

3 раздел Скалярное управление
.pdfстабилизации электромагнитного момента М (или так называемый контур регулирования абсолютного скольжения Sa [6]) входят:
Операционный суммирующий усилитель А2 задающего напряжения по частоте Uз.ч с условным коэффициентом усиления kA2 1; инвертор тока
UZA с коэффициентом передачи по частоте k f ; тахогенератор BR с
коэффициентом положительной обратной связи по скорости kс,п .
В системе применено ограничение сигнала управления частотой
|
|
|
|
Uу.ч,max , создаваемое стабилитронами V1, V2 |
|||||||
напряжения статора Uу.ч,огр |
|||||||||||
в цепи обратной связи усилителя А1, т.е. |
|
|
|
|
|
|
|||||
|
|
U |
у.ч,max |
при (U |
з.с |
-k |
|
ω)k |
р.с |
U |
; |
|
|
|
|
c.о |
|
у.ч,огр |
|
||||
|
|
|
|
|
|
|
|
|
|
(3.47) |
|
|
Uу.ч |
|
|
|
|
|
|
|
|
||
|
|
U |
у.ч |
|
|
|
|
|
|
|
|
|
|
при (Uз.с -kc.оω)kр.с <Uу.ч,огр , |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
где kc.о |
− коэффициент отрицательной обратной связи по скорости |
||||||||||
двигателя; kр.с |
− коэффициент усиления П-регулятора скорости, |
||||||||||
реализованного на ОУ А1. |
|
|
|
|
|
|
|
|
|||
При |
пуске |
АД, |
когда |
выполняется |
|
|
|
|
отрицательная |
||
Uу.ч Uу.ч,max , |
|||||||||||
обратная связь по скорости с коэффициентом kc.о в канале частоты отключена (за счет пробоя стабилитронов V1, V2) и действует только положительная обратная связь по скорости с коэффициентом kc.п (см. рис. 3.28). Система работает в режиме стабилизации момента двигателя М (3.27),
поддерживая постоянство ускорения двигателя dω при его разгоне. dt
Запишем уравнения, характеризующие работу канала частоты ω в
режиме стабилизации момента двигателя:

U |
з.ч (Uз.м kс,пω)kA2 , kA2 1; |
||||||
|
|
|
|
|
|
(3.48) |
|
U |
|
|
|
f |
pпω1 |
||
з.ч |
k |
f |
, |
||||
|
|||||||
|
|
1 |
2π |
|
|||
|
|
|
|
|
|
||
где Uз.м Uу.ч,max − задающее напряжение по моменту двигателя; |
f1− |
||||||
циклическая частота напряжения U1, подводимого к обмоткам статора АД; |
|||||||
ω1 − угловая частота вращения поля статора; |
pп − |
число пар полюсов |
|||||
фазных обмоток АД. |
|
|
|
|
|
|
|
Средняя динамическая МХ АД согласно (3.36) определяется |
|||||||
уравнением |
|
|
|
|
|
|
|
T |
dM |
|
M β |
(ω -ω), |
(3.49) |
||
|
|
||||||
э.т |
dt |
|
|
т 1 |
|
|
|
где βт dM / dω M / ω |
и Tэ.т |
− |
модуль |
жесткости |
МХ, |
||
линеаризованной на рабочем участке, и эквивалентная электромагнитная постоянная времени АД, определяемые соответственно соотношениями
(3.37) и (3.38); ω − угловая скорость вращения ротора, рад/с.
Решая систему уравнений (3.48) относительно частоты ω1 и подставляя ее в (3.49), получаем
dM Tэ.т dt
M β |
|
2πk f |
|
|
|
|
||
|
т |
pп |
|
|
|
|
|
2πk |
f |
k |
с,п |
|
|
|
U |
|
|
|
|
1 |
ω . |
(3.50) |
||
з.м |
|
|
|
|
|||||
|
|
pп |
|
|
|
|
|||
|
|
|
|
|
|||||
Для установившегося режима, когда dMdt 0, вместо (3.50) имеем:
|
|
2πk |
f |
|
|
|
2πk |
f |
k |
с,п |
|
|
M β |
|
|
U |
|
|
|
|
1 |
ω . |
|||
|
|
з.м |
|
|
|
|
||||||
|
т |
pп |
|
|
|
pп |
|
|
|
|||
|
|
|
|
|
|
|
||||||
Отсюда видно, что момент двигателя зависит от его скорости ω .
