

3 раздел Скалярное управление
.pdfАИТ
U1 f1
АД
Рисунок 3.22 − Обобщенная схема системы АИТ – АД
Управление двигателем производится с помощью сигналов задания
выходного тока Uз.т. и частоты (на рис, 3.23, а не показан)
преобразователя частоты. Оба сигнала, в свою очередь, зависят от общего сигнала управления U y.
При питании АД от источника тока вследствие размагничивающего действия тока ротора магнитный поток АД заметно изменяется при изменении абсолютного скольжения. Поэтому для стабилизации магнитного потока АД при изменении его нагрузки в канал задания тока ПЧТ вводится функциональный преобразователь ФП, определяющий задание тока статора
I1 в функции абсолютного скольжения sa . Зависимость I1 F(sa ) и
пропорциональная ей зависимость Uз.т. Ф(Uy ) являются нелинейными
функциями (рис. 3.24), которые на рабочих участках механических характеристик АД отвечают условию I12 sa . Кривые этих зависимостей
симметричны относительно оси тока (задания тока), что определяется
симметрией механических характеристик АД в двигательном и
генераторном режимах его работы. Часто при технической реализации ФП пользуются линейной аппроксимацией зависимости I1 f (sa ) (штриховая

линия на рис. 3.24). Здесь значения I1max и Uз.т.max определяют
максимально допустимый ток статора и сигнал его задания, а I1min и
Uз.т.min — ток холостого хода АД и сигнал его задания.
u ФП uз.т |
АИТ |
|
u |
ФП |
uз.т |
ПЧТ |
РТ |
|
РТ |
||||
УВ |
|
|
||||
|
|
|
|
|
uзf |
НПЧ |
|
ДТ |
Др |
|
|
ГЧ |
|
|
|
|
|
|
ИТ
|
ДТ |
|
АД |
|
АД |
а) |
б) |
|
Рисунок 3.23 − Функциональные схемы систем ПЧ-АД при питании от источников тока на основе автономного инвертора (а) и преобразователя частоты с непосредственной связью (б)
uз.т , I1
I1,max (uз.т,max )
I1,min |
(uз.т,min ) |
sa ,u |
|
|
Рисунок 3.24 − Зависимость тока статора от абсолютного скольжения АД
3.6.2 Определение электромагнитного момента АД и характеристики функционального преобразователя при частотно-
токовом управлении

Системы частотно-токового управления на основе АИТ оказываются проще, чем системы частотного управления ЭП в виде АИН (см. подразд. 3.5), так как в них легче осуществляется стабилизация момента М АД,
пропорционального току, как в САУ ЭП постоянного тока. Управление в таких системах производится путем задания величины тока статора I (Is ) на управляемый выпрямитель УВ и частоты напряжения питания f1( fп ) на ИТ.
Такое управление основывается на том, что момент М и магнитный поток Ф
АД пропорциональны току статора I1 |
и |
абсолютному |
скольжению sa |
||||||||||
двигателя, а именно [6]. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m I |
|
|
R' |
s |
|
|
|
||||
М |
1 1 |
|
|
|
|
2 a |
; |
|
|
(3.27) |
|||
|
|
|
|
|
|
|
|||||||
|
|
|
|
C(s ) |
|
|
|
||||||
|
|
1,ном |
|
|
|
|
|
a |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||
Ф |
|
1 |
|
I |
|
|
A(sa ) |
; |
(3.28) |
||||
|
|
|
|
|
|
||||||||
|
с f |
|
|
1 |
|
C(s ) |
|
|
|
||||
|
1 1,ном |
|
|
|
|
|
|
a |
|
|
|
||
Где зависимости A(sa ) и С(sa ) с учетом схемы замещения фазы АД
(см. рис. 3.17) и рассеяния ротора 2 определяются соотношениями (3.18) и
(3.20), т.е.
A(sa ) (R2' )2 (x2' )2 sa2;
C(s ) a2 (1 |
|
)2 s2 |
|
|
R' |
|
|
x' |
||||
2 |
, |
a |
2 |
, |
2 |
|
2 |
. |
||||
|
|
|||||||||||
a |
|
|
a |
|
|
x |
|
x |
||||
|
|
|
|
|
|
|
|
|
||||
Здесь как и раннее, |
обозначены: |
f1,ном и |
1,ном 2 f1,ном / Pп − |
|||||||||
номинальные циклическая и круговая частоты вращения поля статора (рис.

