циклов вычисляются координаты очередных узлов. Получаемые значения Xi, Yi преобразуются в целочисленные значения координаты очередного подсвечиваемого пикселя либо округлением, либо отбрасыванием дробной части. Генератор векторов, использующий этот алгоритм, имеет тот недостаток, что точки могут прописываться дважды, что увеличивает время построения. Кроме того из-за независимого вычисления обеих координат нет предпочтительных направлений и построенные отрезки кажутся не очень красивыми.
2) Алгоритм Брезенхема.
Так как приращения координат, как
правило, не являются целой степенью
двойки, то в ЦДА-алгоритме требуется
выполнение деления, что не всегда
желательно, особенно при аппаратной
реализации. Брезенхем предложил алгоритм,
не требующий деления, как и в алгоритме
несимметричного ЦДА, но обеспечивающий
минимизацию отклонения сгенерированного
образа от истинного отрезка, как в
алгоритме обычного ЦДА. Основная идея
алгоритма состоит в том, что если угловой
коэффициент прямой < 1/2, то естественно
точку, следующую за точкой (0,0), поставить
в позицию (1,0) (рис. а), а если угловой
коэффициент > 1/2, то - в позицию (1,1) (рис.
б). Для принятия решения куда заносить
очередной пиксел вводится величина
отклонения Е точной позиции от середины
между двумя возможными растровыми
точками в направлении наименьшей
относительной координаты. 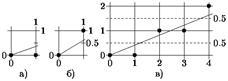 Знак
Е используется как критерий для выбора
ближайшей растровой точки. Если Е < 0,
то точное Y-значение округляется до
последнего меньшего целочисленного
значения Y, т.е. Y-координата не меняется
по сравнению с предыдущей точкой. В
противном случае Y увеличивается на 1.
Знак
Е используется как критерий для выбора
ближайшей растровой точки. Если Е < 0,
то точное Y-значение округляется до
последнего меньшего целочисленного
значения Y, т.е. Y-координата не меняется
по сравнению с предыдущей точкой. В
противном случае Y увеличивается на 1.
3) Модифицированный алгоритм Брезенхема. Основная идея алгоритма состоит в том, чтобы для ребер многоугольника устанавливать яркость пикселя пропорционально площади пикселя, попавшей внутрь многоугольника.
Одной из уникальных характеристик растрового графического устройства является возможность представления сплошных областей. Генерацию сплошных областей из простых описаний ребер или вершин будем называть растровой разверткой сплошных областей, заполнением многоугольников или заполнением контуров. Для этого можно использовать несколько методов, которые обычно делятся на 2 категории: растровая развертка и затравочное заполнение.
 В
методах растровой развертки пытаются
определить в порядке сканирования
строк, лежит ли точка внутри многоугольника
или контура. Эти алгоритмы обычно идут
от "верха" многоугольника к "низу".
В
методах растровой развертки пытаются
определить в порядке сканирования
строк, лежит ли точка внутри многоугольника
или контура. Эти алгоритмы обычно идут
от "верха" многоугольника к "низу".
В методах затравочного заполнения предполагается, что известна некоторая точка (затравка) внутри замкнутого контура. В алгоритмах ищут точки, соседние с затравочной и расположенные внутри контура. Если соседняя точка расположена не внутри контура, то значит, обнаружена граница контура. Если же точка расположена внутри контура, то она становится затравочной точкой и поиск продолжается рекурсивно. Подобные алгоритмы применимы только к растровым устройствам.
Многие замкнутые контуры являются простыми многоугольниками. Ели контур состоит из кривых линий, то его можно аппроксимировать подходящим многоугольником или многоугольниками. Простейший метод заполнения многоугольника состоит в проверке на принадлежность внутренности многоугольника каждого пиксела в растре. Этот методслишком расточителен. Затраты можно уменьшить путем вычисления для многоугольника прямоугольной оболочки - наименьшего многоугольника, содержащего внутри себя многоугольник.