Однако рассматриваемый контур должен обеспечить постоянство момента М в установившемся режиме работы АД. Этого можно добиться выбором значения коэффициента положительной обратной связи по скорости из условия
|
|
|
|
|
|
|
|
2πk f kс,п |
1 0. |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
pп |
|
|
|
|
|
|
|
|
|
Откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kс,п |
pп |
|
. |
|
|
|
(3.51) |
|||
|
|
|
|
|
|
|
|
2 k f |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
С учетом (3.51) уравнение динамической характеристики (3.50) |
|||||||||||||||||
принимает вид |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
T |
dM |
M β |
|
k |
|
U |
|
, |
(3.52) |
|||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
э.т |
dt |
|
|
т |
|
M |
|
з.м |
|
|
||
где k |
|
1 / k |
|
2πk f |
. Уравнение (3.52) |
полностью согласуется с ранее |
||||||||||||
M |
|
|||||||||||||||||
|
||||||||||||||||||
|
|
с,п |
|
pп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
полученной передаточной функцией по моменту (3.40). |
|
|||||||||||||||||
|
Эквивалентная электромагнитная постоянная времени АД Tэ.т |
|||||||||||||||||
достаточно |
мала: |
Tэ.т (0,01 0,1) с. |
Это |
|
определяет крутой |
характер |
||||||||||||
апериодического переходного процесса по моменту М=М(t). |
|
|||||||||||||||||
Следует отметить, что в системах частотного и частотно-токового управления асинхронного ЭП обычно применяются однополюсные ( pп 1)
машины, что еще более упрощает полученные соотношения.
Таким образом, все параметры контура стабилизации электромагнитного момента АД при его пуске полностью определяются выбранным значением коэффициентом передачи АИТ по частоте k f и
конструкцией асинхронной машины.
3.6.4.4Синтез параметров контура регулирования скорости
Вконтур регулирования скорости АД, согласно рис.3.28, входят: П-
регулятор скорости с условным коэффициентом усиления kРС 1,
выполненный на суммирующем ОУ А1; усилитель А2 с коэффициентом усиления kA2 1; инвертор тока UZA с коэффициентом передачи по частоте k f ; тахогенератор BR с коэффициентом отрицательной обратной связи по
скорости kс,o .
Контур скорости автоматически вступает в работу, когда усилитель А1
выходит из зоны насыщения, т.е. когда скорость АД подходит к заданной ω1
и согласно (3.47) начинает выполняться условие:
(U |
з.c |
k |
ω)k |
РС |
U |
. |
|
c,o |
|
у.ч,огр |
|
При этом согласно конструкции системы частотно-токового управления положительная обратная связь по скорости с коэффициентом передачи kc,п автоматически должна быть отключена.
Скорость АД можно представить в виде:
|
|
|
|
|
|
ω=ω1-Δω |
|
|
|
|
|
|||
|
|
2πf1 |
ω |
2πf1,ном |
|
f1 |
|
Δω |
ω |
|
(3.53) |
|||
|
|
|
|
|
||||||||||
|
|
pп |
|
|
|
pп |
|
|
f1,ном |
|
ω1,ном |
1,ном |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
f1 |
1,ном |
Δω |
ω1,ном ( f1,отн Sa )ω1,ном , |
|
|||||||||
f1,ном |
ω1,ном |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
где f1,отн f1 / f1,ном − относительная частота фазного напряжения статора
U1; Sa − абсолютное скольжение АД, определяемое согласно (3.16).
С учетом (3.47) и (3.53) запишем уравнения, характеризующие работу канала частоты в режиме стабилизации скорости двигателя:
(Uз.ч kс,oω)kрс U у.ч ,kрс 1 |
|
|
|
f1 f1,ном f1,отн ; |
|
U у.чk f |
(3.54) |
|
|
Sa )ω1,ном =ω. |
|
( f1,отн |
|
|
|
|
|
Решая систему уравнений (3.54) относительно частоты |
f1 напряжения |
|
U1, подводимого к статору, т.е.