2.1); m1 − число фаз обмотки статора; sa − абсолютное скольжение,
определяемое соотношением (3.16), т.е.
|
|
|
|
s |
f1 f |
|
1 |
|
|
, |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
a |
|
f1,ном |
|
1,ном |
|
1,ном |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
где |
2 f |
/ P |
− |
угловая |
скорость |
вращения |
поля статора, |
||||||||
|
1 |
1 |
п |
|
|
|
|
|
|
|
|
|
|
|
|
соответствующая заданной регулируемой частоте |
f1 фазного напряжения U1 |
||||||||||||||
, подаваемого на статор ( f1 |
в общем случае отлично от f1,ном ); Pп − число |
||||||||||||||
пар полюсов фазной обмотки статора; |
− |
угловая скорость АД; R' |
− |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
активное сопротивление ротора, приведенное к статору; x' |
− |
приведенное |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
индуктивное |
сопротивление ротора; |
x − |
индуктивность, |
связанная |
с |
||||||||||
основным магнитным потоком Ф; с1 − конструктивная постоянная АД.
Из (3.27) и (3.28) следует, что стабилизация момента ( M const ) и
магнитного потока (Ф const ) в системах частотно токового управления может осуществляться за счет стабилизации тока статора I1 const и
абсолютного скольжения sa const .
Как видно из рис. 3.23, значения тока статора I1 в виде сигнала Uз.т.
обеспечивается функциональным преобразователем ФП в зависимости от общего сигнала управления U y ( 1 ) sa 1,ном , т.е. в функции
абсолютного скольжения sa .
Характеристика ФП I1 F(sa ) (см. рис. 3.24) может быть найдена из
(3.28) при постоянном значении магнитного потока Ф Фном const : |
|
||||||
|
|
|
|
|
|
|
|
I |
c f |
Ф |
С(sa ) |
. |
(3.29) |
||
|
|||||||
1 |
1 1,ном |
|
|
A(sa ) |
|
||
|
|
|
|
|
|||

Отсюда для режима идеального холостого хода (х.х.), когда |
sa 0 , с |
|||
учетом значений A(0) и С(0) из (3.18) и (3.20) получаем ток холостого хода |
||||
статора: |
|
|
|
|
I |
|
с1 f1,ном |
Ф I |
(3.30) |
|
||||
1,х.х. |
|
x |
1,min |
|
|
|
|
|
|
Подставляя (3.30) в (3.29), находим удобную функциональную зависимость между требуемым (задаваемым) значением тока статора и абсолютным скольжением:
I |
I |
x |
C(sa ) |
. |
(3.31) |
|
|||||
1 |
1,min |
|
A(sa ) |
|
|
|
|
|
|
||
Зависимость (3.31) определяет нелинейную характеристику ФП,
приведенную на рис. 3.24. Линейная аппроксимация полученной зависимости (см. штриховую линию на рис. 3.24) представляет прямую линию, описываемую уравнением:
Iн kФП ( sa ) ,
или для зависимости Uз.т. Ф(U y ) :
Uз.т. kФП ( U y ) |
(3.32) |
где kФП − коэффициент передачи ФП.
3.6.3 Функциональная и структурная схемы системы частотно-
токового управления АД на основе АИТ
Известные положительные свойства АД при его питании от АИТ, такие как независимость электромагнитного момента АД от частоты и возможность при заданном токе статора и абсолютном скольжении, равном критическому, обеспечить больший момент, чем при питании от источника напряжения, могут быть реализованы лишь в замкнутой системе,
контролирующей абсолютное скольжение и ток двигателя в функции нагрузки. На рис. 3.25 представлена функциональная схема подобной системы частотно-токового управления АД. Источник тока реализован на основе управляемого выпрямителя УВ, ток нагрузки Iн которого задастся выходным напряжением UРТ регулятора тока РТ, пропорциональным разности напряжений Uз.т. на выходе ФП и Uо.т. датчика тока ДТ.