Uз.ч kс,oω1,ном f1,отн Sa k f f1,ном f1,отн ,
получаем относительную частоту напряжения статора
|
|
|
U |
з.ч |
|
k f |
|
|
k |
|
|
|
||
f |
|
|
|
|
|
|
+ |
|
ω |
S |
a |
, |
(3.55) |
|
|
|
|
|
|
|
|||||||||
1,отн |
|
1 |
kω |
|
f1,ном |
|
1 kω |
|
|
|||||
|
|
|
|
|
|
|
||||||||
где kω − коэффициент усиления системы по контуру скорости ω :
kω kс,оω1,ном |
k f |
. |
(3.56) |
|||
f |
||||||
|
|
|
|
1,ном |
|
|
Задающее напряжение по контуру регулирования скорости Uз.ч |
||||||
находится для режима идеального х.х. АД при Sa =0, когда |
|
|||||
f1,отн |
|
k f |
Uз.ч f1,отн,o. |
|
||
|
|
|
||||
|
kω ) f1,ном |
|
||||
(1 |
|
|
|
|
||
откуда
Uз.ч |
(1 kω ) f1,отн,o f1,ном |
. |
(3.57) |
|
|||
|
k f |
|
|
В формуле (3.57) известны все параметры кроме коэффициента kω . В
работе [6] коэффициент усиления по контуру скорости определяется, исходя из требуемого значения статизма регулирования скорости:
|
ω |
|
ω1,0 ω |
=1 |
ω |
, |
(3.58) |
ω1,0 |
ω1,0 |
ω1,0 |
где ω1,0 − угловая скорость двигателя в режиме идеального х.х.
Подставив значение задающего напряжения (3.57) в формулу (3.55),
относительную частоту напряжения, питающего двигатель, подставим в виде
f1,отн f1,отн,o + |
|
kω |
Sa . |
(3.59) |
|
kω |
|||
1 |
|
|
||
Из (3.53) и (3.59) находим:
для текущего значения скорости АД:
|
Sa |
|
|
|
ω= f1,отн,o |
|
|
ω1,ном ; |
(3.60) |
|
||||
|
1 kω |
|
|
|
для скорости идеального х.х, когда Sa 0 :
|
|
ω1,0 =f |
|
|
|
ω |
|
. |
|
|
|
|
(3.61) |
|||
|
|
|
|
1,отн,o 1,ном |
|
|
|
|
|
|
|
|
||||
подставляя (3.60) и (3.61) в (3.58), для статизма МХ двигателя получаем |
||||||||||||||||
|
f1,отн,o Sa / (1 kω ) ω1,ном |
|
|
S |
|
|
||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
= |
|
|
a |
|
. |
|
f |
ω |
|
|
|
|
|
f |
|
(1 k ) |
||||||
|
|
1,отн,o 1,ном |
|
|
|
|
|
1,отн,o |
|
ω |
||||||
Отсюда при зад |
определяется требуемый коэффициент усиления |
|||||||||||||||
системы по контуру скорости: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
kω,треб = |
|
|
Sa |
1. |
|
|
(3.62) |
||||||||
|
|
f1,отн,o зад |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Учитывая, что при ω1=ω1,ном |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
ω |
-ω |
|
|
ω |
|
|
|
|
|
|
|
|
|
|
|
Sa = |
1,ном |
|
|
1 |
|
|
|
|
Sa,ном |
|
|
|
|
||
|
ω1,ном |
|
ω1,ном |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
и

Sa,ном |
= |
ω1,ном -ω |
|
f1,ном |
|
ω1,ном -ω |
|
pпω1,ном / 2π |
= |
|
|
|
|
|
|||||
f1,отн,o |
ω1,ном |
f1,0 |
ω1,ном |
pпω1,0 / 2π |
|
||||
= ω1,ном -ω раз ,
ω1,0
соотношение (3.62) можно представить в виде
kω,треб раз 1.зад
Из (3.56) и (3.62) определяем коэффициент отрицательной обратной связи по скорости kc,o :
|
f1,номkω,треб |
|
p |
kω,треб |
|
|
k |
|
|
п |
|
|
. |
|
|
|
||||
c,o |
ω1,номk f |
|
2π |
k f |
|
|
|
|
|
||||
Таким образом, параметры контура регулирования скорости двигателя в линейном режиме работы системы АИТ-АД (см. рис. 3.28) полностью определены.
Примерные графики переходных процессов момента и скорости при пуске АД в рассматриваемой системе частотно-токового управления с П-
регуляторами тока и скорости приведены на рис. 3.30. Видно, что положительная обратная связь по скорости, обеспечивающая постоянство момента M const при пуске, формирует линейное нарастание частоты ω ,
что в свою очередь, приводит к разгону АД с постоянным ускорением.
Механические характеристики асинхронного ЭП с системой частотно-
токового управления на основе АИТ приведены на рис. 3.31. Они имеют два выраженных участка: 1 − стабилизации скорости и 2 − стабилизации момента
(при пуске АД).
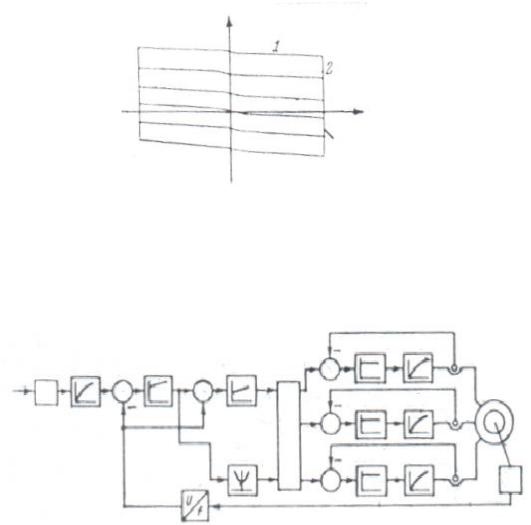
M
М M max
M max 0,8Mкр
Рисунок 3.31 − Механические характеристики асинхронного электропривода с системой частотно-токового управления на основе АИТ
|
|
|
|
|
|
|
|
i*A |
РТФ А |
НПЧA |
|
|
iA |
|
|
Ф |
|
РС |
|
РЧ |
|
|
|
u |
A |
|
|||
Uз.c |
* |
|
* |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
BI A |
|
||||||
ЗИ |
|
|
|
|
|
1 |
|
|
|
|
АД |
|||
|
|
|
|
|
|
|
|
РТФ В |
НПЧB |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
iB |
|
||
|
|
|
|
|
|
|
|
|
|
uB |
|
|
||
|
|
|
|
|
|
|
G |
* |
|
|
BIB |
|
||
|
|
|
|
|
|
* |
|
i |
B |
|
|
|
|
|
|
|
|
|
|
БН |
|
|
РТФ С |
НПЧ С |
|
|
|
|
|
|
|
|
|
|
i |
s |
|
|
u |
|
|
i |
|
|
|
|
|
|
ПЧ |
|
|
|
|
|
C |
|
C |
BF |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
i*C |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
BIC |
|
||
Рисунок 3.32 − Обобщенная функциональная схема частотно-токовой СПР скорости АД на основе преобразователей частоты с непосредственной связью
3.6.5 Функциональная схема частотно-токовой системы
подчиненнго регулирования скорости АД на основе преобразователей
частоты с непосредственной связью
Формирование требуемых переходных процессов в системах ПЧ-АД может осуществляться также с помощью последовательной коррекции в системах с подчиненным регулированием координат. Такие системы выполняются с теми же связями, обеспечивающими стабилизацию магнитного потока Ф и скорости ω. Обычно создаются двухконтурные СПР с

контуром напряжения (в системах ПЧ-АД в виде АИН) и с контуром тока (в
системах ПЧ-АД в виде АИТ), стабилизирующими магнитный поток, и
контуром скорости, стабилизирующим скорость. Схемы таких систем можно найти в работах [3,4].
Системы частотно-токового управления типа ПЧТ-АД могут быть построены по принципу СПР и на основе НПЧ. В этом случае контур регулирования момента М подчинен контуру регулирования скорости ω и
содержит в себе контуры регулирования фазных токов статора.
Обобщенная функциональная схема частотно-токовой СПР скорости АД на основе НПЧ приведена на рис. 3.32. Структура управляющей части данной системы по контуру скорости аналогична структуре САУ ЭП на рис.
3.28.
Система на рис. 3.32 работает следующим образом. По измеренному скольжению ω -ω с выхода ПИ-регулятора скорости РС с помощью блока нелинейности БН формируется заданное значение тока статора is (i1 ) .
Задающий генератор G синусоидальных сигналов с регулируемой частотой и амплитудой имеет два канала управления: по синхронной частоте ω1 и по амплитуде тока 
 2is .Трехфазная система синусоидальных сигналов задания токов iA , iB и iC с выхода G поступает на входы соответствующих П-
2is .Трехфазная система синусоидальных сигналов задания токов iA , iB и iC с выхода G поступает на входы соответствующих П-
регуляторов фазных токов статора: РТФА, РТФВ и РТФС.
Реализация такой САУ ЭП предполагает высокую точность измерения скольжения ω -ω и высокий коэффициент усиления в контуре регулирования тока, обеспечивающий работу фазных НПЧ: НПЧ А, НПЧ В и НПЧ С в режимах близких к ИТ.
Данная система обеспечивает работу АД на линейной части механических характеристик как в установившихся, так и в переходных режимах пуска и торможения, при ограничении момента и тока. При этом