Стабилизация скорости АД обеспечивается за счет регулятора скорости PC,
на входе которого сравниваются напряжения задания скорости Uз.с. и
обратной связи Uо.с. выхода тахогенератора ТГ. Особенность схемы в том,
что здесь автоматически формируются сигналы, пропорциональные абсолютному скольжению и заданию синхронной скорости АД.
Сигнал, пропорциональный sa , формируется на выходе PC, поскольку
Uз.с. пропорционально заданию скорости 1 идеального холостого хода АД,
аUo.с. – текущей скорости ротора , т.е.
UРС Uз.с. Uо.с. 1 sa 1,ном |
(3.33) |
Если передаточный коэффициент формирования частоты скольжения ФЧС выбрать таким образом, чтобы с учетом 1,ном его выходной сигнал
UФЧС. был пропорционален ( 1 ), то после суммирования этого сигнала
с выходным сигналом U у.с. устройства сравнения УС, пропорциональным текущему значению , на входе устройства задания частоты УЗЧ инвертора тока ИТ преобразователя ПЧТ будет сформирован сигнал:
Uс UФЧС UУС ( 1 ) 1
В итоге на выходе УЗЧ будет сигнал задания частоты выходного тока АИТ Uv Uз.с. 1, определяющий задание синхронной скорости АД.
Из (3.33) видно, что выходной сигнал РС пропорционален
абсолютному скольжению sa и, следовательно, с учетом (3.27) определят электромагнитный момент АД. Поэтому выходным напряжением UБО блока ограничения БО на выходе PC можно воздействовать и на ограничение максимального момента АД.
Перед пуском двигателя (Uз.с. 0, UРС 0) сигнал задания частоты преобразователя U f 0 и за счет характеристики ФП (Uз.т.min 0 ) в АД задается постоянный ток, обеспечивающий поток намагничивания и режим динамического торможения АД. С увеличением Uз.с. возрастает сигнал задания частоты, ток статора становится переменным с заданной частотой и двигатель начинает вращение под действием максимального момента,
установленного сигналом Uз.с.
Увеличение скорости будет происходить до тех пор, пока не сравняются сигналы задания и обратной связи по скорости двигателя. После этого выходной сигнал PC при отсутствии статической нагрузки на валу АД вновь установится равным нулю, но за счет положительной обратной связи по скорости уже при Uз.f . 0. Поток холостого хода АД будет при этом
создаваться переменным током I1,min (см. рис. 3.24).
АИТ
|
|
|
|
|
|
|
ПЧТ |
РС |
БО |
ФП |
|
|
РТ |
|
|
uз.с 1 |
uРС |
uБО |
uз.т 3 |
|
uРТ |
УВ |
|
|
|
|
|
|
|
|
|
uо.с |
|
|
|
uо.т |
|
|
|
|
|
ФЧС |
|
|
ДТ |
|
Др |
|
|
|
|
|
|
|
Iн |
|
|
uФЧС |
|
2 uС |
УЗЧ |
uзf |
ИТ |
|
|
|
|
uус |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
УС |
|
|
f1, I1 |
АД
ТГ
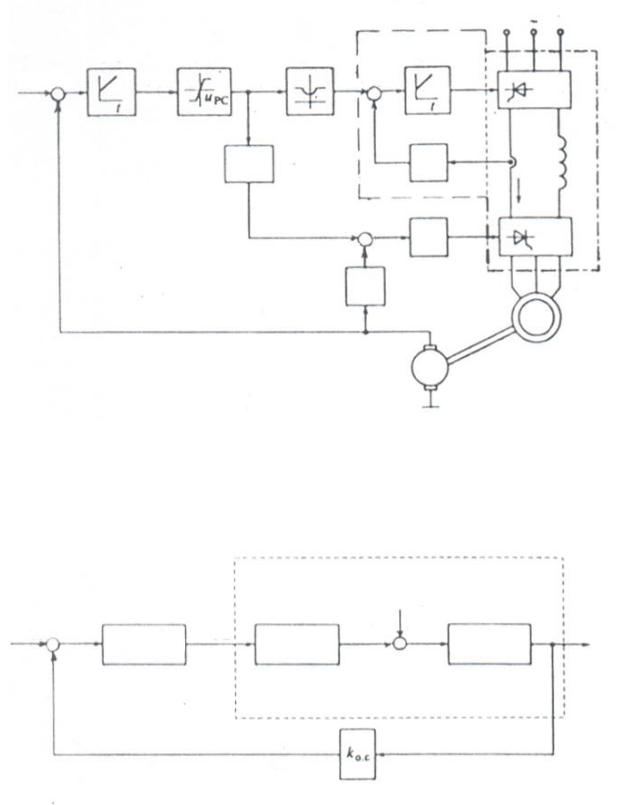
Рисунок 3.25 − Функциональные схема замкнутой системы АИТ-АД с частотно-токовым управлением
|
|
РС |
|
АД |
|
Mс |
|
||
|
|
uРС |
|
|
|
|
|||
uз.с |
u |
kРС |
1 |
kм т |
M |
1 |
|
||
|
|
TРС p |
|
1 Tэ.т p |
|
|
тTм.т p |
|
|
|
|
|
|
|
|
|
|||
uо.с
Рисунок 3.26 − Структурная схема системы АИТ-АД с частотно-токовым управлением
0
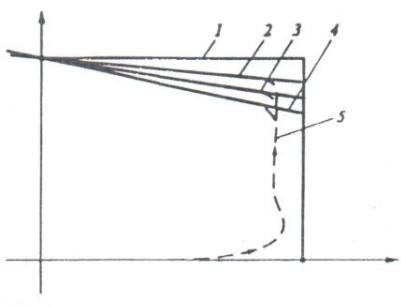
I з I , M
Рисунок 3.27 − Механические характеристики электропривода с подчиненным регулированием тока и скорости: 1 − при ПИ-РС; 2− при П-РС и Tm / (4T ) 1; 3 − при П-РС и Tm / (4T ) 1; 4 − при П-РС и
Tm / (4T ) 1; 5 − динамическая механическая характеристика; Iз Uз.т / ko.т − заданное значение тока
Для построения структурной схемы электропривода, показанного на
рис. 3.25, определим передаточные функции его отдельных звеньев и
условия, при которых момент АД (3.27) будет однозначно зависеть от абсолютного скольжения sa (при I1 const ).
Передаточная функция между заданной скоростью идеального холостого хода АД 1 и сигналом задания частоты на входе AИT Uз.f .
определяется соотношением (в линейном режиме роботы):
|
|
|
1(s) |
|
2 |
|
f |
2 k f |
1 |
|
|
|
|
|
W f (s) |
|
|
|
|
1 |
|
|
, |
(3.34) |
|
|
|
|
|
|
|
|
||||||
|
|
1 |
Uз. f . |
|
PП Uз. f . |
PП |
|
|
|
|||
|
|
|
|
|
|
|
||||||
где k f |
1 |
− передаточный коэффициент АИТ: |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k f |
|
|
f 1 |
|
f 1,ном |
. |
|
|
1 |
Uз. f |
Uз. f ,ном |
|
||||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||
В соответствии с рис. 3.25 |
|
|
|
|
|
|
||
Uз. f (s) Uз. f |
kУЗЧ (kФЧС UРС kУСkо.с ), |
(3.35) |
||||||
где kУЗЧ , kФЧС , kУС , kо.с − передаточные коэффициенты устройств УЗЧ, ФЧС, УС и цепи обратной связи по скорости АД:
k |
УЗЧ |
Uз.f ; |
k |
|
UФЧС ; |
|
Uc |
ФЧС |
Uз.ч.с |
||
|
|
|
|
||
|
k |
Uо.с ; |
k |
УС |
UУС . |
|
о.с |
|
|
Uо.с. |
|
|
|
|
|
||
При питании АД от источника тока его передаточная функция относительно изменений электромагнитного момента и разности изменений заданной скорости идеального холостого хода и текущего значения скорости
WM (s) |
M (s) |
|
т |
|
|
1(s) (s) |
Тэт s |
1 |
|||
|
|
Здесь т − модуль жесткости МХ, определяемый по формуле:
т |
2Mк.т |
, |
|
1,номsкт |
|||
|
|
(3.36)
(3.37)